�@�@�@�@�@�@���s���瑖���@�@�@�@�@�@
1 �F�Ȋw���F
�����������������H
|
|
|
2 �F�Ȋw���F04/08/28 00:41 ID:loi7PC8s
�P�O�O���[�g�����X�b��ł�
3 �F���J�����������F04/08/28 01:09 ID:9Lrp0Be3
2�����s�̃X�����d�����Ă���̂�
�������炱�̃X���́A�u�O�����s�X���v�Ƃ��Ă����肵�܂��B
2�����s���������Ɠ��������(ry
�������炱�̃X���́A�u�O�����s�X���v�Ƃ��Ă����肵�܂��B
2�����s���������Ɠ��������(ry
4 �F���J�����������F04/08/28 01:10 ID:y2/UdRki
����͂܂��A�g���r���[�����m�I�@���s�ɐ������܂����B
5 �F���J�����������F04/08/28 09:48 ID:QAte9RPV
����Ȃ瑖��A�����Ȃ�����A���Ă����̐��䂶��Ȃ��A
�����Ă����Ԃ���A�~�܂炸�ɑ���o�����Ď��ł��ˁH
�����Ă����Ԃ���A�~�܂炸�ɑ���o�����Ď��ł��ˁH
6 �F�Ȋw���F04/08/28 10:10 ID:loi7PC8s
���̒ʂ肶���
7 �F���J�����������F04/08/28 15:57 ID:CVHuwysW
����ƁA�ꎞ�I�ɗ��������ɕ�����Ԃ���������̂ŁA
������萔�i����ł��B
������萔�i����ł��B
8 �F���J�����������F04/08/28 17:09 ID:4vbE0wJn
��
http://rddp.jp/
�����T�C�g�B
�w�h��������E�U�E���{�b�g/���A���h���[���h��������v���W�F�N�g�x
�o���_�C��������ˁB
�S���ő�R�e����č���P�e�������Ă��B
��R�e�ڂ�2010�N�ɔ����B
http://rddp.jp/
�����T�C�g�B
�w�h��������E�U�E���{�b�g/���A���h���[���h��������v���W�F�N�g�x
�o���_�C��������ˁB
�S���ő�R�e����č���P�e�������Ă��B
��R�e�ڂ�2010�N�ɔ����B
9 �F�Ȋw���F04/08/28 23:53 ID:loi7PC8s
10 �F���J�����������F04/08/29 22:40 ID:BPEO+cTQ
�͂₭�J�������
11 �F���J�����������F04/08/30 05:09 ID:cdCCN4n3
�����
12 �F���J�����������F04/09/01 01:48 ID:KIpdjmV0
�d���X��������폜���Ƃ�
13 �F���J�����������F04/09/01 23:30 ID:mKBlMSKW
���s������폜�����
14 �F���J�����������F04/09/02 13:22 ID:mquKVayQ
Qrio�͊��ɑ���Ȃ����������H�H�H����܂��������ł����Ă�̂��H
15 �F���J�����������F04/09/02 15:53 ID:qgVBb7Mb
����Ȃ̑����Ă邱�ƂɂȂ��ĂȂ���
16 �F���J�����������F04/09/02 18:27 ID:Eh2Khtbg
�������ȁA�����������E�ɂԂ�Ė����̂œ����s(���s)�����A�܂����N
�l�^�����玟�Ɋ��҂��܂��傤��B
ttp://pc.watch.impress.co.jp/docs/2003/1218/sony.htm
�l�^�����玟�Ɋ��҂��܂��傤��B
ttp://pc.watch.impress.co.jp/docs/2003/1218/sony.htm
17 �F���J�����������F04/09/03 07:23 ID:jdSBTu7w
http://www.spunkysheets.com/galleries/movie23a/movie1.mpg
http://www.spunkysheets.com/galleries/movie23a/movie2.mpg
http://www.spunkysheets.com/galleries/movie23a/movie3.mpg
http://www.spunkysheets.com/galleries/movie23a/movie4.mpg
http://www.spunkysheets.com/galleries/movie38c/movie1.mpg
http://www.spunkysheets.com/galleries/movie38c/movie2.mpg
http://www.spunkysheets.com/galleries/movie38c/movie3.mpg
http://www.spunkysheets.com/galleries/movie38c/movie4.mpg
http://www.spunkysheets.com/galleries/movie33/movie1.mpg
http://www.spunkysheets.com/galleries/movie33/movie2.mpg
http://www.spunkysheets.com/galleries/movie33/movie3.mpg
http://www.spunkysheets.com/galleries/movie33/movie4.mpg
http://www.spunkysheets.com/galleries/movie47/movie1.mpg
http://www.spunkysheets.com/galleries/movie47/movie2.mpg
http://www.spunkysheets.com/galleries/movie47/movie3.mpg
http://www.spunkysheets.com/galleries/movie47/movie4.mpg
http://www.spunkysheets.com/galleries/movie26/movie1.mpg
http://www.spunkysheets.com/galleries/movie26/movie2.mpg
http://www.spunkysheets.com/galleries/movie26/movie3.mpg
http://www.spunkysheets.com/galleries/movie26/movie4.mpg
http://www.spunkysheets.com/galleries/movie78/movie1.mpg
http://www.spunkysheets.com/galleries/movie78/movie2.mpg
http://www.spunkysheets.com/galleries/movie78/movie3.mpg
http://www.spunkysheets.com/galleries/movie78/movie4.mpg
http://www.spunkysheets.com/galleries/movie23a/movie2.mpg
http://www.spunkysheets.com/galleries/movie23a/movie3.mpg
http://www.spunkysheets.com/galleries/movie23a/movie4.mpg
http://www.spunkysheets.com/galleries/movie38c/movie1.mpg
http://www.spunkysheets.com/galleries/movie38c/movie2.mpg
http://www.spunkysheets.com/galleries/movie38c/movie3.mpg
http://www.spunkysheets.com/galleries/movie38c/movie4.mpg
http://www.spunkysheets.com/galleries/movie33/movie1.mpg
http://www.spunkysheets.com/galleries/movie33/movie2.mpg
http://www.spunkysheets.com/galleries/movie33/movie3.mpg
http://www.spunkysheets.com/galleries/movie33/movie4.mpg
http://www.spunkysheets.com/galleries/movie47/movie1.mpg
http://www.spunkysheets.com/galleries/movie47/movie2.mpg
http://www.spunkysheets.com/galleries/movie47/movie3.mpg
http://www.spunkysheets.com/galleries/movie47/movie4.mpg
http://www.spunkysheets.com/galleries/movie26/movie1.mpg
http://www.spunkysheets.com/galleries/movie26/movie2.mpg
http://www.spunkysheets.com/galleries/movie26/movie3.mpg
http://www.spunkysheets.com/galleries/movie26/movie4.mpg
http://www.spunkysheets.com/galleries/movie78/movie1.mpg
http://www.spunkysheets.com/galleries/movie78/movie2.mpg
http://www.spunkysheets.com/galleries/movie78/movie3.mpg
http://www.spunkysheets.com/galleries/movie78/movie4.mpg
18 �F���J�����������F04/09/04 16:11 ID:bL3qm4S8
��`�Ƃ��Ă̓��s�ƌ����̂�
�l�Ԃ̗l�ɒn�ʂ��璼��������Ԃ���̑��s�Ȃ̂�
���̓����̗l�ɔ��������͘r��̑S�̂Ńo�����X�������
��Ԃ���̑��s�Ȃ̂��ɂ���ċZ�p�I�ɂ͉_�D�̍��ɂȂ�Ǝv���E�E�E�B
���R�A�O�҂̕���������낤�E�E�E�B
�l�Ԃ̑̌^���Đ����̗��j�̒��ł��ɂ߂ċH�ȗ�Ȃ�ȁE�E�E�B
�d�͂̉e���������Ɏ�n�\�ɒu���ċɂ߂đ傫���ďd�ʂ̗L��
�����Ȃ̂ɕ��i�̐����p�����|��Ă�������O�Ȃ��炢�ɕs����
�ɂ܂�Ȃ��̂͐l�Ԃ��炢���낤�E�E�E�B
�l�Ԃ̗l�ɒn�ʂ��璼��������Ԃ���̑��s�Ȃ̂�
���̓����̗l�ɔ��������͘r��̑S�̂Ńo�����X�������
��Ԃ���̑��s�Ȃ̂��ɂ���ċZ�p�I�ɂ͉_�D�̍��ɂȂ�Ǝv���E�E�E�B
���R�A�O�҂̕���������낤�E�E�E�B
�l�Ԃ̑̌^���Đ����̗��j�̒��ł��ɂ߂ċH�ȗ�Ȃ�ȁE�E�E�B
�d�͂̉e���������Ɏ�n�\�ɒu���ċɂ߂đ傫���ďd�ʂ̗L��
�����Ȃ̂ɕ��i�̐����p�����|��Ă�������O�Ȃ��炢�ɕs����
�ɂ܂�Ȃ��̂͐l�Ԃ��炢���낤�E�E�E�B
19 �F�A���p�c�ԑc�F04/09/04 22:54 ID:52DVv6qk
�������A�l�^�����ėp�ł���B�ƌ��������B
20 �F���J�����������F04/09/05 12:52 ID:qn7Tk4Hb
�����Ă���˂����
21 �F���J�����������F04/09/05 22:08 ID:4JBpTvpd
�]�ԂƂ��͓]��
22 �F���J�����������F04/09/05 22:09 ID:4JBpTvpd
>>�P�U
���������E�ɂԂ�Ė����̂œ����s(���s)
�Ȃ悭�킩��u�Ñ��s�v�Ȃ�Ă̂����݂���Ƃł��v���Ă�̂��H
���������E�ɂԂ�Ė����̂œ����s(���s)
�Ȃ悭�킩��u�Ñ��s�v�Ȃ�Ă̂����݂���Ƃł��v���Ă�̂��H
23 �F���J�����������F04/09/06 01:50 ID:8x/qFwRU
24 �F���J�����������F04/09/06 18:16 ID:vtbiQMLE
�A�����J�Ȃ�S�ʓI�Ƀ��f�B�A�ɘI�o����B
���{�͊g�U���Ďp��������B�������̈Ⴂ�B
���{�͊g�U���Ďp��������B�������̈Ⴂ�B
25 �F���J�����������F04/09/06 23:59 ID:Rz0W0PN0
>23
�ق�Ƃɂ킩���ĂȂ��̂�
���͊w���l�����Ȃ����s�Ȃ��݂���킯�Ȃ�����B
���Ɠ����s�ł��������E�ɓ����̂͂������ʂ̂��Ƃ�
�ق�Ƃɂ킩���ĂȂ��̂�
���͊w���l�����Ȃ����s�Ȃ��݂���킯�Ȃ�����B
���Ɠ����s�ł��������E�ɓ����̂͂������ʂ̂��Ƃ�
26 �F���J�����������F04/09/10 01:42 ID:vCsD4hK5
>>25
('A`)Ɂuttp://www.google.co.jp/search?hl=ja&ie=UTF-8&q=%E9%9D%99%E6%AD%A9%E8%A1%8C&lr=�v
�Õ��s�����s���ČĂѕ��ɓ��͊w�]�X�͊W�����Ǝv�����B
�����
���������Ȃ��Ȃ�Γ����s�@��
�����s�Ȃ�Ό��������Ȃ��@��
�Ӗ����Ⴄ�������Ă邩�H
('A`)Ɂuttp://www.google.co.jp/search?hl=ja&ie=UTF-8&q=%E9%9D%99%E6%AD%A9%E8%A1%8C&lr=�v
�Õ��s�����s���ČĂѕ��ɓ��͊w�]�X�͊W�����Ǝv�����B
�����
���������Ȃ��Ȃ�Γ����s�@��
�����s�Ȃ�Ό��������Ȃ��@��
�Ӗ����Ⴄ�������Ă邩�H
27 �F���J�����������F04/09/10 02:38 ID:jph7XZK0
�����͋@������������}�W���X���邼�B
������^���͐�(=�×͊w)�I�Ȏ��ۂ����ł͂Ȃ���(=���͊w)�I�Ȏ��ۂ��܂܂�Ă���B
���������x�����邱�Ƃœ��͊w�I�ȑ��ʂ��Ȃ����̂Ƌߎ����ĉ^�����v�悷�邱�Ƃ��ł���B
���̐ÓI�ȑ��ʂ����ɒ��ڂ��Ă�������悤�Ɍv�悳�ꂽ���s���Õ��s���B
�ÓI�Ɍv�悳�ꂽ�^���͓��I�ȉe���������ł������n�̎��萔�Ɉˑ����Ȃ��B
�ʒu�����l�����đ��x�Ƃ������x�Ƃ����������͖̂��������Ⴄ�̂��B
�����瓮����ǂꂾ���x�����Ă��o�����X���������ꂽ��Ԃ������̂��B
�Ԃ����Ⴏ����̓r���ŐÎ~���Ă����S�Ƀo�����X�����Ă���B
�Õ��s�Ƃ͂����������̂��B
����A�����s�́A���͊w�I�ȑ��ʂ����悤�Ɍv�悳���B
���{�b�g�̂��ꂼ��̕��ʂɂ��Ĉʒu�����łȂ����̑��x������x���l������̂��B
��������Ɠ��R�����͂Ƃ����[�����g���l�����邱�ƂɂȂ�B
�Ȃ̂ŁA����𑁂�������x�������肷��Ɖ^���͌v�悩��O��Ĕj�]�ɂ����肩�˂Ȃ��B
�ȏオ�����s�ƐÕ��s�̌����Ȓ�`���B
>26��google�Ō��������y�[�W�̂������ɏ�����Ă���Õ��s�̐�����
���������O���f�l�ɉ������̂��߂�ǂ���������
�T�^�I�ȗ�������Đ������Ă��邾�����B�i���{�I�ɊԈ���Ă�̂����������j
���āA���s�̏ꍇ���B���s����ɂ͗��r���n�ʂ��痣��đ̑S�̂���
���鎞�������݂���B
���̂Ƃ����{�b�g�̉^���͗��������Ƃ��̊����Ɏx�z�����B
����͐×͊w�����ł͎�舵���Ȃ����ۂŁA�ǂ����Ă����I�Ȏ��ۂ��l��������Ȃ��B
�����瓮���s�ɑ���Õ��s�̂悤�ȈӖ��Łu�Ñ��s�v�Ƃ������̂͑��݂��Ȃ��B
�܂��A���s�����͊w�I�Ȏ��ۂł��邱�Ƃ͎����Ȃ̂ł킴�킴�u�����s�v�ƌ����K�v�͂Ȃ��B
���Ɍ����]�X�����B
�����s�ŕ������E�ɓ��������s�͑��݂�����B
�܂��Õ��s�ł��������E�ɓ������Ȃ����s�͑��݂�����B�̂�
�����������Ȃ��Ȃ�Γ����s�@��
�������s�Ȃ�Ό��������Ȃ��@��
�����Ԉ���Ă�B
������^���͐�(=�×͊w)�I�Ȏ��ۂ����ł͂Ȃ���(=���͊w)�I�Ȏ��ۂ��܂܂�Ă���B
���������x�����邱�Ƃœ��͊w�I�ȑ��ʂ��Ȃ����̂Ƌߎ����ĉ^�����v�悷�邱�Ƃ��ł���B
���̐ÓI�ȑ��ʂ����ɒ��ڂ��Ă�������悤�Ɍv�悳�ꂽ���s���Õ��s���B
�ÓI�Ɍv�悳�ꂽ�^���͓��I�ȉe���������ł������n�̎��萔�Ɉˑ����Ȃ��B
�ʒu�����l�����đ��x�Ƃ������x�Ƃ����������͖̂��������Ⴄ�̂��B
�����瓮����ǂꂾ���x�����Ă��o�����X���������ꂽ��Ԃ������̂��B
�Ԃ����Ⴏ����̓r���ŐÎ~���Ă����S�Ƀo�����X�����Ă���B
�Õ��s�Ƃ͂����������̂��B
����A�����s�́A���͊w�I�ȑ��ʂ����悤�Ɍv�悳���B
���{�b�g�̂��ꂼ��̕��ʂɂ��Ĉʒu�����łȂ����̑��x������x���l������̂��B
��������Ɠ��R�����͂Ƃ����[�����g���l�����邱�ƂɂȂ�B
�Ȃ̂ŁA����𑁂�������x�������肷��Ɖ^���͌v�悩��O��Ĕj�]�ɂ����肩�˂Ȃ��B
�ȏオ�����s�ƐÕ��s�̌����Ȓ�`���B
>26��google�Ō��������y�[�W�̂������ɏ�����Ă���Õ��s�̐�����
���������O���f�l�ɉ������̂��߂�ǂ���������
�T�^�I�ȗ�������Đ������Ă��邾�����B�i���{�I�ɊԈ���Ă�̂����������j
���āA���s�̏ꍇ���B���s����ɂ͗��r���n�ʂ��痣��đ̑S�̂���
���鎞�������݂���B
���̂Ƃ����{�b�g�̉^���͗��������Ƃ��̊����Ɏx�z�����B
����͐×͊w�����ł͎�舵���Ȃ����ۂŁA�ǂ����Ă����I�Ȏ��ۂ��l��������Ȃ��B
�����瓮���s�ɑ���Õ��s�̂悤�ȈӖ��Łu�Ñ��s�v�Ƃ������̂͑��݂��Ȃ��B
�܂��A���s�����͊w�I�Ȏ��ۂł��邱�Ƃ͎����Ȃ̂ł킴�킴�u�����s�v�ƌ����K�v�͂Ȃ��B
���Ɍ����]�X�����B
�����s�ŕ������E�ɓ��������s�͑��݂�����B
�܂��Õ��s�ł��������E�ɓ������Ȃ����s�͑��݂�����B�̂�
�����������Ȃ��Ȃ�Γ����s�@��
�������s�Ȃ�Ό��������Ȃ��@��
�����Ԉ���Ă�B
28 �F���J�����������F04/09/10 04:08 ID:X7TPoO79
�ꑫ���s�X���͂Ȃ����H
29 �F���J�����������F04/09/10 21:05:37 ID:SlJaRR9o
>>27
�Ȃ�قǂ��A���̒��Ŗϑz���Ă݂��牽�ƂȂ������ł����B
�Ȃ�قǂ��A���̒��Ŗϑz���Ă݂��牽�ƂȂ������ł����B
>>27
���₻��͗������Ă���
���{�I��>>22����ǂ��Ă��l��_|�P|��
('A`)����႟�u�Ñ��s�v�Ȃ��݂��܂�����
>�܂��Õ��s�ł��������E�ɓ������Ȃ����s�͑��݂�����B�̂�
���̗�����������z�ƒn�ʂɋz���t���z���l�����ĂȂ�����('A`)
�����ʂ��
���₻��͗������Ă���
���{�I��>>22����ǂ��Ă��l��_|�P|��
('A`)����႟�u�Ñ��s�v�Ȃ��݂��܂�����
>�܂��Õ��s�ł��������E�ɓ������Ȃ����s�͑��݂�����B�̂�
���̗�����������z�ƒn�ʂɋz���t���z���l�����ĂȂ�����('A`)
�����ʂ��
31 �F���J�����������F04/09/11 19:50:55 ID:MN6SUixJ
�`���̋Z�p�����p���č��Ȃ������c
32 �F���J�����������F04/09/19 00:53:17 ID:dOVQHDyi
�ێ炠��
33 �F���J�����������F04/09/26 21:16:17 ID:Cki03BZr
sage
34 �F���J�����������F04/09/27 00:28:55 ID:xo0f1W70
�؍��ŃX�y�[�X�K���_��V�@�@����Q�O�O�P�N
http://akazuking.ddo.jp/src/gontz0136.mpg
����������p�N����낤�ȁcorz��
http://akazuking.ddo.jp/src/gontz0207.mpg
http://akazuking.ddo.jp/src/gontz0136.mpg
����������p�N����낤�ȁcorz��
http://akazuking.ddo.jp/src/gontz0207.mpg
35 �F���J�����������F04/10/19 21:29:39 ID:obCBDSNL
>>31
��������Ǝv���B�������̃o�l�ɂȂ��Ă���悤�ȋ��Z�p�`���Ȃ�ˁB
MIT�̂RD�z�b�s���O���{�ɋ߂����̂ɂȂ邪�B�����A���̏ꍇ���s���ˁE�E�E�E�B
��������Ǝv���B�������̃o�l�ɂȂ��Ă���悤�ȋ��Z�p�`���Ȃ�ˁB
MIT�̂RD�z�b�s���O���{�ɋ߂����̂ɂȂ邪�B�����A���̏ꍇ���s���ˁE�E�E�E�B
36 �F���J�����������F04/10/19 22:37:45 ID:EXZfP/5f
�ʏ�̂R�{�����`�r�h�l�n�������Ă���悤����...
37 �F���J�����������F04/10/20 06:13:03 ID:cPxx4zjK
����͋C�̂���
38 �F���J�����������F04/10/20 18:41:12 ID:+KdclzyF
����Ȃ��{���ŏ\���ȋC�����܂����E�E�E
39 �F���J�����������F04/11/08 18:19:32 ID:A5fIVd/G
���{�b�g�����䂤���Ō����̂ł����A
�����Ă���悤�ȃ��{�b�g�Ƃ����������B
����Ƃ��B����ǂ��Ŕ����Ă�낤�B
�����Ă���悤�ȃ��{�b�g�Ƃ����������B
����Ƃ��B����ǂ��Ŕ����Ă�낤�B
40 �F���J�����������F04/11/09 10:36:59 ID:deHyfyKa
>>39
Robo-One Special �̂��Ƃ���ˁB�i�s���ĂȂ�����NHK�ɉf���Ă܂����j
�唼�͎���B6�̂��炢�����ăf�����Ă��̂���������KHR-1���ȁB
Robo-One Special �̂��Ƃ���ˁB�i�s���ĂȂ�����NHK�ɉf���Ă܂����j
�唼�͎���B6�̂��炢�����ăf�����Ă��̂���������KHR-1���ȁB
41 �F���J�����������F04/11/10 01:05:36 ID:aIfU7pw0
����͐i�������
42 �F���J�����������F04/11/10 06:28:30 ID:5udvWjG4
����H
�܂�X�s�[�h���ق����̂��ȁB
�Ȃ���[���[�_�b�V������B
�܂�X�s�[�h���ق����̂��ȁB
�Ȃ���[���[�_�b�V������B
43 �F���J�����������F04/11/10 11:28:45 ID:RyVcrBAn
>>42
����H
http://www-robot.mes.titech.ac.jp/robot/walking/rollerwalker/rollerwalker.html
http://www-robot.mes.titech.ac.jp/movies/Rollerwalker_w_3.mpg
����H
http://www-robot.mes.titech.ac.jp/robot/walking/rollerwalker/rollerwalker.html
http://www-robot.mes.titech.ac.jp/movies/Rollerwalker_w_3.mpg
44 �F�`���������}�F04/11/10 17:34:34 ID:psSr0HGs
�Ⴄ��A����̓G���y�[�W
45 �F���J�����������F04/11/10 19:42:01 ID:f0Ynvztd
�@�G�����Ɗ��҂��Ă݂��瓌�H��̃��{�b�g�����
46 �F���J�����������F04/11/14 19:26:06 ID:4mbxilus
>>27
�����͋@������������}�W���X���邼�B
�������`�������B
�����Ă��Ȃ��͑����Ă���̂��H�G�I
�����̒�`����u�����Ă��Ȃ��������Ă���v�Ƃ���
�̂��������B
�����͋@������������}�W���X���邼�B
�������`�������B
�����Ă��Ȃ��͑����Ă���̂��H�G�I
�����̒�`����u�����Ă��Ȃ��������Ă���v�Ƃ���
�̂��������B
47 �F���J�����������F04/11/14 20:57:10 ID:BUrzZ3Ny
>46
����ȊO�ɍ����I�ȁu����v�̒�`������Ȃ為�Е������Ă���
����ȊO�ɍ����I�ȁu����v�̒�`������Ȃ為�Е������Ă���
48 �F���J�����������F04/11/15 01:34:09 ID:3zEWqR5t
>>47
�����̒�`���ǂ��u����v�ɍ����I�Ȃ̂��������Ă���I
�����̒�`�́u�����Ă��Ȃ��v��`����D
�����Ă��Ȃ��������Ă���
�Ȃ̂����H
�����łȂ���ΐA�����H
�k�łȂ���Γ삩�H
�ǂ��܂Ŗт���������͂��Ȃ̂��H
�����̒�`���ǂ��u����v�ɍ����I�Ȃ̂��������Ă���I
�����̒�`�́u�����Ă��Ȃ��v��`����D
�����Ă��Ȃ��������Ă���
�Ȃ̂����H
�����łȂ���ΐA�����H
�k�łȂ���Γ삩�H
�ǂ��܂Ŗт���������͂��Ȃ̂��H
49 �F���J�����������F04/11/15 03:02:51 ID:nlCSQrL3
�������̒�`�́u�����Ă��Ȃ��v��`����D
�������Ă��Ȃ��������Ă���
���Ȃ̂����H
��r�̈ړ��ɂ����Č��݂ɋr�ڒn���ړ����铮��ł����
�������Ă��Ȃ��������Ă���
���Ƃ�������B�ق��ɂȂ���ˁB
�������łȂ���ΐA�����H
�����w�I���ޏ�A�����E�ɕ��їނ������̂͐A���E�A�ہA���������A���l���E������B
���k�łȂ���Γ삩�H
�ɂɂ��Ę_����̂ł���Ζk�łȂ���Γ�B
���ǂ��܂Ŗт���������͂��Ȃ̂��H
�����ŋC�t���Ă��邩�͒m��Ȃ������̎���͔��ɏd�v�Ȗ����������Ă���B
�u���x���v�A�܂�ʓI��臒l�ɂ���Ă̂ݔ��f�\�Ȏ��ۂ̕��ނ�
�����������I�ɒ�`���邱�Ƃ������ˁB�B
���r�̓����ڒn��ޗ��Ƃ�����s�E���s�̕��ނ�
����̂��߂̃p���_�C���������ł������莿�I�ɕ������̂ɑ�
����ȊO�̗v�f(���Ƃ��Έړ����x�Ƃ�)�͗ʓI�ȕω�(���Ƃ����[�^�̏o�͂Ƃ�)
���Ȃ߂炩�ɑ������Ă���������͒B�������B
���̂��߁A�����Ō����Ƃ���̕��s�ȊO�����s�Ƃ��邱�Ƃ��Z�p�ʂ���̕��ނƂ���
�����Ƃ������I�ƍl�����Ă���킯���B
�������Ă��Ȃ��������Ă���
���Ȃ̂����H
��r�̈ړ��ɂ����Č��݂ɋr�ڒn���ړ����铮��ł����
�������Ă��Ȃ��������Ă���
���Ƃ�������B�ق��ɂȂ���ˁB
�������łȂ���ΐA�����H
�����w�I���ޏ�A�����E�ɕ��їނ������̂͐A���E�A�ہA���������A���l���E������B
���k�łȂ���Γ삩�H
�ɂɂ��Ę_����̂ł���Ζk�łȂ���Γ�B
���ǂ��܂Ŗт���������͂��Ȃ̂��H
�����ŋC�t���Ă��邩�͒m��Ȃ������̎���͔��ɏd�v�Ȗ����������Ă���B
�u���x���v�A�܂�ʓI��臒l�ɂ���Ă̂ݔ��f�\�Ȏ��ۂ̕��ނ�
�����������I�ɒ�`���邱�Ƃ������ˁB�B
���r�̓����ڒn��ޗ��Ƃ�����s�E���s�̕��ނ�
����̂��߂̃p���_�C���������ł������莿�I�ɕ������̂ɑ�
����ȊO�̗v�f(���Ƃ��Έړ����x�Ƃ�)�͗ʓI�ȕω�(���Ƃ����[�^�̏o�͂Ƃ�)
���Ȃ߂炩�ɑ������Ă���������͒B�������B
���̂��߁A�����Ō����Ƃ���̕��s�ȊO�����s�Ƃ��邱�Ƃ��Z�p�ʂ���̕��ނƂ���
�����Ƃ������I�ƍl�����Ă���킯���B
50 �F���J�����������F04/11/15 22:45:22 ID:3zEWqR5t
>>49
>��r�̈ړ��ɂ����Č��݂ɋr�ڒn���ړ����铮��ł����
>>�����Ă��Ȃ��������Ă���
>���Ƃ�������B�ق��ɂȂ���ˁB
����͎v�����݂ł���D
�K�v�������Q�o�Ă�����ˁB
�P�D���݂ɑ���ڒn����
�Q�D�������ڒn���Ă��Ȃ��u�Ԃ�����
�ł����ꂾ���ł͂�������Ƃ����������Ă������͂Ȃ���ˁB
�݂�ȁA�Ȃ��܂��ꂽ�悤�ȋC�ɂȂ��Ă���̂��킩��Ȃ����ȁH
>>�k�łȂ���Γ삩�H
>�ɂɂ��Ę_����̂ł���Ζk�łȂ���Γ�B
�X�y�V�����P�[�X�ՓI�ɘ_����͍̂��\�t�̏퓅��i���ˁB
>�u���x���v�A�܂�ʓI��臒l�ɂ���Ă̂ݔ��f�\�Ȏ��ۂ̕��ނ�
>�����������I�ɒ�`���邱�Ƃ������ˁB�B
���ꂪ�t�@�W�[���_����ˁB
�t�@�W�[����͂������䗝�_���Ɣ��_����낤���ǂ��B
>���r�̓����ڒn��ޗ��Ƃ�����s�E���s�̕��ނ�
>����̂��߂̃p���_�C���������ł������莿�I�ɕ������̂ɑ�
>����ȊO�̗v�f(���Ƃ��Έړ����x�Ƃ�)�͗ʓI�ȕω�(���Ƃ����[�^�̏o�͂Ƃ�)
>���Ȃ߂炩�ɑ������Ă���������͒B�������B
�����玩�́u�������v�Ƃ����Z�p�̓z�b�s���O���{�b�g�Ɠ����ł���H
�Ɗ�����킯���B
S�Ђ�S�����������Ƃ����̂́A
����I�ɂ͉ߋ��̋Z�p���Ȃ����Ă��邾���B
�ɂ݂���킯�B
>���̂��߁A�����Ō����Ƃ���̕��s�ȊO�����s�Ƃ��邱�Ƃ��Z�p�ʂ���̕��ނƂ���
>�����Ƃ������I�ƍl�����Ă���킯���B
21���I�ɂ͂����Ɛi��`�����߂���킯���B
�N�����Ă������Ă���Ɗ������鉽���B
���������Ă��������Ȃ��U�肵�Ă��邾�낤���猾�����Ⴄ�ƁA
�u�����ꂩ�͒B�������B�v�ƌ����Ă����A
�ړ����x����Ȃ����ȁH
�����Ă�����x���u����v���ĂȂ���������ˁH
���������Ă�����u�G�l���M�[������Ȃ��B�v�Ƃ��A
�ǂ�����Ă������Ȃ����x�ňړ������Ƃ����A
�����Ă��Ȃ����݂ɂQ�����g�����ړ��Ƃ��āA
�����Ă���Ƒ����̐l�ɔF�߂�����Ȃ��́H
�����������̂��߂ɑ���̂����l���Ă݂�킩��ł���B
�����Ă���ƒx�����瑖���Ȃ��́H
����������葁���ړ����Ȃ����߂ɑ����Ă���l�����邾�낤���ǂˁB
���A�P�[�X�ՓI�ɋ��ق���͍̂��\�t�̏퓅��i�����炳�B
��߂Ƃ����ق��������Ǝv����B
>��r�̈ړ��ɂ����Č��݂ɋr�ڒn���ړ����铮��ł����
>>�����Ă��Ȃ��������Ă���
>���Ƃ�������B�ق��ɂȂ���ˁB
����͎v�����݂ł���D
�K�v�������Q�o�Ă�����ˁB
�P�D���݂ɑ���ڒn����
�Q�D�������ڒn���Ă��Ȃ��u�Ԃ�����
�ł����ꂾ���ł͂�������Ƃ����������Ă������͂Ȃ���ˁB
�݂�ȁA�Ȃ��܂��ꂽ�悤�ȋC�ɂȂ��Ă���̂��킩��Ȃ����ȁH
>>�k�łȂ���Γ삩�H
>�ɂɂ��Ę_����̂ł���Ζk�łȂ���Γ�B
�X�y�V�����P�[�X�ՓI�ɘ_����͍̂��\�t�̏퓅��i���ˁB
>�u���x���v�A�܂�ʓI��臒l�ɂ���Ă̂ݔ��f�\�Ȏ��ۂ̕��ނ�
>�����������I�ɒ�`���邱�Ƃ������ˁB�B
���ꂪ�t�@�W�[���_����ˁB
�t�@�W�[����͂������䗝�_���Ɣ��_����낤���ǂ��B
>���r�̓����ڒn��ޗ��Ƃ�����s�E���s�̕��ނ�
>����̂��߂̃p���_�C���������ł������莿�I�ɕ������̂ɑ�
>����ȊO�̗v�f(���Ƃ��Έړ����x�Ƃ�)�͗ʓI�ȕω�(���Ƃ����[�^�̏o�͂Ƃ�)
>���Ȃ߂炩�ɑ������Ă���������͒B�������B
�����玩�́u�������v�Ƃ����Z�p�̓z�b�s���O���{�b�g�Ɠ����ł���H
�Ɗ�����킯���B
S�Ђ�S�����������Ƃ����̂́A
����I�ɂ͉ߋ��̋Z�p���Ȃ����Ă��邾���B
�ɂ݂���킯�B
>���̂��߁A�����Ō����Ƃ���̕��s�ȊO�����s�Ƃ��邱�Ƃ��Z�p�ʂ���̕��ނƂ���
>�����Ƃ������I�ƍl�����Ă���킯���B
21���I�ɂ͂����Ɛi��`�����߂���킯���B
�N�����Ă������Ă���Ɗ������鉽���B
���������Ă��������Ȃ��U�肵�Ă��邾�낤���猾�����Ⴄ�ƁA
�u�����ꂩ�͒B�������B�v�ƌ����Ă����A
�ړ����x����Ȃ����ȁH
�����Ă�����x���u����v���ĂȂ���������ˁH
���������Ă�����u�G�l���M�[������Ȃ��B�v�Ƃ��A
�ǂ�����Ă������Ȃ����x�ňړ������Ƃ����A
�����Ă��Ȃ����݂ɂQ�����g�����ړ��Ƃ��āA
�����Ă���Ƒ����̐l�ɔF�߂�����Ȃ��́H
�����������̂��߂ɑ���̂����l���Ă݂�킩��ł���B
�����Ă���ƒx�����瑖���Ȃ��́H
����������葁���ړ����Ȃ����߂ɑ����Ă���l�����邾�낤���ǂˁB
���A�P�[�X�ՓI�ɋ��ق���͍̂��\�t�̏퓅��i�����炳�B
��߂Ƃ����ق��������Ǝv����B
51 �F���J�����������F04/11/16 00:06:26 ID:gU6qlKZl
>>50
�Ȃ�قǁA�Ȃ�炩�̌`�Ŏ��p�I�ȑ��s�Ƃ����łȂ����s�������킯�ł��ˁB
�\�j�[��Y�����͎̂��p�I�łȂ��Ƃ����Ӗ��ł͓��ӂł��B
���s�ɂ��Õ��s�Ɠ����s������悤�ɁA���s�ɂ��Ȃ�炩�̕����ڂ��c
���Ԃ�A���������m�����̒i�K���Ǝv���܂��B
�u�A���͐Ñ��s���A�E�`�͓̂����s���v�݂�����(^^;
���̕����ڂ̊���w�p�I�ɈӖ�������A�[���̓����₷�����̂ł����
����蒅����ł��傤�B
�Ƃ͂��������Ȃ蓮���s�������ł����킯�ł͂Ȃ��A�Õ��s����i�K�I�ɐi��
���Ă����ƍl����ΐÑ��s�H�ł�����Ȃ�̉��l��F�߂Ă����Ă�������
�v���܂���B
����莸��m(_ _)m
�Ȃ�قǁA�Ȃ�炩�̌`�Ŏ��p�I�ȑ��s�Ƃ����łȂ����s�������킯�ł��ˁB
�\�j�[��Y�����͎̂��p�I�łȂ��Ƃ����Ӗ��ł͓��ӂł��B
���s�ɂ��Õ��s�Ɠ����s������悤�ɁA���s�ɂ��Ȃ�炩�̕����ڂ��c
���Ԃ�A���������m�����̒i�K���Ǝv���܂��B
�u�A���͐Ñ��s���A�E�`�͓̂����s���v�݂�����(^^;
���̕����ڂ̊���w�p�I�ɈӖ�������A�[���̓����₷�����̂ł����
����蒅����ł��傤�B
�Ƃ͂��������Ȃ蓮���s�������ł����킯�ł͂Ȃ��A�Õ��s����i�K�I�ɐi��
���Ă����ƍl����ΐÑ��s�H�ł�����Ȃ�̉��l��F�߂Ă����Ă�������
�v���܂���B
����莸��m(_ _)m
52 �F���J�����������F04/11/16 00:22:22 ID:gU6qlKZl
�ʂ肷������łɁc
�Ñ��s���ď����Ɠ��͊w���l�����Ă��Ȃ��݂����ł�낵�������̂͂���܂����c
�Ƃ͂����A�ڏグ�^�����l����Ǝ��̈���Ŏ~�܂�Ɩ�����Ύ~�܂��悤�ȋC��
����̂ʼn��炩�̈Ӗ��ʼn����͈͓̔��Ɏ��܂��Ă����ł���i�Ȃ��̕��͂�(^^;�j
���V���Ɋg�����ꂽZMP�����n�\��n�̎x�����p�`�Ɏ��܂��Ă���Ƃ��A����Ȋ����H
�Ñ��s���ď����Ɠ��͊w���l�����Ă��Ȃ��݂����ł�낵�������̂͂���܂����c
�Ƃ͂����A�ڏグ�^�����l����Ǝ��̈���Ŏ~�܂�Ɩ�����Ύ~�܂��悤�ȋC��
����̂ʼn��炩�̈Ӗ��ʼn����͈͓̔��Ɏ��܂��Ă����ł���i�Ȃ��̕��͂�(^^;�j
���V���Ɋg�����ꂽZMP�����n�\��n�̎x�����p�`�Ɏ��܂��Ă���Ƃ��A����Ȋ����H
53 �F���\�t�Ă�肳�ꂽ���ǐe�ɔ��_���Ă݂�e�X�g�F04/11/16 01:31:45 ID:NcEgetHe
>>50
��>���Ƃ�������B�ق��ɂȂ���ˁB
������͎v�����݂ł���D
���Ⴀ�u�ق��v����Ă�����ĂB
���X�y�V�����P�[�X�ՓI�ɘ_����͍̂��\�t�̏퓅��i���ˁB
��`��_�������O������͖��炩�ɂ��ׂ��B
�Ȃ�ł�����ł����ՓI�ɘ_���悤�Ƃ���Ƃ킯���킩��Ȃ��Ȃ�
�����炨�܂�����́u����v�̒�`�ō������Ă��H
�����ꂪ�t�@�W�[���_����ˁB
���t�@�W�[����͂������䗝�_���Ɣ��_����낤���ǂ��B
�ʂɃt�@�W�[���̂ɓ�Ȃ������͂Ȃ���B
�ł��ˁA�t�@�W�[���_�͂Ȃ߂炩�ɐ�ւ�鎖�ۂ������̂Ɏg���́B
���s�Ƒ��s�̊Ԃɂ͖��炩�Ɏ��I�ȓ]��������B�����炱���Ńt�@�W�[�������o���͕̂s�K���B
�������玩�́u�������v�Ƃ����Z�p�̓z�b�s���O���{�b�g�Ɠ����ł���H�Ɗ�����킯���B
��S�Ђ�S�����������Ƃ����̂́A����I�ɂ͉ߋ��̋Z�p���Ȃ����Ă��邾���B�ɂ݂���킯�B
�Ȃɂ��u������v���͂킩��A�ߋ��ɑ��݂���z�b�s���O���{�b�g���Ă̂͑��s�͂ł��Ă�
���s���ł��Ȃ��u���s��p�@�v���ˁB������w���āu�����ł���H�v�Ƃ�����n�@�����ł����Ƃ��������Ȃ��Ȃ��B
�����������Ă��������Ȃ��U�肵�Ă��邾�낤���猾�����Ⴄ�ƁA
���u�����ꂩ�͒B�������B�v�ƌ����Ă����A�ړ����x����Ȃ����ȁH
���̂ˁB�������������C�����͂ƂĂ��悭�킩��́B�ł��ˁA���ꂾ�ƒ�`�ɂȂ��̂�B
�������Ă�����x���u����v���ĂȂ���������ˁH
���Ă����A���̈�a�����̂�����[�I�ɂ���킵�Ă���B���͂��������Ȃ��B
���Ƃ������̐l��20�L���̃R�[�X�������P�U�L�����炢�ŕ����Ƃ������肷��킯������
���ʂ̐l�̏�������f�R������ˁB
���Ⴀ����20�L���Ƃ��ŕ������{�b�g���ł����炻��́u�����āv����H
����������19�L���ő����Ă����炻��́u�����āv����̂��H
�u���s��葬����Α��s�v�u���s���x����Ε��s�v�Ȃ�Ē�`�͌���臒l�ˑ��̘b�ɂȂ�
����10�L��������ɉ����݂����ȉ��炩�̕ǂ������Ȃ�Ƃ������A
����ł͍����I��臒l�͌��߂��Ȃ���ˁH
>���������Ă�����u�G�l���M�[������Ȃ��B�v�Ƃ��A�ǂ�����Ă������Ȃ����x�ňړ������Ƃ����A
�y���W���M���O�Ȃ͂�������Ȃ��Ǝv����B�ł�������w���āu�����Ă�v�ƌ�������_���H
���������Ƃ��̂��߂ɓ��{��ɂ́u�������v���́u������v���֗̕��Ȍ��t������B
�ł��u������v���u�����Ă��Ȃ��̂��H�v�Ƃ��������Ȃ��ƂȂ���ˁB
�������������̂��߂ɑ���̂����l���Ă݂�킩��ł���B
�������Ă���ƒx�����瑖���Ȃ��́H
�ŏI�I�ȖڕW���B������Ȃ���������Ƃ����đ��s�ł͂Ȃ��Ƃ������Ƃɂ͂Ȃ�Ȃ���B
�S�_�[�h�̉ԉ��F���܂ōs���Ȃ���������Ƃ����āA��������P�b�g�ƌ������Ⴞ�߂����H
�����A�P�[�X�ՓI�ɋ��ق���͍̂��\�t�̏퓅��i�����炳�B
���������ă��b�e���œ����Ȃ��ō����I�Ȓ�`�������ƒ�Ă��Ă�����B
�����Ƃ�^�ʖڂɔ��_���Ă���炳
>>51
>�\�j�[��Y�����͎̂��p�I�łȂ��Ƃ����Ӗ��ł͓��ӂł��B
������p�I�łȂ����Ă͉̂������ӂ��Ƃ��B����������Ƃق��ɂ��F�X�A�������ǁB
��>���Ƃ�������B�ق��ɂȂ���ˁB
������͎v�����݂ł���D
���Ⴀ�u�ق��v����Ă�����ĂB
���X�y�V�����P�[�X�ՓI�ɘ_����͍̂��\�t�̏퓅��i���ˁB
��`��_�������O������͖��炩�ɂ��ׂ��B
�Ȃ�ł�����ł����ՓI�ɘ_���悤�Ƃ���Ƃ킯���킩��Ȃ��Ȃ�
�����炨�܂�����́u����v�̒�`�ō������Ă��H
�����ꂪ�t�@�W�[���_����ˁB
���t�@�W�[����͂������䗝�_���Ɣ��_����낤���ǂ��B
�ʂɃt�@�W�[���̂ɓ�Ȃ������͂Ȃ���B
�ł��ˁA�t�@�W�[���_�͂Ȃ߂炩�ɐ�ւ�鎖�ۂ������̂Ɏg���́B
���s�Ƒ��s�̊Ԃɂ͖��炩�Ɏ��I�ȓ]��������B�����炱���Ńt�@�W�[�������o���͕̂s�K���B
�������玩�́u�������v�Ƃ����Z�p�̓z�b�s���O���{�b�g�Ɠ����ł���H�Ɗ�����킯���B
��S�Ђ�S�����������Ƃ����̂́A����I�ɂ͉ߋ��̋Z�p���Ȃ����Ă��邾���B�ɂ݂���킯�B
�Ȃɂ��u������v���͂킩��A�ߋ��ɑ��݂���z�b�s���O���{�b�g���Ă̂͑��s�͂ł��Ă�
���s���ł��Ȃ��u���s��p�@�v���ˁB������w���āu�����ł���H�v�Ƃ�����n�@�����ł����Ƃ��������Ȃ��Ȃ��B
�����������Ă��������Ȃ��U�肵�Ă��邾�낤���猾�����Ⴄ�ƁA
���u�����ꂩ�͒B�������B�v�ƌ����Ă����A�ړ����x����Ȃ����ȁH
���̂ˁB�������������C�����͂ƂĂ��悭�킩��́B�ł��ˁA���ꂾ�ƒ�`�ɂȂ��̂�B
�������Ă�����x���u����v���ĂȂ���������ˁH
���Ă����A���̈�a�����̂�����[�I�ɂ���킵�Ă���B���͂��������Ȃ��B
���Ƃ������̐l��20�L���̃R�[�X�������P�U�L�����炢�ŕ����Ƃ������肷��킯������
���ʂ̐l�̏�������f�R������ˁB
���Ⴀ����20�L���Ƃ��ŕ������{�b�g���ł����炻��́u�����āv����H
����������19�L���ő����Ă����炻��́u�����āv����̂��H
�u���s��葬����Α��s�v�u���s���x����Ε��s�v�Ȃ�Ē�`�͌���臒l�ˑ��̘b�ɂȂ�
����10�L��������ɉ����݂����ȉ��炩�̕ǂ������Ȃ�Ƃ������A
����ł͍����I��臒l�͌��߂��Ȃ���ˁH
>���������Ă�����u�G�l���M�[������Ȃ��B�v�Ƃ��A�ǂ�����Ă������Ȃ����x�ňړ������Ƃ����A
�y���W���M���O�Ȃ͂�������Ȃ��Ǝv����B�ł�������w���āu�����Ă�v�ƌ�������_���H
���������Ƃ��̂��߂ɓ��{��ɂ́u�������v���́u������v���֗̕��Ȍ��t������B
�ł��u������v���u�����Ă��Ȃ��̂��H�v�Ƃ��������Ȃ��ƂȂ���ˁB
�������������̂��߂ɑ���̂����l���Ă݂�킩��ł���B
�������Ă���ƒx�����瑖���Ȃ��́H
�ŏI�I�ȖڕW���B������Ȃ���������Ƃ����đ��s�ł͂Ȃ��Ƃ������Ƃɂ͂Ȃ�Ȃ���B
�S�_�[�h�̉ԉ��F���܂ōs���Ȃ���������Ƃ����āA��������P�b�g�ƌ������Ⴞ�߂����H
�����A�P�[�X�ՓI�ɋ��ق���͍̂��\�t�̏퓅��i�����炳�B
���������ă��b�e���œ����Ȃ��ō����I�Ȓ�`�������ƒ�Ă��Ă�����B
�����Ƃ�^�ʖڂɔ��_���Ă���炳
>>51
>�\�j�[��Y�����͎̂��p�I�łȂ��Ƃ����Ӗ��ł͓��ӂł��B
������p�I�łȂ����Ă͉̂������ӂ��Ƃ��B����������Ƃق��ɂ��F�X�A�������ǁB
54 �F���J�����������F04/11/17 00:47:26 ID:2CIQenZk
>>53
51, 52����ɂ͌��t���ʂ��Ă���悤�����D�D�D
���̐l�ɂ̓��X���Ă����������ł��Ȃ��ł낤���ǁB
>���s�Ƒ��s�̊Ԃɂ͖��炩�Ɏ��I�ȓ]��������B�����炱���Ńt�@�W�[�������o���͕̂s�K���B
�����������ɕ����Ă���Ƃ��������ł́A
���s�Ƃ����Ă��钆�ɖ��m�ȑ��s�ƁA���s�Ƃ����Ȃ��悤�ȑ��s��������Ă������ƁB
>�ߋ��ɑ��݂���z�b�s���O���{�b�g���Ă̂͑��s�͂ł��Ă�
>���s���ł��Ȃ��u���s��p�@�v���ˁB������w���āu�����ł���H�v�Ƃ�����n�@�����ł����Ƃ��������Ȃ��Ȃ��B
������C�u����v�������ɂ́u�����v���K�v�����Ă����Ă���킯�B
�����Ȃ����{�b�g�ɑ���͂Ȃ��B
�����邩�炱�������B
>�u���s��葬����Α��s�v�u���s���x����Ε��s�v�Ȃ�Ē�`�͌���臒l�ˑ��̘b�ɂȂ�
�K�v���������Ȃ��Ƃ��R������Ă����Ă�����B
�P�D���������݂ɒ��n���邱��
�Q�D�����������ɕ��サ�Ă���u�Ԃ����邱��
�R�D���̑��x�ŕ��s�ł��Ȃ����C���s������G�l���M�[������Ȃ�����
>�ŏI�I�ȖڕW���B������Ȃ���������Ƃ����đ��s�ł͂Ȃ��Ƃ������Ƃɂ͂Ȃ�Ȃ���B
>�S�_�[�h�̉ԉ��F���܂ōs���Ȃ���������Ƃ����āA��������P�b�g�ƌ������Ⴞ�߂����H
���Ƃ̂��肩������B
�u�r���̋@�B�l�`��������葁�����������Ĉړ��ł��Ȃ�����Ƃ����āA
��������{�b�g�ƌ������Ⴞ�߂����H�v
�Ƃ�����������Ă��邾�����ˁB
�ŏI�I�ȖڕW���u�F�����s�v�Ƃ�����A
�u���P�b�g�v����Ȃ��āu�F���D�v�Ɠ����ׂ��ŁA
���������炠����u�F���D�v�ƌ������Ⴞ�߂ł��傤�B
51, 52����ɂ͌��t���ʂ��Ă���悤�����D�D�D
���̐l�ɂ̓��X���Ă����������ł��Ȃ��ł낤���ǁB
>���s�Ƒ��s�̊Ԃɂ͖��炩�Ɏ��I�ȓ]��������B�����炱���Ńt�@�W�[�������o���͕̂s�K���B
�����������ɕ����Ă���Ƃ��������ł́A
���s�Ƃ����Ă��钆�ɖ��m�ȑ��s�ƁA���s�Ƃ����Ȃ��悤�ȑ��s��������Ă������ƁB
>�ߋ��ɑ��݂���z�b�s���O���{�b�g���Ă̂͑��s�͂ł��Ă�
>���s���ł��Ȃ��u���s��p�@�v���ˁB������w���āu�����ł���H�v�Ƃ�����n�@�����ł����Ƃ��������Ȃ��Ȃ��B
������C�u����v�������ɂ́u�����v���K�v�����Ă����Ă���킯�B
�����Ȃ����{�b�g�ɑ���͂Ȃ��B
�����邩�炱�������B
>�u���s��葬����Α��s�v�u���s���x����Ε��s�v�Ȃ�Ē�`�͌���臒l�ˑ��̘b�ɂȂ�
�K�v���������Ȃ��Ƃ��R������Ă����Ă�����B
�P�D���������݂ɒ��n���邱��
�Q�D�����������ɕ��サ�Ă���u�Ԃ����邱��
�R�D���̑��x�ŕ��s�ł��Ȃ����C���s������G�l���M�[������Ȃ�����
>�ŏI�I�ȖڕW���B������Ȃ���������Ƃ����đ��s�ł͂Ȃ��Ƃ������Ƃɂ͂Ȃ�Ȃ���B
>�S�_�[�h�̉ԉ��F���܂ōs���Ȃ���������Ƃ����āA��������P�b�g�ƌ������Ⴞ�߂����H
���Ƃ̂��肩������B
�u�r���̋@�B�l�`��������葁�����������Ĉړ��ł��Ȃ�����Ƃ����āA
��������{�b�g�ƌ������Ⴞ�߂����H�v
�Ƃ�����������Ă��邾�����ˁB
�ŏI�I�ȖڕW���u�F�����s�v�Ƃ�����A
�u���P�b�g�v����Ȃ��āu�F���D�v�Ɠ����ׂ��ŁA
���������炠����u�F���D�v�ƌ������Ⴞ�߂ł��傤�B
55 �F���J�����������F04/11/17 01:16:58 ID:cHs+357Z
2�_�����B
�����s�Ƃ����Ă��钆�ɖ��m�ȑ��s�ƁA���s�Ƃ����Ȃ��悤�ȑ��s��������Ă������ƁB
�����Łu���s�v���ď����Ă�Ƃ�����݂�Ƃ���͂ǂ����ɂ���u���s�v�Ȃ�H
�Ⴄ�Ȃ�u���s�Ƃ����Ȃ����s�͑��s����Ȃ��v���ē��{��Ƃ��Ăǂ���
���P�D���������݂ɒ��n���邱��
���Q�D�����������ɕ��サ�Ă���u�Ԃ����邱��
���R�D���̑��x�ŕ��s�ł��Ȃ����C���s������G�l���M�[������Ȃ�����
�P�C�Q�����Ȃ���R�����Ȃ�������͂�����ł�����Ǝv�����ǁB
����́u���s�v����Ȃ��́H�Ⴄ�Ȃ牽�H
���Ƃ̂��肩���_�͋c�_�ɂȂ�Ȃ��������������
�����s�Ƃ����Ă��钆�ɖ��m�ȑ��s�ƁA���s�Ƃ����Ȃ��悤�ȑ��s��������Ă������ƁB
�����Łu���s�v���ď����Ă�Ƃ�����݂�Ƃ���͂ǂ����ɂ���u���s�v�Ȃ�H
�Ⴄ�Ȃ�u���s�Ƃ����Ȃ����s�͑��s����Ȃ��v���ē��{��Ƃ��Ăǂ���
���P�D���������݂ɒ��n���邱��
���Q�D�����������ɕ��サ�Ă���u�Ԃ����邱��
���R�D���̑��x�ŕ��s�ł��Ȃ����C���s������G�l���M�[������Ȃ�����
�P�C�Q�����Ȃ���R�����Ȃ�������͂�����ł�����Ǝv�����ǁB
����́u���s�v����Ȃ��́H�Ⴄ�Ȃ牽�H
���Ƃ̂��肩���_�͋c�_�ɂȂ�Ȃ��������������
56 �F���J�����������F04/11/17 01:42:03 ID:cHs+357Z
�����Ƃ����ЂƂ�
>>�ߋ��ɑ��݂���z�b�s���O���{�b�g���Ă̂͑��s�͂ł��Ă�
>>���s���ł��Ȃ��u���s��p�@�v���ˁB������w���āu�����ł���H�v�Ƃ�����n�@�����ł����Ƃ��������Ȃ��Ȃ��B
>������C�u����v�������ɂ́u�����v���K�v�����Ă����Ă���킯�B
>�����Ȃ����{�b�g�ɑ���͂Ȃ��B
>�����邩�炱�������B
���[�H>>50�ł����Ƃ����
>����I�ɂ͉ߋ��̋Z�p���Ȃ����Ă��邾���B
�́u�ߋ��̋Z�p�v���ăz�b�s���O���{�b�g�łȂ��Ƃ���Ή��̂��Ƃ������Ă�H
>>�ߋ��ɑ��݂���z�b�s���O���{�b�g���Ă̂͑��s�͂ł��Ă�
>>���s���ł��Ȃ��u���s��p�@�v���ˁB������w���āu�����ł���H�v�Ƃ�����n�@�����ł����Ƃ��������Ȃ��Ȃ��B
>������C�u����v�������ɂ́u�����v���K�v�����Ă����Ă���킯�B
>�����Ȃ����{�b�g�ɑ���͂Ȃ��B
>�����邩�炱�������B
���[�H>>50�ł����Ƃ����
>����I�ɂ͉ߋ��̋Z�p���Ȃ����Ă��邾���B
�́u�ߋ��̋Z�p�v���ăz�b�s���O���{�b�g�łȂ��Ƃ���Ή��̂��Ƃ������Ă�H
57 �F���J�����������F04/11/17 20:27:33 ID:2CIQenZk
>>55
> �����s�Ƃ����Ă��钆�ɖ��m�ȑ��s�ƁA���s�Ƃ����Ȃ��悤�ȑ��s��������Ă������ƁB
> �����Łu���s�v���ď����Ă�Ƃ�����݂�Ƃ���͂ǂ����ɂ���u���s�v�Ȃ�H
> �Ⴄ�Ȃ�u���s�Ƃ����Ȃ����s�͑��s����Ȃ��v���ē��{��Ƃ��Ăǂ���
���{��̂����܂����ɂ����́B���t������Ȃ��_�͂��l�т������܂��B
�u���s�Ƃ����Ă���v�̎��͂��Ȃ��ŁA
�u���s�Ƃ����Ȃ��v�̎��͎��B
�܂�C
�u���Ȃ��̒�`������e�ł̑��s�̒��ɂ́C
�����F�߂閾�m�ȑ��s�ƁC
���ɂ͑��s�Ƃ����Ȃ��C
���Ȃ�����`���鑖�s��������Ă������ƁB�v
> �P�C�Q�����Ȃ���R�����Ȃ�������͂�����ł�����Ǝv�����ǁB
���Ȃ��̒�`�̂ق����L���̂����炢����ł����邱�ƂɂȂ�ł��傤�B
����I�^�I�ɂ͗����������ΐ��䗝�_���ς��
�i�������_�œ���I�ɐ��䂵�Ă���Ƃ������Ă���g�D������悤�����ǁj
���낤���ǁA���{�b�g�V�X�e���ɂƂ��Ă͐��䂪�ς���������ł�
���������Ƃ͂����Ȃ��̂���Ȃ����ȁH
���䗝�_�����˂���܂킷�̂ɖ���������A
�g�Ђ������x�̍������{�b�g���o���Ă��Ċw��͋�������Ȃ��́H
�S�_�[�h�́u�ߑネ�P�b�g�̕��v�ƌ����Ă��F���D�̕��ł͂Ȃ��悤�ɁA
�����コ���鐧�䗝�_���ł��Ă��A����̓q���[�}�m�C�h���{�b�g��
��v�f�ɂ��������Ȃ���Ȃ��́H
>����ȊO�̗v�f(���Ƃ��Έړ����x�Ƃ�)�͗ʓI�ȕω�(���Ƃ����[�^�̏o�͂Ƃ�)
>���Ȃ߂炩�ɑ������Ă���������͒B�������B
�����ȍl������ˁB
�ȂZ�p�҂̓w�͂������m��Ȃ�������Ȃ��݂������ȁB
�܂�łR�O�N�O��FORTRAN�̃\�[�X���ŐV�̃X�[�p�[�R���s���[�^��
���s��������Ɏ��s�����݂������B
�N���A����A���S���Y�������s����n�[�h��������������Č����낤�ˁB
����I�^�͋C�y���ˁB
>>56
> >����I�ɂ͉ߋ��̋Z�p���Ȃ����Ă��邾���B
> �́u�ߋ��̋Z�p�v���ăz�b�s���O���{�b�g�łȂ��Ƃ���Ή��̂��Ƃ������Ă�H
�ǂ����������Ă���Ǝ��ɂ͎v���Ȃ����Ă��ƁB
�z�b�s���O���{�b�g�������Ă��Ȃ��Ƃ��Ȃ��Ă���̂��A
�r�Ђ�r���̐l�Ȃ�A�����������Ȃ������̃��{�b�g�������Ă���Ƃ͌����Ȃ���Ȃ��́H
�Ǝv���킯���B
�r�Ђ�r���̐l�������Ƃ͎v���Ȃ����ǂ��B
���傪����Ȃ�Q�������s����A
����Ƒ��x���グ�Ă����A
�����������悤�ɂȂ��ĕ������x�̂Q�{���x�̑����ŁA
���������݂ɒ��n�����Ĉړ����Č����Ă��������B
���{�b�g�͐��䗝�_�݂̂ō\������Ă���ɂ��炸�B
> �����s�Ƃ����Ă��钆�ɖ��m�ȑ��s�ƁA���s�Ƃ����Ȃ��悤�ȑ��s��������Ă������ƁB
> �����Łu���s�v���ď����Ă�Ƃ�����݂�Ƃ���͂ǂ����ɂ���u���s�v�Ȃ�H
> �Ⴄ�Ȃ�u���s�Ƃ����Ȃ����s�͑��s����Ȃ��v���ē��{��Ƃ��Ăǂ���
���{��̂����܂����ɂ����́B���t������Ȃ��_�͂��l�т������܂��B
�u���s�Ƃ����Ă���v�̎��͂��Ȃ��ŁA
�u���s�Ƃ����Ȃ��v�̎��͎��B
�܂�C
�u���Ȃ��̒�`������e�ł̑��s�̒��ɂ́C
�����F�߂閾�m�ȑ��s�ƁC
���ɂ͑��s�Ƃ����Ȃ��C
���Ȃ�����`���鑖�s��������Ă������ƁB�v
> �P�C�Q�����Ȃ���R�����Ȃ�������͂�����ł�����Ǝv�����ǁB
���Ȃ��̒�`�̂ق����L���̂����炢����ł����邱�ƂɂȂ�ł��傤�B
����I�^�I�ɂ͗����������ΐ��䗝�_���ς��
�i�������_�œ���I�ɐ��䂵�Ă���Ƃ������Ă���g�D������悤�����ǁj
���낤���ǁA���{�b�g�V�X�e���ɂƂ��Ă͐��䂪�ς���������ł�
���������Ƃ͂����Ȃ��̂���Ȃ����ȁH
���䗝�_�����˂���܂킷�̂ɖ���������A
�g�Ђ������x�̍������{�b�g���o���Ă��Ċw��͋�������Ȃ��́H
�S�_�[�h�́u�ߑネ�P�b�g�̕��v�ƌ����Ă��F���D�̕��ł͂Ȃ��悤�ɁA
�����コ���鐧�䗝�_���ł��Ă��A����̓q���[�}�m�C�h���{�b�g��
��v�f�ɂ��������Ȃ���Ȃ��́H
>����ȊO�̗v�f(���Ƃ��Έړ����x�Ƃ�)�͗ʓI�ȕω�(���Ƃ����[�^�̏o�͂Ƃ�)
>���Ȃ߂炩�ɑ������Ă���������͒B�������B
�����ȍl������ˁB
�ȂZ�p�҂̓w�͂������m��Ȃ�������Ȃ��݂������ȁB
�܂�łR�O�N�O��FORTRAN�̃\�[�X���ŐV�̃X�[�p�[�R���s���[�^��
���s��������Ɏ��s�����݂������B
�N���A����A���S���Y�������s����n�[�h��������������Č����낤�ˁB
����I�^�͋C�y���ˁB
>>56
> >����I�ɂ͉ߋ��̋Z�p���Ȃ����Ă��邾���B
> �́u�ߋ��̋Z�p�v���ăz�b�s���O���{�b�g�łȂ��Ƃ���Ή��̂��Ƃ������Ă�H
�ǂ����������Ă���Ǝ��ɂ͎v���Ȃ����Ă��ƁB
�z�b�s���O���{�b�g�������Ă��Ȃ��Ƃ��Ȃ��Ă���̂��A
�r�Ђ�r���̐l�Ȃ�A�����������Ȃ������̃��{�b�g�������Ă���Ƃ͌����Ȃ���Ȃ��́H
�Ǝv���킯���B
�r�Ђ�r���̐l�������Ƃ͎v���Ȃ����ǂ��B
���傪����Ȃ�Q�������s����A
����Ƒ��x���グ�Ă����A
�����������悤�ɂȂ��ĕ������x�̂Q�{���x�̑����ŁA
���������݂ɒ��n�����Ĉړ����Č����Ă��������B
���{�b�g�͐��䗝�_�݂̂ō\������Ă���ɂ��炸�B
58 �F���J�����������F04/11/18 00:06:07 ID:SHcohNWq
�܂��ŏ����画���Ă������Ƃ�����
(�R)�����u���`�̑��s�v�ȊO�́u���s�v�ƔF�߂����Ȃ��A�Ƃ��������������킯�����
����ł���ȊO�́u�L�`�̑��s�v�́u������Ȃ��v��ˁH
�Ȃ�ŋ��`�̒�`�ɌŎ����čL�`�������Ă͂Ȃ�Ȃ����Ƃ̂悤�Ɉ����̂��킩���B
�����{�b�g�V�X�e���ɂƂ��Ă͐��䂪�ς���������ł͊��������Ƃ͂����Ȃ��̂���Ȃ����ȁH
���̂ˁA�������{�b�g�Z�p�̔�����B����͒��d�v�B
HONDA�̃��{�b�g������Z�p���n������������ł������ƁB����펯�B
����Ɂu���s�����������v�Ƃ͂���������ĂȂ��B���������u�M���M���ł��܂����v���炢�B
�Ђ���Ƃ��Ă�����Ƃ��ɍő�̌��������悤�ȋC�����Ă������B����
�����{�b�g�͐��䗝�_�݂̂ō\������Ă���ɂ��炸�B
����Ȃ�����܂��̂��Ƃɔ����邱�Ƃ��N�������ĂȂ��B
���ǂ����������Ă���Ǝ��ɂ͎v���Ȃ����Ă��ƁB
����͖{�C�ō������ȁB(1)(2)(3)�ȊO�ɂ��Ȃɂ�����������́H
���z�b�s���O���{�b�g�������Ă��Ȃ��Ƃ��Ȃ��Ă���̂��A
���r�Ђ�r���̐l�Ȃ�A�����������Ȃ������̃��{�b�g�������Ă���Ƃ͌����Ȃ���Ȃ��́H
���Ǝv���킯���B�r�Ђ�r���̐l�������Ƃ͎v���Ȃ����ǂ��B
���s���{�b�g�����s���ł���悤�ɂȂ�܂����A�Ƃ����̂�SONY��Y�����̃G�|�b�N�Ȃ̂�B
������u�z�b�s���O���{�b�g�������Ă��Ȃ��v�Ƃ��A�������킯�����B�}�W���肦�Ȃ��B
�������コ���鐧�䗝�_���ł��Ă��A����̓q���[�}�m�C�h���{�b�g��
����v�f�ɂ��������Ȃ���Ȃ��́H
�c���[�ƁB�u�������o���Ȃ��ƃW�F�b�g�G���W���ɂ��炸�A��s�@�̈�v�f�ɂ����Ȃ��v
�Ƃ��������������ł����H
�������ȍl������ˁB�ȂZ�p�҂̓w�͂������m��Ȃ�������Ȃ��݂������ȁB
���s�ƕ��s�Ńp���_�C�����قȂ���Č��t�̈Ӗ����S���`����Ă��Ȃ����Ƃ����͗����ł��܂����B
(�R)�����u���`�̑��s�v�ȊO�́u���s�v�ƔF�߂����Ȃ��A�Ƃ��������������킯�����
����ł���ȊO�́u�L�`�̑��s�v�́u������Ȃ��v��ˁH
�Ȃ�ŋ��`�̒�`�ɌŎ����čL�`�������Ă͂Ȃ�Ȃ����Ƃ̂悤�Ɉ����̂��킩���B
�����{�b�g�V�X�e���ɂƂ��Ă͐��䂪�ς���������ł͊��������Ƃ͂����Ȃ��̂���Ȃ����ȁH
���̂ˁA�������{�b�g�Z�p�̔�����B����͒��d�v�B
HONDA�̃��{�b�g������Z�p���n������������ł������ƁB����펯�B
����Ɂu���s�����������v�Ƃ͂���������ĂȂ��B���������u�M���M���ł��܂����v���炢�B
�Ђ���Ƃ��Ă�����Ƃ��ɍő�̌��������悤�ȋC�����Ă������B����
�����{�b�g�͐��䗝�_�݂̂ō\������Ă���ɂ��炸�B
����Ȃ�����܂��̂��Ƃɔ����邱�Ƃ��N�������ĂȂ��B
���ǂ����������Ă���Ǝ��ɂ͎v���Ȃ����Ă��ƁB
����͖{�C�ō������ȁB(1)(2)(3)�ȊO�ɂ��Ȃɂ�����������́H
���z�b�s���O���{�b�g�������Ă��Ȃ��Ƃ��Ȃ��Ă���̂��A
���r�Ђ�r���̐l�Ȃ�A�����������Ȃ������̃��{�b�g�������Ă���Ƃ͌����Ȃ���Ȃ��́H
���Ǝv���킯���B�r�Ђ�r���̐l�������Ƃ͎v���Ȃ����ǂ��B
���s���{�b�g�����s���ł���悤�ɂȂ�܂����A�Ƃ����̂�SONY��Y�����̃G�|�b�N�Ȃ̂�B
������u�z�b�s���O���{�b�g�������Ă��Ȃ��v�Ƃ��A�������킯�����B�}�W���肦�Ȃ��B
�������コ���鐧�䗝�_���ł��Ă��A����̓q���[�}�m�C�h���{�b�g��
����v�f�ɂ��������Ȃ���Ȃ��́H
�c���[�ƁB�u�������o���Ȃ��ƃW�F�b�g�G���W���ɂ��炸�A��s�@�̈�v�f�ɂ����Ȃ��v
�Ƃ��������������ł����H
�������ȍl������ˁB�ȂZ�p�҂̓w�͂������m��Ȃ�������Ȃ��݂������ȁB
���s�ƕ��s�Ńp���_�C�����قȂ���Č��t�̈Ӗ����S���`����Ă��Ȃ����Ƃ����͗����ł��܂����B
59 �F���J�����������F04/11/20 02:18:12 ID:H8QS0kP2
�Ȃ�قǁE�E�E
60 �F���J�����������F04/11/22 10:49:40 ID:D8OHxpFu
�ʂ肷����łB
�����A�����ґ��̗���ɂ���̂�>>58�̈ӌ��Ɋ�{�I�ɓ��ӁB
�ł��A>>57�̌��������������ł��Ȃ��ȁB
�Ă������A���炭>>58��>>57�̈ӌ��������ł��Ȃ���ł���H
���s���Ă̂́A���ڒn���Ԃ����鎞�_�ŕ��s�Ƃ͌���I�ɈႤ�B
�����Ⴄ���āA�͊w���ۂƂ��đS�R�Ⴄ�B
���̕ӂ�𗝉����Ă���l�ɂ́AS�j�[�Ƃ�S�����̂�������Ƃ̈̂�����������A
��������Ȃ��l����������āA�u�n�@�H�����Ă��ł��H�v�Ƃ��v�����Ⴄ�̂�
�܂��d�����Ȃ����ȁA�Ƃ��v���킯��B
>>57��>>50�Ō����Ă�
�������Ă�����x���u����v���ĂȂ���������ˁH
����ɏW��킯���B���̎��_�ŁA���s�̒�`�Ƃ����������b�łȂ����Ƃ͎������B
�����>>57���A��`���ǂ��̂ƌ������邩��A�Փ˂��N����B
���{�b�g�́A�͊w�Ƃ�����Ƃ���������Ɨ������āA����n�̐v���@���Ă��Ă���
�l�X�ƁA������n�[�h�E�F�A�E�\�t�g�E�F�A�Ŏ�������l�X�ƁA����(�Ƃ��ǂ�����l��)
�̋��͂ɂ���Đi������B����Ȃ̍��X����������̂��p�����������ǁA�܂����ǂ�
��肽�����A����ė~�����ˁB
�����A�����ґ��̗���ɂ���̂�>>58�̈ӌ��Ɋ�{�I�ɓ��ӁB
�ł��A>>57�̌��������������ł��Ȃ��ȁB
�Ă������A���炭>>58��>>57�̈ӌ��������ł��Ȃ���ł���H
���s���Ă̂́A���ڒn���Ԃ����鎞�_�ŕ��s�Ƃ͌���I�ɈႤ�B
�����Ⴄ���āA�͊w���ۂƂ��đS�R�Ⴄ�B
���̕ӂ�𗝉����Ă���l�ɂ́AS�j�[�Ƃ�S�����̂�������Ƃ̈̂�����������A
��������Ȃ��l����������āA�u�n�@�H�����Ă��ł��H�v�Ƃ��v�����Ⴄ�̂�
�܂��d�����Ȃ����ȁA�Ƃ��v���킯��B
>>57��>>50�Ō����Ă�
�������Ă�����x���u����v���ĂȂ���������ˁH
����ɏW��킯���B���̎��_�ŁA���s�̒�`�Ƃ����������b�łȂ����Ƃ͎������B
�����>>57���A��`���ǂ��̂ƌ������邩��A�Փ˂��N����B
���{�b�g�́A�͊w�Ƃ�����Ƃ���������Ɨ������āA����n�̐v���@���Ă��Ă���
�l�X�ƁA������n�[�h�E�F�A�E�\�t�g�E�F�A�Ŏ�������l�X�ƁA����(�Ƃ��ǂ�����l��)
�̋��͂ɂ���Đi������B����Ȃ̍��X����������̂��p�����������ǁA�܂����ǂ�
��肽�����A����ė~�����ˁB
���������Ȃ̂ŁA���s�Ƒ��s�̈Ⴂ�������B
��ʓI�Șb����n�߂�ƁA�^���������Ƃ������̂�����B
dx/dt = f(x,u)
���ꂾ�B�܂��f()�̈����ɂ�t�����邪����͂��Ă����B
���s�̓���Ƃ����̂́A
�E�x�N�g��x��u�̃T�C�Y���ł���(20�Ƃ�50�Ƃ�)
�Eu�̂����A���ڂ�����Ȃ����̂�����(���͂̂��Ƃ���)
�Eu�̂����A���ڂ��������̂̐���x�̐���菭�Ȃ�(�n�ʂɌŒ肳��Ă܂���̂�)
�Ef�͂�������イ�`��ς���(�ڒn��Ԃ��ς��A�A�A)
���ɂ��F�X���邪��̂���ȂƂ���ɐs����B
�͊w�̘b�����Ă��ŁA�����̘b�͂��Ă����B
�����킯�����Ă��炤�������̏d�v���͌���Ȃ�قǕ������Ă邼�B
�ŁA���B���ꂪ���s�ɂȂ�ƁA�X��
�Eu���Ԍ��I�ɂ����^�����Ȃ�(�����Ă���Ԃ͔��͂��^�����Ȃ���)
�E���̊ԁAx�̂������S�ɐ���ł��Ȃ����̂��o�Ă���(�^���ʕۑ����Ɏx�z�����)
�Ȃ�Đ��������܂��ɂ��Ă����Ⴄ�B
�����������ƂȂ�B
�悭������ZMP�Ƃ�������A����͎���u�̈ꕔ�A�����ĕ����Ă���ԂɎp��
�����܂��ɂ��̕������B
���������u�Ԃ�����A�������ꂾ���̂悤�Ɏv���邯�ǁA���̊Ԑ���p���_�C����
�S�R�قȂ�Ƃ����Ӗ����A����ŕ������Ă��炦�邩�ȁB
�������点�邽�߂ɂ́Au�̗^�����𑊓��H�v���Ȃ���Ȃ�Ȃ����A���܂�
���@����Ă����܂łɂ͂܂��܂������肻�����A�A�A�B
��ʓI�Șb����n�߂�ƁA�^���������Ƃ������̂�����B
dx/dt = f(x,u)
���ꂾ�B�܂��f()�̈����ɂ�t�����邪����͂��Ă����B
���s�̓���Ƃ����̂́A
�E�x�N�g��x��u�̃T�C�Y���ł���(20�Ƃ�50�Ƃ�)
�Eu�̂����A���ڂ�����Ȃ����̂�����(���͂̂��Ƃ���)
�Eu�̂����A���ڂ��������̂̐���x�̐���菭�Ȃ�(�n�ʂɌŒ肳��Ă܂���̂�)
�Ef�͂�������イ�`��ς���(�ڒn��Ԃ��ς��A�A�A)
���ɂ��F�X���邪��̂���ȂƂ���ɐs����B
�͊w�̘b�����Ă��ŁA�����̘b�͂��Ă����B
�����킯�����Ă��炤�������̏d�v���͌���Ȃ�قǕ������Ă邼�B
�ŁA���B���ꂪ���s�ɂȂ�ƁA�X��
�Eu���Ԍ��I�ɂ����^�����Ȃ�(�����Ă���Ԃ͔��͂��^�����Ȃ���)
�E���̊ԁAx�̂������S�ɐ���ł��Ȃ����̂��o�Ă���(�^���ʕۑ����Ɏx�z�����)
�Ȃ�Đ��������܂��ɂ��Ă����Ⴄ�B
�����������ƂȂ�B
�悭������ZMP�Ƃ�������A����͎���u�̈ꕔ�A�����ĕ����Ă���ԂɎp��
�����܂��ɂ��̕������B
���������u�Ԃ�����A�������ꂾ���̂悤�Ɏv���邯�ǁA���̊Ԑ���p���_�C����
�S�R�قȂ�Ƃ����Ӗ����A����ŕ������Ă��炦�邩�ȁB
�������点�邽�߂ɂ́Au�̗^�����𑊓��H�v���Ȃ���Ȃ�Ȃ����A���܂�
���@����Ă����܂łɂ͂܂��܂������肻�����A�A�A�B
62 �F�Ȋw�̗͂�2�^�F04/11/22 22:07:05 ID:EwZunniC
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@__�Q_
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�e/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@/�@�@�@�Q
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ �@,�^���'�R,.-,�''�Q~"''�R�A
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ �@ �@/ƃm::,�^-'�^!;;;;;ށR.�^�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@-�|'-�B�L�@__..�l-�''i:::�R<�A''.>o-;;;}�Pi'
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �^/�C��,�Ti��'_,Ɓ]'��.o-,i�L_;;/,,�m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^.:/ '�\-,(�)�,X�@_,lll�^)/.�^")��Ɓ���/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �^..:::/�@�@�@�@ �R(�)�R�^���^,,:::/�@�@�@�@�@ /
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ _.,.�D-�''"7�@ _.,,�^.,,,;;;;/ �@ �@ .....::::::�l;;�^��i::�q��)�m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ...,,,7./�P�P��'''=--�R�@....::::::;;;;_.�B�L,,�^:::�^ �P
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@,,,z���/ /�@�@�@�@�@ "�R `i,,,-'''~(��)---i;�^
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^�^," ."��(��)�@�@�@�@ށR/(��)��'"�^��iɁ@
�@�@�@�@�@�@�@,,x�\�]��,,:�^�^,�^ `��A . �M~�@�@�@�@�c,,ށ]'�J::::�ځ�)�^
�@�@�@ _,,-'"�J::r��i;;;_l�^�^,�^�M.,�^�@.,�R�D�@�@_,,.;:-'':::::::::::::::,.-''�P
�@.r�]'�p::::::::::::_,�^�_,-�'�,�^ ,,�^�@.,,�^�@,�i_,."_z-'"::::�V,.-''"
�@ |�@.|;;;;�^�O .,,-�'�,�^.,,�^�@_�^�@�@ .�^�m.-'--�^'"�'i
�@ .�R,,|;;;;;-''.��'���_,�^�@,,�^�M�@�@�@�(���Q_;;;;�^�@�@,/:!
�@�@�@ �M ,,.-'���,�^�M.,,�^�M�@�@�@_,�^�i,,i-,i�L,�^�@�@�@,/:;!
�@�@�@,.-�V'��'" ,,�^�M�@�@ .,,�^�J;;�^�yi" ,z�L�@�@�@.�^:;lށ@
�@ .,/�'''�R �J.,,-'���@�@,,�^�_;�^�O .'"�M�@ .|�M'-,..,�^:::::��
�@ �.l�@�@ ނ��@�@.,,,-'";;�^�� �@ �@ �@ �@ |�@�@|::::::::�^
�@�@�R.�@�@ �l,-'";;�^�J�@�@ �@ �@ �@ �@ �@ {,,_�@|.,�^
�@�@�@�M��.,,{-'���@�@�@�@�@�@�@�@�@�@�@�@�@ �M�O
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�e/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@/�@�@�@�Q
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ �@,�^���'�R,.-,�''�Q~"''�R�A
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ �@ �@/ƃm::,�^-'�^!;;;;;ށR.�^�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@-�|'-�B�L�@__..�l-�''i:::�R<�A''.>o-;;;}�Pi'
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �^/�C��,�Ti��'_,Ɓ]'��.o-,i�L_;;/,,�m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^.:/ '�\-,(�)�,X�@_,lll�^)/.�^")��Ɓ���/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �^..:::/�@�@�@�@ �R(�)�R�^���^,,:::/�@�@�@�@�@ /
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ _.,.�D-�''"7�@ _.,,�^.,,,;;;;/ �@ �@ .....::::::�l;;�^��i::�q��)�m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ...,,,7./�P�P��'''=--�R�@....::::::;;;;_.�B�L,,�^:::�^ �P
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@,,,z���/ /�@�@�@�@�@ "�R `i,,,-'''~(��)---i;�^
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^�^," ."��(��)�@�@�@�@ށR/(��)��'"�^��iɁ@
�@�@�@�@�@�@�@,,x�\�]��,,:�^�^,�^ `��A . �M~�@�@�@�@�c,,ށ]'�J::::�ځ�)�^
�@�@�@ _,,-'"�J::r��i;;;_l�^�^,�^�M.,�^�@.,�R�D�@�@_,,.;:-'':::::::::::::::,.-''�P
�@.r�]'�p::::::::::::_,�^�_,-�'�,�^ ,,�^�@.,,�^�@,�i_,."_z-'"::::�V,.-''"
�@ |�@.|;;;;�^�O .,,-�'�,�^.,,�^�@_�^�@�@ .�^�m.-'--�^'"�'i
�@ .�R,,|;;;;;-''.��'���_,�^�@,,�^�M�@�@�@�(���Q_;;;;�^�@�@,/:!
�@�@�@ �M ,,.-'���,�^�M.,,�^�M�@�@�@_,�^�i,,i-,i�L,�^�@�@�@,/:;!
�@�@�@,.-�V'��'" ,,�^�M�@�@ .,,�^�J;;�^�yi" ,z�L�@�@�@.�^:;lށ@
�@ .,/�'''�R �J.,,-'���@�@,,�^�_;�^�O .'"�M�@ .|�M'-,..,�^:::::��
�@ �.l�@�@ ނ��@�@.,,,-'";;�^�� �@ �@ �@ �@ |�@�@|::::::::�^
�@�@�R.�@�@ �l,-'";;�^�J�@�@ �@ �@ �@ �@ �@ {,,_�@|.,�^
�@�@�@�M��.,,{-'���@�@�@�@�@�@�@�@�@�@�@�@�@ �M�O
63 �F�Ȋw�̗͂�3�^�F04/11/22 22:20:20 ID:EwZunniC
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@__�Q_
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�e/'
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@/�@�@�@�Q_____
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ �@�^���'�R,.-,''~.�Q~"''�S�A�A
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ .�@�@/�j�t,�^�^�^!;;;;;ށR.�^)�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@-�|'-�B�L�@__�T--�C::�R <--'�Ro-;;}�Pi/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �^/�C��,�Ti��'__,�m���R�^o-�/,,�m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^.:/ '�\-,(�)�,X'�@�@lll.�^)_,.�^")��Ɓ���/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �^..:::/�@�@�@�@ �R(�)�R..�^(iii)�^,,::::Ɂ@�@�@�@�@/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ _.,.�D-�''"7�@ _.,,�^.,,,;;;;/ �@ �@ .....::::::�!;,;;�^���^�q��)/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ...,,,7./�P�P��'''=--�R�@.....::::::;;;;_..�B�L���^ll�^�P
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@,,,z���/ /�@�@�@�@�@ "�R "�S-'''~(��)''��-i,ll�^
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^_,,,,",,."��(��)) �@�@�@.ށR/(��)-'"�^��iɁ@
�@�@�@�@�@�@�@,,x�\�]��,,:�^�^ ..,�^ `x�A�M~�@�@�@�@�c,,ށ]'�J::::::r'��)�^
�@�@�@ _,,-'"�J::r��i;;;_l�^�^ ..,�^�M .,�^ �R�@�@ _,,,..-'':�::::::::::,.-''�P
�@ r''~!::::::::_,�^�_,-�'�,�^ ,,�^�@.,,�^�@.,�^�p-'"_z-'":__�,.-''"
�@ |�@.|;;;;;�^�O.,,-�'ށ^.,,�^�@ _�^�@,�^�^�m.�..,,__�^'"�'i
�@ .�R,,|;;;;;x'''�^.�^�_,�^�@,,�^�M,.�^�@(���Q_;;;;�^�@�@,/:!
�@�@�@ �M ,�^.�^�,�^�M,,�^�M�@�^ .,,�^�;;;-''�L,�^�@�@�@,/:;|
�@�@�@.�^.�^,,�^�M �^�@.,�^�J.,�^//�@�@ �^�@�@�@ �^::;i'
�@�@,/�'''�R �^�@�^ ,�^� _,�^"'"�M�@�@�@ .|�M'-,..,�^:::::��
�@�@l�@|::::::�R�^.,,-'",,.�^"�@�@�@�@ �@ �@ .|�@�@|::::::::�^
�@�@�R.�R:::::�l,-'",,�^�J�@�@�@�@ �@ �@ �@ �@!,,_�@|,.�^
�@�@�@�M-�,,.�-'���@�@�@�@�@�@�@�@�@�@�@�@�@ �M�O
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�e/'
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@/�@�@�@�Q_____
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ �@�^���'�R,.-,''~.�Q~"''�S�A�A
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ .�@�@/�j�t,�^�^�^!;;;;;ށR.�^)�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@-�|'-�B�L�@__�T--�C::�R <--'�Ro-;;}�Pi/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �^/�C��,�Ti��'__,�m���R�^o-�/,,�m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^.:/ '�\-,(�)�,X'�@�@lll.�^)_,.�^")��Ɓ���/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �^..:::/�@�@�@�@ �R(�)�R..�^(iii)�^,,::::Ɂ@�@�@�@�@/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ _.,.�D-�''"7�@ _.,,�^.,,,;;;;/ �@ �@ .....::::::�!;,;;�^���^�q��)/
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ...,,,7./�P�P��'''=--�R�@.....::::::;;;;_..�B�L���^ll�^�P
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@,,,z���/ /�@�@�@�@�@ "�R "�S-'''~(��)''��-i,ll�^
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^_,,,,",,."��(��)) �@�@�@.ށR/(��)-'"�^��iɁ@
�@�@�@�@�@�@�@,,x�\�]��,,:�^�^ ..,�^ `x�A�M~�@�@�@�@�c,,ށ]'�J::::::r'��)�^
�@�@�@ _,,-'"�J::r��i;;;_l�^�^ ..,�^�M .,�^ �R�@�@ _,,,..-'':�::::::::::,.-''�P
�@ r''~!::::::::_,�^�_,-�'�,�^ ,,�^�@.,,�^�@.,�^�p-'"_z-'":__�,.-''"
�@ |�@.|;;;;;�^�O.,,-�'ށ^.,,�^�@ _�^�@,�^�^�m.�..,,__�^'"�'i
�@ .�R,,|;;;;;x'''�^.�^�_,�^�@,,�^�M,.�^�@(���Q_;;;;�^�@�@,/:!
�@�@�@ �M ,�^.�^�,�^�M,,�^�M�@�^ .,,�^�;;;-''�L,�^�@�@�@,/:;|
�@�@�@.�^.�^,,�^�M �^�@.,�^�J.,�^//�@�@ �^�@�@�@ �^::;i'
�@�@,/�'''�R �^�@�^ ,�^� _,�^"'"�M�@�@�@ .|�M'-,..,�^:::::��
�@�@l�@|::::::�R�^.,,-'",,.�^"�@�@�@�@ �@ �@ .|�@�@|::::::::�^
�@�@�R.�R:::::�l,-'",,�^�J�@�@�@�@ �@ �@ �@ �@!,,_�@|,.�^
�@�@�@�M-�,,.�-'���@�@�@�@�@�@�@�@�@�@�@�@�@ �M�O
64 �F���J�����������F04/11/23 02:11:26 ID:uwnOXNmv
�܂��m��Ȃ��z�ׂ̈ɓ\���Ƃ���I�I
http://csx.jp/~damemushi/gazou/swf/moemaiyahi.swf
http://ouai59.free.fr/ozone.mp3
http://csx.jp/~damemushi/il/maiyahi.html
�@�@.nn
�@�i�E�́j���}�C���q�[
(�R(�@uu
�@`(�Q)_)
http://csx.jp/~damemushi/gazou/swf/moemaiyahi.swf
http://ouai59.free.fr/ozone.mp3
http://csx.jp/~damemushi/il/maiyahi.html
�@�@.nn
�@�i�E�́j���}�C���q�[
(�R(�@uu
�@`(�Q)_)
65 �F���J�����������F04/11/23 15:34:38 ID:hHdmdtXM
��w���̔��H�ɂ͂킩���̂ł�
66 �F���J�����������F04/11/23 19:52:48 ID:c0fvrr0V
>>65
���ꂪ����Ȃ̂����s�Ȃ̂��������̂��Y�܂����Ƃ��낾���B
���ꂪ����Ȃ̂����s�Ȃ̂��������̂��Y�܂����Ƃ��낾���B
67 �F���J�����������F04/11/25 13:30:59 ID:wLxy9Oz7
���s���{�b�g�����̕s�т����悭�킩��X���ł���
68 �F���J�����������F04/11/28 14:14:12 ID:TVgtlq9E
�g���C���ˁ`�I�I�@�@http://f13.aaa.livedoor.jp/~hipopona/imgboardphp/src/1100713975565.jpg
�@�@�@�@�@�@�@�@�@�v
�@�@�@�@�@�@�@ �_�C��
�@�@�@�@�@�@�^__|�����n_____�^�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ __�@ ____
�@�@�@�@�@�@�P��___�P �t�P�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^�� /�@�_ .�R�A
�@�@�@�@�@�@/ /�Z�Y_�P'|�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ _�@�ā@�@ �i�@�@�@�j�@�@�_
�@�@���@�@ �_|_________�n�_�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �^�i__Ɂ@ r-=`��L _�@�@�@ |
�@�@�@�@�_�ご/�@�@�@ �n�Q�^�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ___,--'�@�@�@_�^ �^ //�܁R�@�@�@|
�@�@�@�@�@/�@�@ /�@�@�@�@|�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ __�^�@�@�@ _,--=�@ �^/ / Ɂ@/ |�@�@�@|
�@�@�@�@�Z�Z�Y�@�@ ///�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@,�^�@�@�@ __�^�@�@�@ ��' /�^ / /�^Ɂ@�@�@�
�@���@__��@�@�@�_____|�P|///�@�@�@�@�@�@�@�@__,-===�P�_�@�@�^�@�@�@�@�@ /�P�R�^�^�^�@�@�@/
�@�@||�^��������___y---|�P��/��---=�^_________==-�i�W�j�@�@�@�@�@�@|�@�@ �j���/�@�@�@�@�
�@r"�P�P���P�@�@�@�@�@�P�P�P______�������@�@�@�@�@ ___ r'�P�P�R�A�@�@�@�T-���`'�@�@�@ �^
��������������/�Q�Q�@ �i���j/�@�@�@_____ �u�@�v�@�@�@�@�@ Ɂ@�@�@�@�@�@�@�@�@�@�@�^
�@�_�@�@�@�_�@�@�@�@|�P�P�P�[�\�\����==__�k___| �P�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �^
�@�@ �k�@�@�@ �_�@�@�@�R�@�@�@�@�@�@�@�@�@�@�@�@������----===�[�\�\----------�i
�@�@�@ �T�@�@�@ �_�@�@�@�_�@�@�@�@�@ |�@�@�@�@ �������@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�_
�@�@�ځQ�@�@�@�@�@�_�@�@ �_�@�@�@�@�_�@�@�@�@ l�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@|
�@�@�@�@�@ �_�Q�Q�Q�T�Q�Q �T�@�@�@�@�T�@�@�@�_�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ |
�@�@�@�@�@�@�@�����@ �P�[--����===________�@�T�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�܁[------==_______�@�@�@�@�@ �^
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@�܁��\�\'
{kind=link}
�@�@�@�@�@�@�@�@�@�v
�@�@�@�@�@�@�@ �_�C��
�@�@�@�@�@�@�^__|�����n_____�^�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ __�@ ____
�@�@�@�@�@�@�P��___�P �t�P�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^�� /�@�_ .�R�A
�@�@�@�@�@�@/ /�Z�Y_�P'|�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ _�@�ā@�@ �i�@�@�@�j�@�@�_
�@�@���@�@ �_|_________�n�_�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �^�i__Ɂ@ r-=`��L _�@�@�@ |
�@�@�@�@�_�ご/�@�@�@ �n�Q�^�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ___,--'�@�@�@_�^ �^ //�܁R�@�@�@|
�@�@�@�@�@/�@�@ /�@�@�@�@|�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ __�^�@�@�@ _,--=�@ �^/ / Ɂ@/ |�@�@�@|
�@�@�@�@�Z�Z�Y�@�@ ///�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@,�^�@�@�@ __�^�@�@�@ ��' /�^ / /�^Ɂ@�@�@�
�@���@__��@�@�@�_____|�P|///�@�@�@�@�@�@�@�@__,-===�P�_�@�@�^�@�@�@�@�@ /�P�R�^�^�^�@�@�@/
�@�@||�^��������___y---|�P��/��---=�^_________==-�i�W�j�@�@�@�@�@�@|�@�@ �j���/�@�@�@�@�
�@r"�P�P���P�@�@�@�@�@�P�P�P______�������@�@�@�@�@ ___ r'�P�P�R�A�@�@�@�T-���`'�@�@�@ �^
��������������/�Q�Q�@ �i���j/�@�@�@_____ �u�@�v�@�@�@�@�@ Ɂ@�@�@�@�@�@�@�@�@�@�@�^
�@�_�@�@�@�_�@�@�@�@|�P�P�P�[�\�\����==__�k___| �P�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �^
�@�@ �k�@�@�@ �_�@�@�@�R�@�@�@�@�@�@�@�@�@�@�@�@������----===�[�\�\----------�i
�@�@�@ �T�@�@�@ �_�@�@�@�_�@�@�@�@�@ |�@�@�@�@ �������@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�_
�@�@�ځQ�@�@�@�@�@�_�@�@ �_�@�@�@�@�_�@�@�@�@ l�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@|
�@�@�@�@�@ �_�Q�Q�Q�T�Q�Q �T�@�@�@�@�T�@�@�@�_�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ |
�@�@�@�@�@�@�@�����@ �P�[--����===________�@�T�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�܁[------==_______�@�@�@�@�@ �^
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@�܁��\�\'
69 �F���J�����������F04/11/30 18:26:24 ID:jLdj4HYk
���̃X���̋^�⎋����Ă邱�Ƃ́A�قƂ�ǎY�����̃v���X�����[�X�ɏ����Ă��������B
QRIO��z�b�s���O���{�ɂ��Ă��G��A�킩��₷���Z�܂��Ă���̂ŁA
�����x�ǂ�ł݂Ă���B
�@ttp://www.aist.go.jp/aist_j/press_release/pr2004/pr20040415_2/pr20040415_2.html
�t���[�h����1�ȏ�̃��{�b�g���o�Ă��邱�ƂɊ���age�B
QRIO��z�b�s���O���{�ɂ��Ă��G��A�킩��₷���Z�܂��Ă���̂ŁA
�����x�ǂ�ł݂Ă���B
�@ttp://www.aist.go.jp/aist_j/press_release/pr2004/pr20040415_2/pr20040415_2.html
�t���[�h����1�ȏ�̃��{�b�g���o�Ă��邱�ƂɊ���age�B
70 �F���J�����������F04/12/03 10:20:22 ID:DP4tb+kf
69�̃A�h���X�̃��{�b�g�̓������u���s�v�ƌĂ�ł��܂���Ƃ����̂́A�����Ƒn����
�����郏�U�Ƃ��������悤���Ȃ��ȁB�Ƒn���̂Ȃ��I���ɂ́u���Ⴊ�ݒn�c�ʕ����v��
���������Ȃ��B���ꂪ�u����v�̊�b���Ƃ���A�������甭�W����u����v�Ƃ����̂́A
�s�����R�s�����R���т͂˂���̂ɂ����Ȃ�Ȃ���Ȃ����ȁH
�����郏�U�Ƃ��������悤���Ȃ��ȁB�Ƒn���̂Ȃ��I���ɂ́u���Ⴊ�ݒn�c�ʕ����v��
���������Ȃ��B���ꂪ�u����v�̊�b���Ƃ���A�������甭�W����u����v�Ƃ����̂́A
�s�����R�s�����R���т͂˂���̂ɂ����Ȃ�Ȃ���Ȃ����ȁH
71 �F���J�����������F04/12/03 10:56:46 ID:TYiKuPis
>�@2�r�ł̈ړ��ɂ����ẮA�������n�ʂ��痣��A���ɕ����u�Ԃ����݂�����̂����s�ƒ�`����Ă���B
>�@���݁A�������Ă���̂͐ڒn��0.3s�A��0.06s�ŕ��ϑ��x0.16m/s�i����0.576km)���x��
>�����x���u�W���M���O�v���̑��s�ł���B
>�@����́u�Ƃ肠�����v�l�ԃT�C�Y�̐l�Ԍ^2�����{�b�g�ő��s���\�Ȃ��Ƃ��m�F�����ɂ����Ȃ��B
>�����s���x�̖ڈ�
>���{�b�g�̃T�C�Y�ɂ��Ȃ����s���x�̖ڈ��Ƃ��ă}�N�j�[���E�A���N�T���_�[����Ă���
>�u�t���[�h���v������B�t���[�h���́@F=���ϑ��x/��i�r�����d�͒萔�j�Œ�`�����B
>�l�Ԃ̏ꍇ�AF=1�ȉ��ł͕��s�Ƒ��s�̗������\�����A
>F=1�ȏ�ł͂��͂�������Ƃ͂ł������s���邵���Ȃ��B
>���̈Ӗ���F=1��˔j�ł��邩������J�������ł��낤���s���{�b�g�̐��\�̖ڈ��ƂȂ�B
>���Ȃ݂�HRP-2LR�ł�F=0.07�ASONY��QRIO�ł�F=0.17�B
>HRP-2LR��F=1��B�����邽�߂ɂ͌��݂̖�15�{�A2.4m/s(����8.7km)��B������K�v������B
��������͖̂ʓ|�Ȃ̂ŁA>>69�̃����N�悩��R�s�y�B
>�@���݁A�������Ă���̂͐ڒn��0.3s�A��0.06s�ŕ��ϑ��x0.16m/s�i����0.576km)���x��
>�����x���u�W���M���O�v���̑��s�ł���B
>�@����́u�Ƃ肠�����v�l�ԃT�C�Y�̐l�Ԍ^2�����{�b�g�ő��s���\�Ȃ��Ƃ��m�F�����ɂ����Ȃ��B
>�����s���x�̖ڈ�
>���{�b�g�̃T�C�Y�ɂ��Ȃ����s���x�̖ڈ��Ƃ��ă}�N�j�[���E�A���N�T���_�[����Ă���
>�u�t���[�h���v������B�t���[�h���́@F=���ϑ��x/��i�r�����d�͒萔�j�Œ�`�����B
>�l�Ԃ̏ꍇ�AF=1�ȉ��ł͕��s�Ƒ��s�̗������\�����A
>F=1�ȏ�ł͂��͂�������Ƃ͂ł������s���邵���Ȃ��B
>���̈Ӗ���F=1��˔j�ł��邩������J�������ł��낤���s���{�b�g�̐��\�̖ڈ��ƂȂ�B
>���Ȃ݂�HRP-2LR�ł�F=0.07�ASONY��QRIO�ł�F=0.17�B
>HRP-2LR��F=1��B�����邽�߂ɂ͌��݂̖�15�{�A2.4m/s(����8.7km)��B������K�v������B
��������͖̂ʓ|�Ȃ̂ŁA>>69�̃����N�悩��R�s�y�B
72 �F���J�����������F04/12/03 22:06:05 ID:+uq3kvJ0
�Z�ɂ̉e�œ������ɃI�`���`�������点������Ă悭����Ă�
73 �F���J�����������F04/12/03 22:56:56 ID:wTHVm/EA
>>69�̃����N�̂��̎p���Ɠ����𑖍s���ƌĂ�ŁA����Ȃ��̂ő��s���\���Ƃ������Ƃ�
�m�F�ł����H�@����Ȃ��Ƃ������Ă��Ȃ�A�R��͑��s���郍�{�b�g�̎������s�\����
�m�M���邯�ǂȁB
�m�F�ł����H�@����Ȃ��Ƃ������Ă��Ȃ�A�R��͑��s���郍�{�b�g�̎������s�\����
�m�M���邯�ǂȁB
74 �F���J�����������F04/12/04 00:40:22 ID:KQNqPXse
75 �F���J�����������F04/12/04 08:34:37 ID:9YN9zLqQ
�������w���̔��H�̌N�B���N�ɂ͂킩���̂ł�
76 �F���J�����������F04/12/04 09:16:56 ID:omzD5N3j
>>73
���������Ă��d���Ȃ������m��Ȃ��B
�����ɂ́A��X�̎v���`���悤�ȑ��s����������͖̂������낤�B
�ł��A���͖����Ă͂Ȃ�Ȃ������ԁB
���̌��^�̏��C���S����1769�N�ɍ��ꂽ�Ƃ��A�����̐l�X�͓��������v�����͂����B
�u����Ȃ��̂��܂Ƃ��ɑ����悤�ɂȂ�킯�������v�ƁB
���ہA�J���҂��r���ł�����߂Ă��܂������A���̐l�����̓w�͂ɂ���č��Ɏ���B
���̐l�Ԍ^�������s���{�b�g�AP2�����\����Ă����8�N�A�悤�₭�����܂ŗ����B
�������������ڂŌ��Ă���ė~�����Ǝv���B
���������Ă��d���Ȃ������m��Ȃ��B
�����ɂ́A��X�̎v���`���悤�ȑ��s����������͖̂������낤�B
�ł��A���͖����Ă͂Ȃ�Ȃ������ԁB
���̌��^�̏��C���S����1769�N�ɍ��ꂽ�Ƃ��A�����̐l�X�͓��������v�����͂����B
�u����Ȃ��̂��܂Ƃ��ɑ����悤�ɂȂ�킯�������v�ƁB
���ہA�J���҂��r���ł�����߂Ă��܂������A���̐l�����̓w�͂ɂ���č��Ɏ���B
���̐l�Ԍ^�������s���{�b�g�AP2�����\����Ă����8�N�A�悤�₭�����܂ŗ����B
�������������ڂŌ��Ă���ė~�����Ǝv���B
77 �F���J�����������F04/12/04 11:11:24 ID:Gm7zN5TS
>>76 �Ȃ�قǁB�m���ɐ��}������̂����ˁB
������ƋC������Ȃ��ǁA�����Ԃ̏ꍇ�́A�S�ւň��肵�Ēn�ʂɗ͂���������������ǁA
�ł̑���͂����ł͂Ȃ���ˁB�����A�����Ƃ������Ă��鎞�Ԃ����邵�A�}�g���ȁA
������u����炵������v���Ƒ��������Ă��鎞�Ԃ̕��������B�܂�A�����ł��Ȃ�
���Ԃ̕���������B�ʂ����Ď����Ԃ̔��B�Ɠ����悤�ɒ����ڂŌ��Ă����ėǂ�����
�Ȃ낤���H�@���ĂˁB
������ƋC������Ȃ��ǁA�����Ԃ̏ꍇ�́A�S�ւň��肵�Ēn�ʂɗ͂���������������ǁA
�ł̑���͂����ł͂Ȃ���ˁB�����A�����Ƃ������Ă��鎞�Ԃ����邵�A�}�g���ȁA
������u����炵������v���Ƒ��������Ă��鎞�Ԃ̕��������B�܂�A�����ł��Ȃ�
���Ԃ̕���������B�ʂ����Ď����Ԃ̔��B�Ɠ����悤�ɒ����ڂŌ��Ă����ėǂ�����
�Ȃ낤���H�@���ĂˁB
78 �F���J�����������F04/12/04 12:06:15 ID:TRUi5V+U
�����ړ�������������ԗւ����������B
��s�@�ł��Ă���̂ɉH������s�@�̐����
���O��R�₵�Ă��邩�̔@���A�Q�����s�Ɏ��߂��ꂽ
���H�Ɛ���I�^�͍H�w�̃Z���X���F���B
�ǂ��]��ł��ߋ�ɂ����Ȃ�Ȃ�
��s�@�ł��Ă���̂ɉH������s�@�̐����
���O��R�₵�Ă��邩�̔@���A�Q�����s�Ɏ��߂��ꂽ
���H�Ɛ���I�^�͍H�w�̃Z���X���F���B
�ǂ��]��ł��ߋ�ɂ����Ȃ�Ȃ�
79 �F���J�����������F04/12/04 12:19:32 ID:7NSQvrfl
>>77
������Ȃ��B
��������l���w�͂��邱�ƂɊO�삪�Ƃ₩�������Ă����傤���Ȃ�����
���Ȃ�����������Ȃ�Ƃ������A�����łȂ���Ȃ璷���ڂŌ��ĂĂ��܂�낤�B
����悤�ɂȂ邩�ǂ������Ď��Ȃ瑖���Ǝv����A
�����ł��Ȃ����Ԃ��������Ă��Ƃ͂���قǖ��ł͂Ȃ���
����ł��鎞�Ԃɐ��m�ɐ���ł���A�����ł��Ȃ����Ԃ̏�ԕω��͗\���ł���
���ɐ���\�ȃ^�C�~���O�ŗ\���Ƃ̌덷���C�����Đ�������邾���B
���͂�������������ɂ��Ă����쓮�n�B
�������A�����͓��X�����ɐi�����Ă�̂ő��s�Ɏg������̂��ł�̂�
������̘b�Ƃ��v���Ȃ��B
��������������Ƃ����ĉ��Ɏg���̂��͋^��
�Ȃ�Ɏg����H
������Ȃ��B
��������l���w�͂��邱�ƂɊO�삪�Ƃ₩�������Ă����傤���Ȃ�����
���Ȃ�����������Ȃ�Ƃ������A�����łȂ���Ȃ璷���ڂŌ��ĂĂ��܂�낤�B
����悤�ɂȂ邩�ǂ������Ď��Ȃ瑖���Ǝv����A
�����ł��Ȃ����Ԃ��������Ă��Ƃ͂���قǖ��ł͂Ȃ���
����ł��鎞�Ԃɐ��m�ɐ���ł���A�����ł��Ȃ����Ԃ̏�ԕω��͗\���ł���
���ɐ���\�ȃ^�C�~���O�ŗ\���Ƃ̌덷���C�����Đ�������邾���B
���͂�������������ɂ��Ă����쓮�n�B
�������A�����͓��X�����ɐi�����Ă�̂ő��s�Ɏg������̂��ł�̂�
������̘b�Ƃ��v���Ȃ��B
��������������Ƃ����ĉ��Ɏg���̂��͋^��
�Ȃ�Ɏg����H
80 �F���J�����������F04/12/04 12:38:07 ID:mkJxulaq
��������̃Z���T�Ƃ��ꂩ�炭��c��Ȍv�Z�ʂ���������CPU���o��Ζ�薳���B
�������ꂪ�ǂ����Ă��Ȃ��H�����N���Ă��Ȃ��������B
�����ɏo�Ă���B�܂Ƃ�����Ȃ����B
�������ꂪ�ǂ����Ă��Ȃ��H�����N���Ă��Ȃ��������B
�����ɏo�Ă���B�܂Ƃ�����Ȃ����B
81 �F���J�����������F04/12/04 13:20:41 ID:5loZv5UM
>>80
�v�Z���悤�Ƃ����̂����������̊ԈႢ�B
�v�Z���悤�Ƃ����̂����������̊ԈႢ�B
82 �F���J�����������F04/12/05 06:52:49 ID:edW8FDOd
>>79 ���������Ă��傤���Ȃ����Ƃ��A�O��łƂ₩�������̂��Ċy�����W�����H�@
�����͂����������������ꂾ�Ǝv�����ǂˁB
���̂U�X�̃����N�ɂ��铮�悩�炷��ƁA���N�҂Ƃ��������悤�ɂ͂Ȃ��Ǝv���B
81�̌����Ă�A�u�v�Z���悤�Ƃ����̂����������̊ԈႢ�B�v�Ƃ����͓̂������Ă�Ǝv����B
�����͐���ł��Ȃ��B���p����Ɍ���B�����𗘗p���邱�ƂŌv�Z�͕K�v�łȂ��Ȃ�B
79�́u����ł��鎞�Ԃɐ��m�ɐ���ł���v�����́u�^���A���o�v�������ɑ����čl�����
�����Ă��鎞�́w����ł��鎞�ԁx���ڒn���Ԃ�.1����.3�b���炢�ŁA���̒Z���Ԃɂ������P�{��
���������x���ɂ��Ďp����������Ȃ���Ȃ�Ȃ��B�������n�ʂɒ����Ă���ΊȒP�Ȃ��Ƃł��A
��{�������ƍ����B
>>�����ł��Ȃ����Ԃ̏�ԕω��͗\���ł���B���ɐ���\�ȃ^�C�~���O�ŗ\���Ƃ̌덷��
�C�����Đ�������邾��
�@�@�@�@��
����͉ʂ����Ă������낤���H�@���̑��x�ňړ����Ă���̂Ȃ�ł��邩������Ȃ�����ǁA
�������͂��ׂĂ��ω����邩��ˁB�����牽���Ȃ�ł����m�ɐ��䂵�悤�Ƃ����̂ł͂Ȃ��A
�����𗘗p���Ă��������ςȂ܂܂ɂ��Ă������ƍl����������p�I���낤�ˁB
�����悤�ɂȂ�����A����͐l�Ԃ̑��肪�ł���͈͂��傫���g����Ƃ������Ƃ�����A
���p�����ʂ͑�����B�u���{�b�g�ɂ��l�����I�v�Ƃ�������������������Ȃ����ȁB
�����͂����������������ꂾ�Ǝv�����ǂˁB
���̂U�X�̃����N�ɂ��铮�悩�炷��ƁA���N�҂Ƃ��������悤�ɂ͂Ȃ��Ǝv���B
81�̌����Ă�A�u�v�Z���悤�Ƃ����̂����������̊ԈႢ�B�v�Ƃ����͓̂������Ă�Ǝv����B
�����͐���ł��Ȃ��B���p����Ɍ���B�����𗘗p���邱�ƂŌv�Z�͕K�v�łȂ��Ȃ�B
79�́u����ł��鎞�Ԃɐ��m�ɐ���ł���v�����́u�^���A���o�v�������ɑ����čl�����
�����Ă��鎞�́w����ł��鎞�ԁx���ڒn���Ԃ�.1����.3�b���炢�ŁA���̒Z���Ԃɂ������P�{��
���������x���ɂ��Ďp����������Ȃ���Ȃ�Ȃ��B�������n�ʂɒ����Ă���ΊȒP�Ȃ��Ƃł��A
��{�������ƍ����B
>>�����ł��Ȃ����Ԃ̏�ԕω��͗\���ł���B���ɐ���\�ȃ^�C�~���O�ŗ\���Ƃ̌덷��
�C�����Đ�������邾��
�@�@�@�@��
����͉ʂ����Ă������낤���H�@���̑��x�ňړ����Ă���̂Ȃ�ł��邩������Ȃ�����ǁA
�������͂��ׂĂ��ω����邩��ˁB�����牽���Ȃ�ł����m�ɐ��䂵�悤�Ƃ����̂ł͂Ȃ��A
�����𗘗p���Ă��������ςȂ܂܂ɂ��Ă������ƍl����������p�I���낤�ˁB
�����悤�ɂȂ�����A����͐l�Ԃ̑��肪�ł���͈͂��傫���g����Ƃ������Ƃ�����A
���p�����ʂ͑�����B�u���{�b�g�ɂ��l�����I�v�Ƃ�������������������Ȃ����ȁB
83 �F���J�����������F04/12/05 13:14:21 ID:LqJGr/EB
�������̃��x���̒Ⴓ�́B
84 �F���J�����������F04/12/05 13:20:40 ID:ZI4k4pl/
>>83
���x�������c�_��낵���B�l�^���Ȃ���B
���x�������c�_��낵���B�l�^���Ȃ���B
85 �F���J�����������F04/12/05 13:29:45 ID:xpMXkLMg
���Ԃ�A83���������鍂�����x���Ƃ����̂́A���āu���s�͂ł��Ȃ��v�ƌ��_�����_�C�K�N��
�Z���Z��̂悤�ɁA���t����������Ȑ��p��𗅗������̂��̂Ȃ낤��B
�Z���Z��̂悤�ɁA���t����������Ȑ��p��𗅗������̂��̂Ȃ낤��B
86 �F���J�����������F04/12/05 15:25:56 ID:LqJGr/EB
>>�����ł��Ȃ����Ԃ̏�ԕω��͗\���ł���B���ɐ���\�ȃ^�C�~���O�ŗ\���Ƃ̌덷��
�C�����Đ�������邾��
�������
�������Ȃ�ł����m�ɐ��䂵�悤�Ƃ����̂ł͂Ȃ��A
�����𗘗p���Ă��������ςȂ܂܂ɂ��Ă������ƍl����������p�I���낤�ˁB
������
�����Ă邱�Ƃ͓����B
���������͂��ׂĂ��ω����邩��ˁB
�d�͉����x�ȊO�̉����́A�͂�������Â��Ȃ�����Ȃ�����
���ɐڒn���Ԃ��R���}�R�b�i���ꂪ�������Z�����̓n�[�h�ɂ��Ƃ��낪�傫���j
���Ƃ��āA�n�ʂ��痣�ꂽ���_�ʼn������瓙���ɕς��
���̎��_�ʼn����͒��f����āA���̐ڒn���Ԃ܂ł͓����ړ�(�܂������ړ��Ǝv���Ă���Ă����j
�Ȃ̂ʼn�����Ԃɔ�חe�Ղɋ����\���͉\�B�������O���͂���̂ŗ\�����l��
���ۂɎ��ɒ��n�������_�ł͐��l���قȂ�A
�����ł�����x�̕ψق��z�����鐧�䂪�K�v�ɂȂ�
����̎�����69�̓���A�s���D�����z���ł��Ă�̂�
���ׂĂ𐳊m�Ɍv�Z������ŁA���_�l�Ǝ����̂ł͈قȂ邱�Ƃ�������
�덷���C�����邱�Ƃ��K�v�ɂȂ�B
�덷�����Ȃ���Ώ��Ȃ��قǏC���̐���͊y�ɂȂ��ˁB
�����̒Z���Ԃɂ������P�{��
�����������x���ɂ��Ďp����������Ȃ���Ȃ�Ȃ��B
����͂��łɂ����Ȍ������ň�{���z�b�s���O���{�b�g���ł��Ă�B
�P���ɂ�����Q�R�Ȃ�������Ƃ����ĂQ���ɂ͂Ȃ��{���ł�����\�ȏ؋��ɂ͂Ȃ�B
������Ȑ��p��Ȃ��ł����Ă݂����B
�C�����Đ�������邾��
�������
�������Ȃ�ł����m�ɐ��䂵�悤�Ƃ����̂ł͂Ȃ��A
�����𗘗p���Ă��������ςȂ܂܂ɂ��Ă������ƍl����������p�I���낤�ˁB
������
�����Ă邱�Ƃ͓����B
���������͂��ׂĂ��ω����邩��ˁB
�d�͉����x�ȊO�̉����́A�͂�������Â��Ȃ�����Ȃ�����
���ɐڒn���Ԃ��R���}�R�b�i���ꂪ�������Z�����̓n�[�h�ɂ��Ƃ��낪�傫���j
���Ƃ��āA�n�ʂ��痣�ꂽ���_�ʼn������瓙���ɕς��
���̎��_�ʼn����͒��f����āA���̐ڒn���Ԃ܂ł͓����ړ�(�܂������ړ��Ǝv���Ă���Ă����j
�Ȃ̂ʼn�����Ԃɔ�חe�Ղɋ����\���͉\�B�������O���͂���̂ŗ\�����l��
���ۂɎ��ɒ��n�������_�ł͐��l���قȂ�A
�����ł�����x�̕ψق��z�����鐧�䂪�K�v�ɂȂ�
����̎�����69�̓���A�s���D�����z���ł��Ă�̂�
���ׂĂ𐳊m�Ɍv�Z������ŁA���_�l�Ǝ����̂ł͈قȂ邱�Ƃ�������
�덷���C�����邱�Ƃ��K�v�ɂȂ�B
�덷�����Ȃ���Ώ��Ȃ��قǏC���̐���͊y�ɂȂ��ˁB
�����̒Z���Ԃɂ������P�{��
�����������x���ɂ��Ďp����������Ȃ���Ȃ�Ȃ��B
����͂��łɂ����Ȍ������ň�{���z�b�s���O���{�b�g���ł��Ă�B
�P���ɂ�����Q�R�Ȃ�������Ƃ����ĂQ���ɂ͂Ȃ��{���ł�����\�ȏ؋��ɂ͂Ȃ�B
������Ȑ��p��Ȃ��ł����Ă݂����B
87 �F���J�����������F04/12/05 15:45:40 ID:0nIZM+nn
���������̂��Ăǂ��Ŋw�H
����₷���{��T�C�g����������ė~����
�܂��f�l���꒩��[�ŃG�b�Z���X�������ݎ�낤�Ȃ�ēs���̂����b���Ǝv����������E�E�E
����₷���{��T�C�g����������ė~����
�܂��f�l���꒩��[�ŃG�b�Z���X�������ݎ�낤�Ȃ�ēs���̂����b���Ǝv����������E�E�E
88 �F���J�����������F04/12/05 15:55:02 ID:q6fsNZ89
��w���A�����{�ɂ͖���
89 �F���J�����������F04/12/05 16:02:06 ID:0nIZM+nn
�����ł����E�E�E
90 �F���J�����������F04/12/05 16:45:28 ID:hI4w9Sfl
>>86 �G���C�I�@�ŁA����B�z�b�s���O���{�̑��̃A�N�V�����ƁA�u����炵������v��
�ꍇ�̑��̃A�N�V�����͈Ⴄ��ȁH�@����͂��̏꒵�тł͂Ȃ��B���i�͂܂Ȃ����
����ł͂Ȃ��B
����ł���{���ł̐��䂪�\���Ƃ����؋��ɂȂ链�邩���H
�ꍇ�̑��̃A�N�V�����͈Ⴄ��ȁH�@����͂��̏꒵�тł͂Ȃ��B���i�͂܂Ȃ����
����ł͂Ȃ��B
����ł���{���ł̐��䂪�\���Ƃ����؋��ɂȂ链�邩���H
91 �F���J�����������F04/12/05 17:59:55 ID:ZI4k4pl/
>>87
>>69�݂����ȃv���X�����[�X�ɂ��A
>>86���������Ă�悤�Ȃ��Ƃ͈ꕔ�����Ă��邵�A
���������̂�������Ɠǂ�ł����A�i�X�킩��悤�ɂȂ�Ǝv���B
�����������o���Ă��ǂ��Ȃ�A���{�b�g�̉���{�Ȃ͏o�Ă邵�A
���{�R���}�K�W���Ȃ��w�ǂ��Ă݂Ă��ǂ������B
>>69�݂����ȃv���X�����[�X�ɂ��A
>>86���������Ă�悤�Ȃ��Ƃ͈ꕔ�����Ă��邵�A
���������̂�������Ɠǂ�ł����A�i�X�킩��悤�ɂȂ�Ǝv���B
�����������o���Ă��ǂ��Ȃ�A���{�b�g�̉���{�Ȃ͏o�Ă邵�A
���{�R���}�K�W���Ȃ��w�ǂ��Ă݂Ă��ǂ������B
92 �F���J�����������F04/12/05 18:21:59 ID:ZI4k4pl/
>>86
�킩��Ղ��������B
>>90
>>69�̓���ł��A�Б����тň��肵�Ē��ё����Ă���B
�܂�A�Б������ł����n���ɒ��n�̏Ռ����z�����A
���̒���p���ɃX���[�Y�Ɉڂ邱�Ƃ��o�����Ă���Ƃ������ƁB
�u����炵������v�ɂȂ��Ă��A�ڒn���A���̑��̌X�Ίp�x��
�����Ⴄ�����ŁA����͕ς��Ȃ��Ǝv�����B
�킩��Ղ��������B
>>90
>>69�̓���ł��A�Б����тň��肵�Ē��ё����Ă���B
�܂�A�Б������ł����n���ɒ��n�̏Ռ����z�����A
���̒���p���ɃX���[�Y�Ɉڂ邱�Ƃ��o�����Ă���Ƃ������ƁB
�u����炵������v�ɂȂ��Ă��A�ڒn���A���̑��̌X�Ίp�x��
�����Ⴄ�����ŁA����͕ς��Ȃ��Ǝv�����B
93 �F���J�����������F04/12/05 18:43:20 ID:zU4KQEsx
CPG���Ăǂ��ł����B�O���ɂ͋������ł����A���ꂻ���ł����H
94 �F���J�����������F04/12/05 18:48:03 ID:q6fsNZ89
>69 �Ȃ�ŃR�T�b�N�_���X�������邩��
95 �F���J�����������F04/12/05 19:26:35 ID:hI4w9Sfl
>>92 ���`��A�����v�����Ⴄ���B�z�b�s���O�̏ꍇ�ɂ́A����̕����Ɨ͂̍�p����
��v���Ă����ɁA���̍�p���̏�ɏd�S������킯�ŁA���䂵�₷����ˁB
�u����炵������v�̏ꍇ�ɂ́A���E�ɊԊu�̂���Q�_(�Ҋ߂̐ڍ���)�Ŏx����ꂽ
���_�̐^�����ɏc�̖_�𗧂ĂāA���̖_�ɏd�S�����h���ɂȂ��Ă�����Ă��ƂɂȂ�B
�ہ�����̏c�_�ɑ傫�ȁ�(�d�S)�����Ă��āA���_�̗��[���Ҋ߂̐ڍ����A�����
�x�����Ă���Ǝv���Ă���B
�z�b�s���O�ł͋��߂铮��̕����͐����ɐ^�ゾ����ǁA����炵������ł́A���߂铮���
�����͐����ŁA���R�A�d�S�͗͂̍�p����ɂ͂Ȃ��B
�ڒn���ɂ́ۂ̉��_�̗��[�̂ǂ��炩�Е��������݂ɒn�ʂ���̔��͂��Ďx����Ɠ�����
���������֑S�̂������߂̓���������Ȃ���Ȃ�Ȃ��B
����Ȃ��Ƃ��l���Ă��������ĕς��Ȃ��Ǝv�����H
��v���Ă����ɁA���̍�p���̏�ɏd�S������킯�ŁA���䂵�₷����ˁB
�u����炵������v�̏ꍇ�ɂ́A���E�ɊԊu�̂���Q�_(�Ҋ߂̐ڍ���)�Ŏx����ꂽ
���_�̐^�����ɏc�̖_�𗧂ĂāA���̖_�ɏd�S�����h���ɂȂ��Ă�����Ă��ƂɂȂ�B
�ہ�����̏c�_�ɑ傫�ȁ�(�d�S)�����Ă��āA���_�̗��[���Ҋ߂̐ڍ����A�����
�x�����Ă���Ǝv���Ă���B
�z�b�s���O�ł͋��߂铮��̕����͐����ɐ^�ゾ����ǁA����炵������ł́A���߂铮���
�����͐����ŁA���R�A�d�S�͗͂̍�p����ɂ͂Ȃ��B
�ڒn���ɂ́ۂ̉��_�̗��[�̂ǂ��炩�Е��������݂ɒn�ʂ���̔��͂��Ďx����Ɠ�����
���������֑S�̂������߂̓���������Ȃ���Ȃ�Ȃ��B
����Ȃ��Ƃ��l���Ă��������ĕς��Ȃ��Ǝv�����H
96 �F���J�����������F04/12/05 20:40:12 ID:ZI4k4pl/
>>95
�Б����ڒn���Ă����Ԃ͕��s�Ƒ債�ĕς��Ȃ��̂ŁA�ꎞ�I��ZMP���䂪�g����B
ZMP����ɂ��Ă͂��̕ӂ����Ă���B
ttp://www.honda.co.jp/factbook/robot/asimo/200011/04.html
������g���āA�����͍�p�_�ƖڕWZMP����v������悤�ɐ��䂷��A
�z�b�s���O���{�b�g�Ƃ̈Ⴂ�͂���قǑ傫���Ȃ��͂��B
���ہA>>69�̓���ł�>>95�̓��e�������o���Ă邩��A
�O�ɐi�߂Ă����H
�Б����ڒn���Ă����Ԃ͕��s�Ƒ債�ĕς��Ȃ��̂ŁA�ꎞ�I��ZMP���䂪�g����B
ZMP����ɂ��Ă͂��̕ӂ����Ă���B
ttp://www.honda.co.jp/factbook/robot/asimo/200011/04.html
������g���āA�����͍�p�_�ƖڕWZMP����v������悤�ɐ��䂷��A
�z�b�s���O���{�b�g�Ƃ̈Ⴂ�͂���قǑ傫���Ȃ��͂��B
���ہA>>69�̓���ł�>>95�̓��e�������o���Ă邩��A
�O�ɐi�߂Ă����H
�~�z�b�s���O���{�b�g�����z�b�s���O
98 �F���J�����������F04/12/05 23:50:27 ID:Uk6d2EJx
>>95
�z�b�s���O���{�b�g�������L�����Ă邯�ǁH
http://www.ai.mit.edu/projects/leglab/robots/3D_biped/3D_biped.html
MIT�l�ɂ͏��ĂȂ����畉���ɂ��݂������Ă���悤�ɂ����������Ȃ��B
MIT��100Km�ȏ���l�͔�s�@�Ŕ��ł��܂��Ă���̂�
���܂��ɒ��l�ԃR���e�X�g������Ă���悤�Ȃ��̂��ȁB
�z�b�s���O���{�b�g�������L�����Ă邯�ǁH
http://www.ai.mit.edu/projects/leglab/robots/3D_biped/3D_biped.html
MIT�l�ɂ͏��ĂȂ����畉���ɂ��݂������Ă���悤�ɂ����������Ȃ��B
MIT��100Km�ȏ���l�͔�s�@�Ŕ��ł��܂��Ă���̂�
���܂��ɒ��l�ԃR���e�X�g������Ă���悤�Ȃ��̂��ȁB
99 �F���J�����������F04/12/06 00:36:33 ID:MPdSJn3m
>>98
�Ԃ����������Ă铮��A�Ȃ����B
����ρAMIT�����[�ȁB
��{���ł��Ęb��������A����������Ȃ����ȁB
ttp://www.ai.mit.edu/projects/leglab/robots/3D_hopper/3D_hopper.html
���łɁA�ŋ߂̘a���z�b�s���O���{
ttp://www.mechatronics.mech.tohoku.ac.jp/research/Kenken/kenken_jp.htm
ttp://www.runbot.jp/research/runbot2_j.html
�Ԃ����������Ă铮��A�Ȃ����B
����ρAMIT�����[�ȁB
��{���ł��Ęb��������A����������Ȃ����ȁB
ttp://www.ai.mit.edu/projects/leglab/robots/3D_hopper/3D_hopper.html
���łɁA�ŋ߂̘a���z�b�s���O���{
ttp://www.mechatronics.mech.tohoku.ac.jp/research/Kenken/kenken_jp.htm
ttp://www.runbot.jp/research/runbot2_j.html
100 �F���J�����������F04/12/06 01:28:06 ID:MPdSJn3m
101 �F�X�T�F04/12/06 01:40:16 ID:pPc8Buhv
>>96 ���肪�Ƃ��B�z���_��ZMP�������̓[���̈Ӗ�����������B�Ƃ������A����
�u�p�^���ʂ̑��a���[���v�Ƃ��������Ɋ�Â��āu�l�Ԃ̑���v���������Ă���ǁA
���t�����Ă����ŁA�Ӗ��͓������낤�Ǝv���Ă��B�S�R�Ⴄ�Ƃ����̂���������B
98�A99�����肪�Ƃ��BMIT�l�̂������Ƃ���́A����Łu����Q�����{�b�g���ł����v�Ƃ�
����Ȃ��Ƃ��낾�ˁB����Ƃ����̂͂���Ȃ�Ȃ��Ɣ����Ă����ˁB
�������c�O�I�@����炩�炷��ƁA�l�Ԃ̂悤�ɕ����āA����郍�{�b�g�̎����͂܂��܂�
���̂��Ă���Ƃ��������Ȃ��ȁB
�x���̂ł܂������B
�u�p�^���ʂ̑��a���[���v�Ƃ��������Ɋ�Â��āu�l�Ԃ̑���v���������Ă���ǁA
���t�����Ă����ŁA�Ӗ��͓������낤�Ǝv���Ă��B�S�R�Ⴄ�Ƃ����̂���������B
98�A99�����肪�Ƃ��BMIT�l�̂������Ƃ���́A����Łu����Q�����{�b�g���ł����v�Ƃ�
����Ȃ��Ƃ��낾�ˁB����Ƃ����̂͂���Ȃ�Ȃ��Ɣ����Ă����ˁB
�������c�O�I�@����炩�炷��ƁA�l�Ԃ̂悤�ɕ����āA����郍�{�b�g�̎����͂܂��܂�
���̂��Ă���Ƃ��������Ȃ��ȁB
�x���̂ł܂������B
102 �F���J�����������F04/12/06 12:52:43 ID:T3xr2ofp
>>95 ���㔨�̐l�ł������B�Ȃ�ƂȂ����͋C�̂悤�Ȃ��̂��Ⴄ�ȁA�Ƃ͎v���܂������B
���N���烍�{�c�g�H�w�̏W�܂�Ɂu�v�Ƃ��u�Ȃ�v�̐l�̍u�����{�`�{�`����悤��
�Ȃ��Ă�����ł����A���o�I�ȕ\���������̂ŁA�s���Ƃ��Ȃ����Ƃ������ł��B
�͎��ۂ̂Ƃ���A�ǂ��Ȃ�ł����H�@���Ȃ��͗͊w���g���Č������Ă���悤�ł����H
���N���烍�{�c�g�H�w�̏W�܂�Ɂu�v�Ƃ��u�Ȃ�v�̐l�̍u�����{�`�{�`����悤��
�Ȃ��Ă�����ł����A���o�I�ȕ\���������̂ŁA�s���Ƃ��Ȃ����Ƃ������ł��B
�͎��ۂ̂Ƃ���A�ǂ��Ȃ�ł����H�@���Ȃ��͗͊w���g���Č������Ă���悤�ł����H
103 �F���J�����������F04/12/06 16:46:09 ID:mivFynVq
>>98
�ق��n�Ȃǂ̋r�Ɠ����悤�ɑ���Ȃ瑫���̖ʐϏ��Ȃ������ǂ��ȁB
�ق��n�Ȃǂ̋r�Ɠ����悤�ɑ���Ȃ瑫���̖ʐϏ��Ȃ������ǂ��ȁB
104 �F���J�����������F04/12/06 21:04:36 ID:hASE3IMc
>>101
>�u�p�^���ʂ̑��a���[���v�Ƃ��������Ɋ�Â��āu�l�Ԃ̑���v������
���ꑼ�̃X���ɂ����������ǁA���W���[�ȉ����Ȃ́H
�������Ă�������Ȃ������̂ŁA�ڍ�]�B
>�u�p�^���ʂ̑��a���[���v�Ƃ��������Ɋ�Â��āu�l�Ԃ̑���v������
���ꑼ�̃X���ɂ����������ǁA���W���[�ȉ����Ȃ́H
�������Ă�������Ȃ������̂ŁA�ڍ�]�B
105 �F���J�����������F04/12/07 00:55:47 ID:VPYa4My4
�����K�����Ȃ�
106 �F�ʂ肷���肾�����F04/12/07 10:16:14 ID:Lq2xktL8
>>104
���̃X�����ǂꂩ�����Ă����Ƃ��낢��c�_�ł��邯�ǁc
�����������̂�����p����ۂ��߂ɂ͏d�S����̊p�^���ʂ�0����Ȃ���
�܂����̂�B>>101�����������̂͂����ƕʂ̂��Ƃ�������Ȃ����ǁA
������ɂ���u�ǂ̓_����́v�p�^���ʂȂ̂����厖���ˁB
���̃X�����ǂꂩ�����Ă����Ƃ��낢��c�_�ł��邯�ǁc
�����������̂�����p����ۂ��߂ɂ͏d�S����̊p�^���ʂ�0����Ȃ���
�܂����̂�B>>101�����������̂͂����ƕʂ̂��Ƃ�������Ȃ����ǁA
������ɂ���u�ǂ̓_����́v�p�^���ʂȂ̂����厖���ˁB
107 �F95=101�F04/12/07 15:45:01 ID:2/78EhuL
���Ⴂ�̎��Ɏ��₵�Ă���Ă��肪�Ƃ��B���͒�����ă��X�������Ă�������ǁA
�u�{�����������܂��v�Əo�āA�u�߂�v�Ƃ�����S���������܂��āA�K�b�N�����ĐQ��
�܂�����ł����B
�u�p�^���ʂ̑��a���[���v�Ƃ����̂́A���W���[�ǂ��납�A���\���炵�ĂȂ��ł��B
�@���Ƃ��Ă���u�p�^���ʃ[���v�́A��́A�`���ς�Ȃ��ő̂ł̂��ƂȂ�ł����A
�l�͎̂��r�������āu�ό`�v���܂�����A���ʂ͂��Ă͂܂�Ȃ��A���Ă͂߂悤�Ƃ�
���Ȃ���ł����A��I�ɂ��Ă͂߂čl���悤�Ƃ������ƂȂ�ł���B
�Ⴆ�A����̋r�����A��������̋r�ɂ͎����I�ɂ��̔��̌����ɓ���������
����͂�������B�����Ȃ蓾����������݂���A�Ƃ������̂ł��B���̎��͒��S�ɂ���_��
��[�Ҋ߂̐ڍ����̒��ԓ_]�Ƃ������ƂɂȂ�܂��ˁB�������ɁA���������C�J�T�}�I��
��@��p���č�}����ƁA���ɐ����Ɂu���i�́v��������u�e�R�v�̃��J�j�Y����
�o���オ��A�u���͂ɂ��Ȃ��v���i���\�ɂȂ�܂��B�����A���������w�O�͂̂悤�Ɂx
�����悤�ȗ͂����������ł���B����͒N�ɂł��N���Ă����ł����A���̗͂́A�����
�^�C�~���O��͂̓�����ŗe�ՂɌ��������ł����܂��B�����I��͂��̐��i�͂̌��������Ȃ�
�킯�ŁA����ɂ���āA�I��̒��q�̗ǂ����͂������A�������̐���(�ʏ�̓����^����
�����ł����Â����Ă��܂���ł���)���A�ł��܂��B
�u�{�����������܂��v�Əo�āA�u�߂�v�Ƃ�����S���������܂��āA�K�b�N�����ĐQ��
�܂�����ł����B
�u�p�^���ʂ̑��a���[���v�Ƃ����̂́A���W���[�ǂ��납�A���\���炵�ĂȂ��ł��B
�@���Ƃ��Ă���u�p�^���ʃ[���v�́A��́A�`���ς�Ȃ��ő̂ł̂��ƂȂ�ł����A
�l�͎̂��r�������āu�ό`�v���܂�����A���ʂ͂��Ă͂܂�Ȃ��A���Ă͂߂悤�Ƃ�
���Ȃ���ł����A��I�ɂ��Ă͂߂čl���悤�Ƃ������ƂȂ�ł���B
�Ⴆ�A����̋r�����A��������̋r�ɂ͎����I�ɂ��̔��̌����ɓ���������
����͂�������B�����Ȃ蓾����������݂���A�Ƃ������̂ł��B���̎��͒��S�ɂ���_��
��[�Ҋ߂̐ڍ����̒��ԓ_]�Ƃ������ƂɂȂ�܂��ˁB�������ɁA���������C�J�T�}�I��
��@��p���č�}����ƁA���ɐ����Ɂu���i�́v��������u�e�R�v�̃��J�j�Y����
�o���オ��A�u���͂ɂ��Ȃ��v���i���\�ɂȂ�܂��B�����A���������w�O�͂̂悤�Ɂx
�����悤�ȗ͂����������ł���B����͒N�ɂł��N���Ă����ł����A���̗͂́A�����
�^�C�~���O��͂̓�����ŗe�ՂɌ��������ł����܂��B�����I��͂��̐��i�͂̌��������Ȃ�
�킯�ŁA����ɂ���āA�I��̒��q�̗ǂ����͂������A�������̐���(�ʏ�̓����^����
�����ł����Â����Ă��܂���ł���)���A�ł��܂��B
108 �F95=101�F04/12/07 15:47:22 ID:2/78EhuL
���i�͂͂����Ɍ����Ă��܂��ƁAMIT�́u�l�����N���Q�v�̂��̌`�́A�K�v�s��
���ƌ����܂��B�d�S�̈ʒu�ɋ߂��Ƃ��납����ˏ�Ɂw�́x��ł��o���A�܂�߂�
�����P�Ȃ�_��˂��o���A�P���ȍ�p����p�̖@���ŁA�n�ʂ���w�d�S�ɋ߂��ʒu�x��
�X�g���[�g�ɔ��͂��Ԃ��Ă���킯�ł��B�s��������͂̍�p���������r(�_)�ł�����A
������ȒP�Ȃ킯�ł����A���̗��N���Q�͂Q�{���ŏd�S������ō��E�ɊJ���Ă��܂��B
���͂��Ԃ��Ă���ꏊ�����S�ɏd�S�Ɉ�v���Ă��Ȃ����Ƃɂ��w�˂���x�Ȃǂ�
���R�N�����ł����A�Q�́u�Ҋ߁v�̊Ԋu��蓪�̕������͂邩�ɑ傫���ďd��
�ł�����A�Ҋ߂Ő�����w�˂���x�Ȃǂ̗͂́A�������[�����g���͂邩�ɑ傫��
���̕����ŋz�����Ă��܂���킯�ł��B���䂪���₷�����ƂŁu�����̂����v������
�ł��Ă��ł����A����͐l�ԂƂ͎��Ă������Ȃ��킯�ŁA���{��ASIMO��������
���܂�����AMIT�́u�l�����N���Q�v���s�����s�������˂Ă���̂����Ă��A�u���ꂪ
�ǂ������H�v�ƁA���͌����Ă��܂��܂��ˁB
���ƌ����܂��B�d�S�̈ʒu�ɋ߂��Ƃ��납����ˏ�Ɂw�́x��ł��o���A�܂�߂�
�����P�Ȃ�_��˂��o���A�P���ȍ�p����p�̖@���ŁA�n�ʂ���w�d�S�ɋ߂��ʒu�x��
�X�g���[�g�ɔ��͂��Ԃ��Ă���킯�ł��B�s��������͂̍�p���������r(�_)�ł�����A
������ȒP�Ȃ킯�ł����A���̗��N���Q�͂Q�{���ŏd�S������ō��E�ɊJ���Ă��܂��B
���͂��Ԃ��Ă���ꏊ�����S�ɏd�S�Ɉ�v���Ă��Ȃ����Ƃɂ��w�˂���x�Ȃǂ�
���R�N�����ł����A�Q�́u�Ҋ߁v�̊Ԋu��蓪�̕������͂邩�ɑ傫���ďd��
�ł�����A�Ҋ߂Ő�����w�˂���x�Ȃǂ̗͂́A�������[�����g���͂邩�ɑ傫��
���̕����ŋz�����Ă��܂���킯�ł��B���䂪���₷�����ƂŁu�����̂����v������
�ł��Ă��ł����A����͐l�ԂƂ͎��Ă������Ȃ��킯�ŁA���{��ASIMO��������
���܂�����AMIT�́u�l�����N���Q�v���s�����s�������˂Ă���̂����Ă��A�u���ꂪ
�ǂ������H�v�ƁA���͌����Ă��܂��܂��ˁB
109 �F95=101�F04/12/07 15:50:12 ID:2/78EhuL
�w�x�́A�_��������Ă�������̐搶���A�n�́u�Î~�ɋ߂��ɂ߂Ă�����肵�����s�v����
�㎈�����̓��������ĂЂ�߂������̂������ŁA�n�̌㎈�ł�����A���̏�ɂ͉����Ȃ��āA
�O�ɓ��̂Ƃ����f�J�����ʂ��h�[���Ƃ����č��͂���Ɏx�����Ă���`�ł�����A���߂���
�w�˂���x�ȂNjN���悤�������A�l�Ԃ̓����s����͍ł����������ł̘b�ɂ͈Ⴂ����܂���B
���̏��c�搶�ɗ͊w�ŋc�_�𐁂������Ă݂����Ƃ������ł����A�u���i�͂Ȃl���邩��_��
�Ȃv�ƁA�c�_�ɏ���Ă͂���܂���ł����B
����Ȓ��x�ł͂���܂����A���ہA�ɂ́A���Ȃ葽���́w�M�ҁx������킯�ŁA���̗��R�́A
���c�������铮��Ŏ��ۂɊy�ɐi�ނ��Ƃ��ł���Ƃ������ƂȂ�ł��B
���́w�x�̓���Ƃ����̂�[�u���͂ɂ��Ȃ��v���i���ł���A���ɐ����Ɂu���i�́v��
������u�e�R�v�̃��J�j�Y��]�ɐ��Ƀh���s�V���Ȃ�ł��B����̌����ł͂����܂ł��A��������
�������邱�Ƃ��ړI�ŁA�܂��u���p�ʁv���l����ƁA���c���̒��铮��͂₽��ɓ���A
�܂������ؓ����g��Ȃ�(�b������b�������������Ȃ�Ƃ͌����Ȃ�)�̂ŁA���́w�x�̓����
����ł̓{�c�Ȃ�ł����A���{�b�g�𑖂点��ɂ́u�n�ʔ��͂��g��Ȃ����i�@�v�́A����������
���������̗͂�ʁX�ɍl������̂ŗL���ƌ����܂��B���A���݂̃��{�b�g�̋쓮���@�ł͂���
[���ɐ����Ɂu���i�́v��������u�e�R�v�̃��J�j�Y��]�͐������Ȃ���ł���B
�㎈�����̓��������ĂЂ�߂������̂������ŁA�n�̌㎈�ł�����A���̏�ɂ͉����Ȃ��āA
�O�ɓ��̂Ƃ����f�J�����ʂ��h�[���Ƃ����č��͂���Ɏx�����Ă���`�ł�����A���߂���
�w�˂���x�ȂNjN���悤�������A�l�Ԃ̓����s����͍ł����������ł̘b�ɂ͈Ⴂ����܂���B
���̏��c�搶�ɗ͊w�ŋc�_�𐁂������Ă݂����Ƃ������ł����A�u���i�͂Ȃl���邩��_��
�Ȃv�ƁA�c�_�ɏ���Ă͂���܂���ł����B
����Ȓ��x�ł͂���܂����A���ہA�ɂ́A���Ȃ葽���́w�M�ҁx������킯�ŁA���̗��R�́A
���c�������铮��Ŏ��ۂɊy�ɐi�ނ��Ƃ��ł���Ƃ������ƂȂ�ł��B
���́w�x�̓���Ƃ����̂�[�u���͂ɂ��Ȃ��v���i���ł���A���ɐ����Ɂu���i�́v��
������u�e�R�v�̃��J�j�Y��]�ɐ��Ƀh���s�V���Ȃ�ł��B����̌����ł͂����܂ł��A��������
�������邱�Ƃ��ړI�ŁA�܂��u���p�ʁv���l����ƁA���c���̒��铮��͂₽��ɓ���A
�܂������ؓ����g��Ȃ�(�b������b�������������Ȃ�Ƃ͌����Ȃ�)�̂ŁA���́w�x�̓����
����ł̓{�c�Ȃ�ł����A���{�b�g�𑖂点��ɂ́u�n�ʔ��͂��g��Ȃ����i�@�v�́A����������
���������̗͂�ʁX�ɍl������̂ŗL���ƌ����܂��B���A���݂̃��{�b�g�̋쓮���@�ł͂���
[���ɐ����Ɂu���i�́v��������u�e�R�v�̃��J�j�Y��]�͐������Ȃ���ł���B
110 �F95=101�F04/12/07 16:14:26 ID:2/78EhuL
>>103 MIT�̐l���N���Q�́A����́u����v�Ƃ������e�ɂ͓����Ǝv���܂���B
�����̖ʐς����������Ƃ̓X�p�C�N�̂悤�ȁu���ׂ�h�~�v�̈Ӗ��̕����傫����
�v���܂��B
�n�̃q�d���̓q�g�̒��w�ɂ�����킯�ŁA����͗L���Ȋ߂̐����ő�ɂ��āA
�u�ό`�̎��R�x�v�𑝂����ʂ�����܂��B�u�ό`�̎��R�x�v���傫�������n�ʂ�
��ԂɑΉ����₷���Ȃ�܂����A�܂��u�K�v�ȃ��X�v�������₷�����Ƃɂ�
�Ȃ�܂��B�K�v�ȃ��X�Ƃ́A�r�̋ؓ���[�o���Ă��܂���]�͂Ɍ�����������
�S�g�̈ړ����ł��Ȃ��ꍇ�ɁA�s�v�ȗ͂����Ă��܂�Ȃ��Ƌr�����݂܂�����A
�����̊߂ŗ͂����X������K�v������Ƃ������Ƃł��B����̓��{�b�g�ɂ�������
���Ƃ��Ǝv���܂��B
�ł��Ȃ�
�����̖ʐς����������Ƃ̓X�p�C�N�̂悤�ȁu���ׂ�h�~�v�̈Ӗ��̕����傫����
�v���܂��B
�n�̃q�d���̓q�g�̒��w�ɂ�����킯�ŁA����͗L���Ȋ߂̐����ő�ɂ��āA
�u�ό`�̎��R�x�v�𑝂����ʂ�����܂��B�u�ό`�̎��R�x�v���傫�������n�ʂ�
��ԂɑΉ����₷���Ȃ�܂����A�܂��u�K�v�ȃ��X�v�������₷�����Ƃɂ�
�Ȃ�܂��B�K�v�ȃ��X�Ƃ́A�r�̋ؓ���[�o���Ă��܂���]�͂Ɍ�����������
�S�g�̈ړ����ł��Ȃ��ꍇ�ɁA�s�v�ȗ͂����Ă��܂�Ȃ��Ƌr�����݂܂�����A
�����̊߂ŗ͂����X������K�v������Ƃ������Ƃł��B����̓��{�b�g�ɂ�������
���Ƃ��Ǝv���܂��B
�ł��Ȃ�
111 �F95=101�F04/12/07 16:16:31 ID:2/78EhuL
����H110�̍Ō�́u�ł��Ȃ��v�Ƃ����̂͏����Y��ł��ˁB
112 �F104�F04/12/07 20:46:50 ID:UrQZfekN
>>106
�z���_��ASIMO�i�A�V���j
ttp://that3.2ch.net/test/read.cgi/robot/1047403193/261-
>>107
�����Ă���Ă��肪�Ƃ��B
��p�u���E�U�����邩�A���������g�����Ƃ������߂��܂��B
> �u�p�^���ʂ̑��a���[���v�Ƃ����̂́A���W���[�ǂ��납�A���\���炵�ĂȂ��ł��B
���\���ĂȂ���������ȂƂ���ɏ����Ă��܂��Ă����낤������B
�����ƃ��O���c���H
> ���ɐ����Ɂu���i�́v��������u�e�R�v�̃��J�j�Y��
����́A�n�T�~��Б��̃O���b�v����_�Łi��]�͏o����悤�Ɂj�Œ肵�āA
�����̃O���b�v���J���ƁA�x�_���ړ�������ăC���[�W�ŗǂ���ł��傤���H
�z���_��ASIMO�i�A�V���j
ttp://that3.2ch.net/test/read.cgi/robot/1047403193/261-
>>107
�����Ă���Ă��肪�Ƃ��B
��p�u���E�U�����邩�A���������g�����Ƃ������߂��܂��B
> �u�p�^���ʂ̑��a���[���v�Ƃ����̂́A���W���[�ǂ��납�A���\���炵�ĂȂ��ł��B
���\���ĂȂ���������ȂƂ���ɏ����Ă��܂��Ă����낤������B
�����ƃ��O���c���H
> ���ɐ����Ɂu���i�́v��������u�e�R�v�̃��J�j�Y��
����́A�n�T�~��Б��̃O���b�v����_�Łi��]�͏o����悤�Ɂj�Œ肵�āA
�����̃O���b�v���J���ƁA�x�_���ړ�������ăC���[�W�ŗǂ���ł��傤���H
113 �F���J�����������F04/12/07 20:48:23 ID:UrQZfekN
���ƁA�O�O��Ɗp�^���ʂ̑��a�ɂ��ď����Ă�l�͈ꉞ����ˁB
�T�C�g�������ĂāA�C���^�[�l�b�g�A�[�J�C�u�ɂ��c���ĂȂ��̂ŁAGoogle�̃L���b�V���B
ttp://www.google.co.jp/search?q=cache:IwMojj2GLJEJ:www2.kobe-u.ac.jp/~ksaito/bushi/v11n1f.html
�����̂ňꕔ���p>-----------------------------------------------------
�@���B�̐g�̂̉^���́A���Ƌ����ʊ�Ƃ��čs����B���������āA
�g�̂̕`���^���́A�߂���čs�Ȃ���l�X�Ȍ`�Ԃ̉�]�^��(�p�^��)
�̑��a����Ȃ�A�Ɨ�������̉^���n���Ȃ��Ă��邱�Ƃɑ傫�ȓ��������B
��Ȃ��ɂ�钼���̕��s�`�Ԃ�I�������l�Ԃ́A���x�ɔ��B�����_�o��
�����āA���������l�X�ȉ�]�^���̐���(�p�^����)���o�����X�����Ȃ���A
�ړI�̉^���𐋍s���Ă����B�^���̊w�K�Ƃ��A�K�n�Ƃ����̂́A���s����ӎu�I��
�^���̎i�߂ɂ���Đ��܂���]�^�����A�t�B�[�h�E�o�b�N�@�\�����
�⏞����^���n���ǂ̂悤�ɐ��������邩�A�Ƃ������Ƃł����āA
���̂悤�ȑS�̓I�ȉ^���n�̐������D�ꂽ�^���̂��߂̕K�v�����ƂȂ�B
�܂�A�^���n�̃o�����X�ێ��̂��߂ɂ́A�ړI�̉^���̂��߂ɒ��ڐ�����
�ӎ��I�ȉ�]�^���̐���(�p�^����)�E�����]�^���������A
�����̉�]�^���̐���(�p�^����)�̑��a���ɂ���̂ł���B
�����A�s�p�^���ʕۑ����t����������͈͂ʼn^�������s�����悢�B
�A���f���Z���k'84�I�����s�b�N���A���q�}���\���I��l�̃S�[���O�̋ꓬ�́A
�ޏ��̃t�B�[�h�E�o�b�N�@�\����J���ނ̂��߂Ɋ��ɋ@�\���~���Ă���A
�ӎu�����ŐU��o����鑫�̊p�^���ʂ�ۑ����Ă����⏞�^����
�����Ȃ��Ȃ��Ă������ƂɋN��������̂ł������B
�g�̂̂���h��S�Ď�������ԂƂ����̂͂��̂悤�ȏ�Ԃ������̂ł���B
�i���� ����u�̂̂���v�}�g��w�o�h�~���g��������Vol.11 No.1�A1988�N�j
�T�C�g�������ĂāA�C���^�[�l�b�g�A�[�J�C�u�ɂ��c���ĂȂ��̂ŁAGoogle�̃L���b�V���B
ttp://www.google.co.jp/search?q=cache:IwMojj2GLJEJ:www2.kobe-u.ac.jp/~ksaito/bushi/v11n1f.html
�����̂ňꕔ���p>-----------------------------------------------------
�@���B�̐g�̂̉^���́A���Ƌ����ʊ�Ƃ��čs����B���������āA
�g�̂̕`���^���́A�߂���čs�Ȃ���l�X�Ȍ`�Ԃ̉�]�^��(�p�^��)
�̑��a����Ȃ�A�Ɨ�������̉^���n���Ȃ��Ă��邱�Ƃɑ傫�ȓ��������B
��Ȃ��ɂ�钼���̕��s�`�Ԃ�I�������l�Ԃ́A���x�ɔ��B�����_�o��
�����āA���������l�X�ȉ�]�^���̐���(�p�^����)���o�����X�����Ȃ���A
�ړI�̉^���𐋍s���Ă����B�^���̊w�K�Ƃ��A�K�n�Ƃ����̂́A���s����ӎu�I��
�^���̎i�߂ɂ���Đ��܂���]�^�����A�t�B�[�h�E�o�b�N�@�\�����
�⏞����^���n���ǂ̂悤�ɐ��������邩�A�Ƃ������Ƃł����āA
���̂悤�ȑS�̓I�ȉ^���n�̐������D�ꂽ�^���̂��߂̕K�v�����ƂȂ�B
�܂�A�^���n�̃o�����X�ێ��̂��߂ɂ́A�ړI�̉^���̂��߂ɒ��ڐ�����
�ӎ��I�ȉ�]�^���̐���(�p�^����)�E�����]�^���������A
�����̉�]�^���̐���(�p�^����)�̑��a���ɂ���̂ł���B
�����A�s�p�^���ʕۑ����t����������͈͂ʼn^�������s�����悢�B
�A���f���Z���k'84�I�����s�b�N���A���q�}���\���I��l�̃S�[���O�̋ꓬ�́A
�ޏ��̃t�B�[�h�E�o�b�N�@�\����J���ނ̂��߂Ɋ��ɋ@�\���~���Ă���A
�ӎu�����ŐU��o����鑫�̊p�^���ʂ�ۑ����Ă����⏞�^����
�����Ȃ��Ȃ��Ă������ƂɋN��������̂ł������B
�g�̂̂���h��S�Ď�������ԂƂ����̂͂��̂悤�ȏ�Ԃ������̂ł���B
�i���� ����u�̂̂���v�}�g��w�o�h�~���g��������Vol.11 No.1�A1988�N�j
114 �F���J�����������F04/12/07 21:08:59 ID:UrQZfekN
>>109
����i�Ȃ݂����j�ɂ��ẮA���{�b�g�ւ̉��p����������Ă��āA
����i�Ȃ݂����j�ŕ������s���{�b�g�̌���
ttp://www.namiashi.com/hihoukan/uedatoukou2.htm
���擙�̎���
ttp://robotics.aist-nara.ac.jp/research/hrp2/
���ł́A���̐U��o���ɉ����āA���[�����g��⏞����悤��
������]�����邱�ƂŁA�����ɓ`��郂�[�����g������������
���Ƃ��o����A�Ƃ������ʂ��o�Ă���B
����i�Ȃ݂����j�ɂ��ẮA���{�b�g�ւ̉��p����������Ă��āA
����i�Ȃ݂����j�ŕ������s���{�b�g�̌���
ttp://www.namiashi.com/hihoukan/uedatoukou2.htm
���擙�̎���
ttp://robotics.aist-nara.ac.jp/research/hrp2/
���ł́A���̐U��o���ɉ����āA���[�����g��⏞����悤��
������]�����邱�ƂŁA�����ɓ`��郂�[�����g������������
���Ƃ��o����A�Ƃ������ʂ��o�Ă���B
115 �F���J�����������F04/12/07 21:26:39 ID:UrQZfekN
114�⑫
������ǂނƁA����̓��{�b�g�Ɍ����Ă����ȋC�͂���B
�ł��A��̃��[�V�����L���v�`���̓���Ƃ��������
�Ȃ�ƂȂ��s����Ȋ����Ƃ������A�s���R���������Ă��܂���ˁB
������ǂނƁA����̓��{�b�g�Ɍ����Ă����ȋC�͂���B
�ł��A��̃��[�V�����L���v�`���̓���Ƃ��������
�Ȃ�ƂȂ��s����Ȋ����Ƃ������A�s���R���������Ă��܂���ˁB
116 �F���J�����������F04/12/07 21:43:20 ID:1HIyG9DK
>>95=101
�����Ă邱�Ƃ͂Ȃ�ƂȂ��`�����A
�E�r�^���͍�p����p�̖@���������Ƃ�����̂Ȃ̂ŁA�ǂ�ȓ��������悤�ƁA���ǂ͔��́{�d�͂����i�͂ƂȂ�B�u���͂ɂ��Ȃ��v�ƌ����ƁA�d�͈ȊO�ɋ쓮�͂������Ȃ�(i.e.�����ȊO�̉^���͂��Ȃ�)�Ƃ������ƂɂȂ�B
�E�p�^���ʂ́A��Ԃɂ���_���Ƃ����Ƃ��ɁA���̓_�܂��ɏ��߂Ē�`�ł���(i.e.�u�_P�܂��́v�Ƃ����������������s����)���̂Ȃ̂ŁA�u�p�^���ʂ̑��a��0�v�Ƃ����\�����̕s���R�ł���(���������ɕ����Ă�Ԃ͔C�ӂ̓_�܂��̊p�^���ʂ�0�ƂȂ�)�B
����ɂ��āA�ǂ���B
�����Ă邱�Ƃ͂Ȃ�ƂȂ��`�����A
�E�r�^���͍�p����p�̖@���������Ƃ�����̂Ȃ̂ŁA�ǂ�ȓ��������悤�ƁA���ǂ͔��́{�d�͂����i�͂ƂȂ�B�u���͂ɂ��Ȃ��v�ƌ����ƁA�d�͈ȊO�ɋ쓮�͂������Ȃ�(i.e.�����ȊO�̉^���͂��Ȃ�)�Ƃ������ƂɂȂ�B
�E�p�^���ʂ́A��Ԃɂ���_���Ƃ����Ƃ��ɁA���̓_�܂��ɏ��߂Ē�`�ł���(i.e.�u�_P�܂��́v�Ƃ����������������s����)���̂Ȃ̂ŁA�u�p�^���ʂ̑��a��0�v�Ƃ����\�����̕s���R�ł���(���������ɕ����Ă�Ԃ͔C�ӂ̓_�܂��̊p�^���ʂ�0�ƂȂ�)�B
����ɂ��āA�ǂ���B
117 �F95=101�F04/12/08 00:09:43 ID:/Lr17rAU
>>113 �悭����Ȃ̂������Ă���܂����ˁB���肪�Ƃ��B���̈��� ����Ƃ������̏q�ׂ�
�����邱�ƂƁA�قƂ�Ǔ������Ƃł��B�قƂ�ǁc�ꕔ�A���ȁH�@�A���f���Z���̃S�[���O��
�b�́A����͑S�R�Ⴄ���ƂɂȂ����܂��܂��ˁB�����l���Ă���̂́A�ӎ��I���邢�͔��˓I��
����ɂ��p�^���ʂ̕⏞�^���ł͂Ȃ��āA���ӎ��A�����I�ȕ⏞�w�^���x�Ƃ������A�w�͂̔����x
�Ƃ����������������Ă�Ǝv���܂��B
�n�T�~�̃C���[�W�́A����͐}���ł͈Ⴄ��ł����A�����ł��B�m���Ƀn�T�~�̎x�_�������̂�
�������ƂɂȂ�܂��ˁB����͋C�����Ȃ������B���͐����p�̃r�f�I������Ă����ł����A
���̒��Ŏg���Ă���͌^�́A�m���ɐn���O���b�v���Ȃ��A����̓n�T�~�ł��B
�����邱�ƂƁA�قƂ�Ǔ������Ƃł��B�قƂ�ǁc�ꕔ�A���ȁH�@�A���f���Z���̃S�[���O��
�b�́A����͑S�R�Ⴄ���ƂɂȂ����܂��܂��ˁB�����l���Ă���̂́A�ӎ��I���邢�͔��˓I��
����ɂ��p�^���ʂ̕⏞�^���ł͂Ȃ��āA���ӎ��A�����I�ȕ⏞�w�^���x�Ƃ������A�w�͂̔����x
�Ƃ����������������Ă�Ǝv���܂��B
�n�T�~�̃C���[�W�́A����͐}���ł͈Ⴄ��ł����A�����ł��B�m���Ƀn�T�~�̎x�_�������̂�
�������ƂɂȂ�܂��ˁB����͋C�����Ȃ������B���͐����p�̃r�f�I������Ă����ł����A
���̒��Ŏg���Ă���͌^�́A�m���ɐn���O���b�v���Ȃ��A����̓n�T�~�ł��B
118 �F95=101�F04/12/08 00:12:33 ID:/Lr17rAU
�̓���́A�܂��Ƀn�T�~�Ő��������܂��B���A�u���i�͂̍l�@�����v�̓_�҂�
�����Ă邱�Ƃ��E�ۂ݂ɂ��Ă��猤���͒x�X�Ƃ��Đi�ނ��Ƃ͂Ȃ��ł��傤�B
��E�E�ɁE����悤�ɂ͂Ȃ�܂���B�ނ����}�̂��ꓯ�́A����ȂǕ�����
���Ƃ��Ȃ��O���̈ꗬ�A�X���[�g�̂��ׂĂ��u������}�X�^�[���Ă���v�ƁA����
���Ă��܂��B���_�ʑ��ɓ�����Ȃ����H�ƁA�@���̐��Ƃɕ����Ă݂������炢�ł���B
����Ȃ킯�ł�����A����}�̂g�o�ɏ����Ă��邱�Ƃ�ǂ߂A����̓��{�b�g��
�����Ă���Ɗ�����͓̂��R�ł��傤�ˁB
>>116�@[�r�^���͍�p����p�̖@���������Ƃ�����̂Ȃ̂ŁA�ǂ�ȓ��������悤�ƁA
���ǂ͔��́{�d�͂����i�͂ƂȂ�B]������͕������Ƃ��ł���Ǝv���܂��B�Ƃ������A
����͏��߂���Ԉ���Ă�����ł���B�u��������v�Ƃ����ۑ�ł͔��͂𐄐i�͂�
���Ă����疵�����炯�ŁA�܂�����Ƃ��Ė����Ȑ������ł��邱�Ƃ͂Ȃ���ł���B
�d�͂͐��i�͂ƒ��p�̕����ł�����A��ؐ��i�͂ɂȂ邱�Ƃ͂���܂���B
�u���́{�d�́v�𐄐i�͂ɂ�����@���AMIT�̐l���N���Q�ł��B������u�l�Ԃ炵��
�����s�v���ƑË����邱�Ƃ��A���Ȃ��͗ǂ��Ƃ������ł����H
�����Ă邱�Ƃ��E�ۂ݂ɂ��Ă��猤���͒x�X�Ƃ��Đi�ނ��Ƃ͂Ȃ��ł��傤�B
��E�E�ɁE����悤�ɂ͂Ȃ�܂���B�ނ����}�̂��ꓯ�́A����ȂǕ�����
���Ƃ��Ȃ��O���̈ꗬ�A�X���[�g�̂��ׂĂ��u������}�X�^�[���Ă���v�ƁA����
���Ă��܂��B���_�ʑ��ɓ�����Ȃ����H�ƁA�@���̐��Ƃɕ����Ă݂������炢�ł���B
����Ȃ킯�ł�����A����}�̂g�o�ɏ����Ă��邱�Ƃ�ǂ߂A����̓��{�b�g��
�����Ă���Ɗ�����͓̂��R�ł��傤�ˁB
>>116�@[�r�^���͍�p����p�̖@���������Ƃ�����̂Ȃ̂ŁA�ǂ�ȓ��������悤�ƁA
���ǂ͔��́{�d�͂����i�͂ƂȂ�B]������͕������Ƃ��ł���Ǝv���܂��B�Ƃ������A
����͏��߂���Ԉ���Ă�����ł���B�u��������v�Ƃ����ۑ�ł͔��͂𐄐i�͂�
���Ă����疵�����炯�ŁA�܂�����Ƃ��Ė����Ȑ������ł��邱�Ƃ͂Ȃ���ł���B
�d�͂͐��i�͂ƒ��p�̕����ł�����A��ؐ��i�͂ɂȂ邱�Ƃ͂���܂���B
�u���́{�d�́v�𐄐i�͂ɂ�����@���AMIT�̐l���N���Q�ł��B������u�l�Ԃ炵��
�����s�v���ƑË����邱�Ƃ��A���Ȃ��͗ǂ��Ƃ������ł����H
119 �F95=101�F04/12/08 00:15:37 ID:/Lr17rAU
>>116 �@�����݂����ȓ����ɂȂ�܂����B
�w�p�^���ʁx�Ƃ������t�ɂ��ẮA�ʂ����ēK���ǂ����H�́A���͋^��Ɏv���Ă��܂��B
�K���ȌĂі����l�����Ȃ����̂ŁA�m���Ă�P��̒�����߂��C���[�W�̂��̂����Ղ�
�I�ɂ����܂���B����Łw�����x�̂܂܂�10�N�߂��������炩���Ă���킯�ł��B
�����܂����Ȃ�܂����A�����̖ړI���u��������v���ƂȂ̂ŁA�u����̋r�����ƁA
��������ɔ��̌����̓�����������ׂ��A�͂���������v�Ƃ����u���g�v����ɓ����
���������Ă������̂ŁA������p�^���ʂƌĂԂ̂��K�Ȃ̂��ǂ����ɂ͂��܂苻���͖�����ł��B
�ŁA���������Ƃ���ɏ����Ă��A�ŏI�I�ɓ��B�����u����̋ɈӁv�ɑ��̐l�����ǂ蒅�����Ƃ�
��ɖ����Ɗm�M���Ă܂�����A�܂��A���v�ł��傤�B����قǐl�Ԃ̑���ɂ͓�����G��
�J���N���������Ă��܂��B���A�������A���ۂ̓���͊ȒP�Ȃ�ł����ǂˁB
�w�p�^���ʁx�Ƃ������t�ɂ��ẮA�ʂ����ēK���ǂ����H�́A���͋^��Ɏv���Ă��܂��B
�K���ȌĂі����l�����Ȃ����̂ŁA�m���Ă�P��̒�����߂��C���[�W�̂��̂����Ղ�
�I�ɂ����܂���B����Łw�����x�̂܂܂�10�N�߂��������炩���Ă���킯�ł��B
�����܂����Ȃ�܂����A�����̖ړI���u��������v���ƂȂ̂ŁA�u����̋r�����ƁA
��������ɔ��̌����̓�����������ׂ��A�͂���������v�Ƃ����u���g�v����ɓ����
���������Ă������̂ŁA������p�^���ʂƌĂԂ̂��K�Ȃ̂��ǂ����ɂ͂��܂苻���͖�����ł��B
�ŁA���������Ƃ���ɏ����Ă��A�ŏI�I�ɓ��B�����u����̋ɈӁv�ɑ��̐l�����ǂ蒅�����Ƃ�
��ɖ����Ɗm�M���Ă܂�����A�܂��A���v�ł��傤�B����قǐl�Ԃ̑���ɂ͓�����G��
�J���N���������Ă��܂��B���A�������A���ۂ̓���͊ȒP�Ȃ�ł����ǂˁB
120 �F���J�����������F04/12/08 00:48:20 ID:LZKTPj8j
>>108
> ���R�N�����ł����A�Q�́u�Ҋ߁v�̊Ԋu��蓪�̕������͂邩�ɑ傫���ďd��
> �ł�����A�Ҋ߂Ő�����w�˂���x�Ȃǂ̗͂́A�������[�����g���͂邩�ɑ傫��
> ���̕����ŋz�����Ă��܂���킯�ł��B
����͒������̂̂��郍�{�b�g�������B
�u�l�����N���Q�v�Ƃ͕����ɂ��݂ɂ����������Ȃ����B
�u�l�����N���Q�v�ƌĂԂȂ�A
���Ȃ��Ƃ��������Ƃ�����Ă���n���ɂ�����ǂ��ł����H
���̃N���Q�̓��[�r�[���Ȃ��Ȃ��Ă��܂��Ă���悤�ł����A
���Ԃ�����܂���B������ĂˁB
> ���R�N�����ł����A�Q�́u�Ҋ߁v�̊Ԋu��蓪�̕������͂邩�ɑ傫���ďd��
> �ł�����A�Ҋ߂Ő�����w�˂���x�Ȃǂ̗͂́A�������[�����g���͂邩�ɑ傫��
> ���̕����ŋz�����Ă��܂���킯�ł��B
����͒������̂̂��郍�{�b�g�������B
�u�l�����N���Q�v�Ƃ͕����ɂ��݂ɂ����������Ȃ����B
�u�l�����N���Q�v�ƌĂԂȂ�A
���Ȃ��Ƃ��������Ƃ�����Ă���n���ɂ�����ǂ��ł����H
���̃N���Q�̓��[�r�[���Ȃ��Ȃ��Ă��܂��Ă���悤�ł����A
���Ԃ�����܂���B������ĂˁB
121 �F104�F04/12/08 01:04:18 ID:d5xliKaM
>>117
���߂ɘ_���ɂ��Ė���āA�}��t���̕����ǂ݂����C�����܂��B
>>118
�����ށA�������ł��ˁB
> �̓���́A�܂��Ƀn�T�~�Ő��������܂��B
�n�T�~�Ő����̕t���̓���Ƃ́A����S���P��Ȃ�
�i���ƌ��̈ʑ������ʑ���0���j�ł̕��s���Ǝv���܂����A
>>114�ŋ������T�C�g�̐����ł��A����́u�Ȃ�v�̌���������ł���A
�u����v�ł͂��̂悤�ȒP���ȉ^���͍s���Ă��Ȃ��Ƃ��Ă��܂��B
> ����}�̂g�o�ɏ����Ă��邱�Ƃ�ǂ߂A
�܂��A3�������[�V�����L���v�`�����u�Ȃǂ��g���A
�̉^���Ƃ́A�{���ɓʼn�]���Ă���̂�����
��͂����݂�ȂǁA�q�ϓI�ȕ��͂Ɋ�Â��Ă���A
�����ȗ���ŏ�����Ă���Ǝv���܂��B
����ł����Ă��O����ϑ�����ƁA���S����
���������t���Ȃ��Ȃǖʔ������ʂ��o�Ă܂���B
���̐��ʂ����s�Ɏg���邩�ǂ����͂킩��܂��A
�����ł̃��[���̃��[�����g�����点��̂Ŋ���₷��
�H�ʂȂǂ̕��s�Ō��ʂ͂��邩�ȂƎv���܂��B
�Ȃ�ɂ���A�l�Ԃ̉^����������悤�Ƃ��鎎�݂͏d�v�ł���ˁB
���߂ɘ_���ɂ��Ė���āA�}��t���̕����ǂ݂����C�����܂��B
>>118
�����ށA�������ł��ˁB
> �̓���́A�܂��Ƀn�T�~�Ő��������܂��B
�n�T�~�Ő����̕t���̓���Ƃ́A����S���P��Ȃ�
�i���ƌ��̈ʑ������ʑ���0���j�ł̕��s���Ǝv���܂����A
>>114�ŋ������T�C�g�̐����ł��A����́u�Ȃ�v�̌���������ł���A
�u����v�ł͂��̂悤�ȒP���ȉ^���͍s���Ă��Ȃ��Ƃ��Ă��܂��B
> ����}�̂g�o�ɏ����Ă��邱�Ƃ�ǂ߂A
�܂��A3�������[�V�����L���v�`�����u�Ȃǂ��g���A
�̉^���Ƃ́A�{���ɓʼn�]���Ă���̂�����
��͂����݂�ȂǁA�q�ϓI�ȕ��͂Ɋ�Â��Ă���A
�����ȗ���ŏ�����Ă���Ǝv���܂��B
����ł����Ă��O����ϑ�����ƁA���S����
���������t���Ȃ��Ȃǖʔ������ʂ��o�Ă܂���B
���̐��ʂ����s�Ɏg���邩�ǂ����͂킩��܂��A
�����ł̃��[���̃��[�����g�����点��̂Ŋ���₷��
�H�ʂȂǂ̕��s�Ō��ʂ͂��邩�ȂƎv���܂��B
�Ȃ�ɂ���A�l�Ԃ̉^����������悤�Ƃ��鎎�݂͏d�v�ł���ˁB
122 �F104�F04/12/08 01:14:31 ID:d5xliKaM
>>122
���������ォ��X����ǂݕԂ��Ă݂悤�ȁB
�ŁA���Ԃ�͈�ԏ�̓���ł܂������킯�����A
������ăx���g�R���x�A�[�̏�łȂ��Ă��\�Ȃ̂��ȁE�E�E�H
�ꎞ�I�ɗ����Œ��n���āA�R���x�A�[�̐������g����
��]���Ă�悤�ɂ���������ǁB
>>95=101
> ����炩�炷��ƁA�l�Ԃ̂悤�ɕ����āA����郍�{�b�g�̎����͂܂��܂�
> ���̂��Ă���Ƃ��������Ȃ��ȁB
�悯��A���̗��R���ڂ����������Ăق����B
���������ォ��X����ǂݕԂ��Ă݂悤�ȁB
�ŁA���Ԃ�͈�ԏ�̓���ł܂������킯�����A
������ăx���g�R���x�A�[�̏�łȂ��Ă��\�Ȃ̂��ȁE�E�E�H
�ꎞ�I�ɗ����Œ��n���āA�R���x�A�[�̐������g����
��]���Ă�悤�ɂ���������ǁB
>>95=101
> ����炩�炷��ƁA�l�Ԃ̂悤�ɕ����āA����郍�{�b�g�̎����͂܂��܂�
> ���̂��Ă���Ƃ��������Ȃ��ȁB
�悯��A���̗��R���ڂ����������Ăق����B
125 �F���J�����������F04/12/08 11:30:25 ID:1NSj246M
>�@[�r�^���͍�p����p�̖@���������Ƃ�����̂Ȃ̂ŁA�ǂ�ȓ��������悤�ƁA
> ���ǂ͔��́{�d�͂����i�͂ƂȂ�B]������͕������Ƃ��ł���Ǝv���܂��B�Ƃ������A
> ����͏��߂���Ԉ���Ă�����ł���B�u��������v�Ƃ����ۑ�ł͔��͂𐄐i�͂�
> ���Ă����疵�����炯�ŁA�܂�����Ƃ��Ė����Ȑ������ł��邱�Ƃ͂Ȃ���ł���B
�������A�j���[�g���͊w���l�o��B
����A�ԈႢ�Ƃ���������̓I�Ɏw�E������A���C�̂Ȃ����̏���S�͎������ė~�����B
> �d�͂͐��i�͂ƒ��p�̕����ł�����A��ؐ��i�͂ɂȂ邱�Ƃ͂���܂���B
�d�͂��Ȃ��ƁA���C�͂�͓̂����B
> ���ǂ͔��́{�d�͂����i�͂ƂȂ�B]������͕������Ƃ��ł���Ǝv���܂��B�Ƃ������A
> ����͏��߂���Ԉ���Ă�����ł���B�u��������v�Ƃ����ۑ�ł͔��͂𐄐i�͂�
> ���Ă����疵�����炯�ŁA�܂�����Ƃ��Ė����Ȑ������ł��邱�Ƃ͂Ȃ���ł���B
�������A�j���[�g���͊w���l�o��B
����A�ԈႢ�Ƃ���������̓I�Ɏw�E������A���C�̂Ȃ����̏���S�͎������ė~�����B
> �d�͂͐��i�͂ƒ��p�̕����ł�����A��ؐ��i�͂ɂȂ邱�Ƃ͂���܂���B
�d�͂��Ȃ��ƁA���C�͂�͓̂����B
126 �F���J�����������F04/12/08 11:37:32 ID:PbM68HCh
>�d�͂͐��i�͂ƒ��p�̕����ł�����A��ؐ��i�͂ɂȂ邱�Ƃ͂���܂���B
����A�q���ł��킩��܂���������Ȃ��H
���Ⴀ���X�|�[�c�̐��i�͂̓X�L�[����������Ă�Ƃł��������Ƃ�̂��H
�����炩�ɏd�͂����i�͂ɂȂ��Ƃ邾�낤���B
����A�q���ł��킩��܂���������Ȃ��H
���Ⴀ���X�|�[�c�̐��i�͂̓X�L�[����������Ă�Ƃł��������Ƃ�̂��H
�����炩�ɏd�͂����i�͂ɂȂ��Ƃ邾�낤���B
127 �F���J�����������F04/12/08 11:50:35 ID:lR/nY67A
�@�@�@�@�@�@�@�@�@�@�@�@��
�ǂ��ɂł�����ˁB���������A�z���B���{�b�g���₩�犊�藎�Ƃ�����l�G��A�����́B
�������ׂ��B
�ǂ��ɂł�����ˁB���������A�z���B���{�b�g���₩�犊�藎�Ƃ�����l�G��A�����́B
�������ׂ��B
129 �F���J�����������F04/12/08 13:36:39 ID:bxEKkDNh
�����������Ĉړ�����A���遁�|��Ȃ���ړ�����A���Ă̂͑ʖڂ��ȁH
�S�����Ă���ΓV������͏o���邯�ǁA����͖̂�������ˁB
�S�����Ă���ΓV������͏o���邯�ǁA����͖̂�������ˁB
130 �F���J�����������F04/12/08 13:42:30 ID:BiWZbFE6
>>126
>�d�͂͐��i�͂ƒ��p�̕����ł�����A
�ɑ��āA�X�Ζʂł̉^���̃X�L�[�������o������A�A�z�Ƃ����Ă��d���Ȃ�����B
���{�Ȃ�A���߂Ď��s���o���ė~�����ȁB
�����͂ō�����郍�{�b�g�Fttp://tam.cornell.edu/~ruina/hplab/downloads/movies/Steve_angle.mpg
>>95=101
> �d�͂͐��i�͂ƒ��p�̕����ł�����A��ؐ��i�͂ɂȂ邱�Ƃ͂���܂���B
�d�S��O�ɌX���A�|�ꂻ���ɂȂ�����Б���O�ɓ��ݏo�����ƂŁA
�g�̂�O�ɏo�����Ƃ��o���邪�A����͏d�͂����i�͂ɂȂ��ĂȂ��̂��H
�l�Ԃ͏d�S���ړ����邱�Ƃɂ��A�d�͂ɂ��ȃG�l���M�[�ȕ��s��
�\�ɂ��Ă���Ǝv���Ă����B
>�d�͂͐��i�͂ƒ��p�̕����ł�����A
�ɑ��āA�X�Ζʂł̉^���̃X�L�[�������o������A�A�z�Ƃ����Ă��d���Ȃ�����B
���{�Ȃ�A���߂Ď��s���o���ė~�����ȁB
�����͂ō�����郍�{�b�g�Fttp://tam.cornell.edu/~ruina/hplab/downloads/movies/Steve_angle.mpg
>>95=101
> �d�͂͐��i�͂ƒ��p�̕����ł�����A��ؐ��i�͂ɂȂ邱�Ƃ͂���܂���B
�d�S��O�ɌX���A�|�ꂻ���ɂȂ�����Б���O�ɓ��ݏo�����ƂŁA
�g�̂�O�ɏo�����Ƃ��o���邪�A����͏d�͂����i�͂ɂȂ��ĂȂ��̂��H
�l�Ԃ͏d�S���ړ����邱�Ƃɂ��A�d�͂ɂ��ȃG�l���M�[�ȕ��s��
�\�ɂ��Ă���Ǝv���Ă����B
131 �F���J�����������F04/12/08 19:11:49 ID:LZKTPj8j
>>122
> �ŁA���Ԃ�͈�ԏ�̓���ł܂������킯�����A
> ������ăx���g�R���x�A�[�̏�łȂ��Ă��\�Ȃ̂��ȁE�E�E�H
���n�ő���o���Ē��Ԃ肵�܂��B
�����瓮�悪�Ȃ����Č����Ă���̂��B
> �ŁA���Ԃ�͈�ԏ�̓���ł܂������킯�����A
> ������ăx���g�R���x�A�[�̏�łȂ��Ă��\�Ȃ̂��ȁE�E�E�H
���n�ő���o���Ē��Ԃ肵�܂��B
�����瓮�悪�Ȃ����Č����Ă���̂��B
132 �F���J�����������F04/12/08 20:38:52 ID:va/dPkd0
>>131 ����͖{�����H�@�^�킵���ȁB
���ꂪ�{���Ȃ牽�������u���Ă����̕��n�ő����Ē��Ԃ肷��̂��g�o�ɏo���͂������H
������f�J�f�J�ƁB�����ď��Ȃ��Ƃ������̘b��ɋ����������Ă���҂Ȃ�唼�͒m���Ă���
���炢�L���ɂȂ��Ă���Ǝv�����ȁB
���ꂪ�{���Ȃ牽�������u���Ă����̕��n�ő����Ē��Ԃ肷��̂��g�o�ɏo���͂������H
������f�J�f�J�ƁB�����ď��Ȃ��Ƃ������̘b��ɋ����������Ă���҂Ȃ�唼�͒m���Ă���
���炢�L���ɂȂ��Ă���Ǝv�����ȁB
>>131
���̐������Ⴛ��Ȃ��Ƃ킩��Ȃ����āB
�T���Ă݂��猩�������B�m���ɂł��Ă�B
ttp://www.itmedia.co.jp/news/0204/05/chugaeri.mpg
>>132
���ʂ����v����ȁB
���̐������Ⴛ��Ȃ��Ƃ킩��Ȃ����āB
�T���Ă݂��猩�������B�m���ɂł��Ă�B
ttp://www.itmedia.co.jp/news/0204/05/chugaeri.mpg
>>132
���ʂ����v����ȁB
134 �F132�F04/12/08 22:40:46 ID:TRfyyWvo
����Ⴗ�����B���ł����Ƙb��ɂȂ��ĂȂ��H�@�������掿�������ȁB
135 �F���J�����������F04/12/09 01:28:50 ID:jo9TUNNV
���s���{�b�g�ɂ́A��͂�ܐ悪�K�v���Ǝv���ȁB
>>130�̓���̃��{�b�g�́A���Ȃ莩�R�Ȋ����ŕ����Ă邯�ǁA
����͑������ȖʂɂȂ��Ă邩��ŁA���ʂ̑����ł͂����͂����܂��B
���Ƃ́A�G���܂������Ȃ��ĕ������ƁB���s�Ȃ�āA���̌�ł����C������B
>>130�̓���̃��{�b�g�́A���Ȃ莩�R�Ȋ����ŕ����Ă邯�ǁA
����͑������ȖʂɂȂ��Ă邩��ŁA���ʂ̑����ł͂����͂����܂��B
���Ƃ́A�G���܂������Ȃ��ĕ������ƁB���s�Ȃ�āA���̌�ł����C������B
136 �F95=101�F04/12/09 16:03:44 ID:ZDzAh4vv
����͉��̊ԈႢ�Ȃ̂��A�u�c����̓��e�͎�t�Ă��܂���v�Ƃ������b�Z�[�W���o�āA��������
�ł��܂���ł����B
�l�h�s�̃N���Q�̂������f���������ł��ˁB����͋r�ɁA�G�ɂ�������̂�����悤�ŁA�A�����J��
�v���o�X�P�b�g�őI�肪���O���A�i�E���X����ē��ꂵ�Ă������݂����Ȓe�ޑ���ł��ˁB
���̓����Ȃ�u����v�Ƃ����C���[�W�Ƃ��Ĉ�a���͖�����ł����A�r�̂Ȃ����̌`�̂܂܂ł�
�g�����͖����ł��傤�B���̃N���Q�́A���Ԃ�A�������������Ƃ͂ł��Ȃ���ł��傤���A
����Ɋւ��Ă͒N���m���Ă܂��H�@�����������ʂɂ͂��������N���N���������ł����A
���̋쓮�n�ł͂ǂ����u���������v�u���邾���v�̕������o���Ȃ������ŁA�����������Ƃ���
���疳�i�K�ő�������Ƃ���܂Ŕ��B������ɂ́A����ASIMO�̕��s�̐����ƁA����MIT�N���Q��
�s�����s��������̐����́A�������ď�Q�ɂȂ�̂�������܂���B
�������A122����A133�̓���͂悭�T���܂����ˁB�ǂ�����ĒT����ł����H
>>120 ����͒������̂̂��郍�{�b�g�������B������͓�������Ȃ��ł���B����]��
�Ђ˂�̋z���ł�����A�Q�{�̑��̊Ԋu�̏����ȉ�]���a�ɋN���鏬���Ȋ������[�����g��
�N���Q�̓��́A�ł������a�̊������[�����g�ɋz�������Ƃ������ƂŁA���ʂȂ����ς�
�l�ԂɎ����i�D�̂��̂����͂��Ȃ�ł����A�l�ɋ߂��`�ł͂��̓���͔��ɓ���Ȃ�
�܂��ˁB
�u�l�����N���Q�v���Ă̂́A�ʂɃo�J�ɂ��悤�Ƃ��Ă��Ȃ��ł���B�͊w�I�Ɏ��ɂ悭
�l���Č`�����肵���ȁA���āA���͊��S���Ă��܂��B�����ڂł͂���̓N���Q�ƌĂ�Ă�
�������Ȃ��ł���H�@���������q�l���������悩�����H�@
�������̂�����Ă��猾���ƌ����Ă��A����ȋ��͂���܂��疳���ł���B
�������܂��A���������Ă����������`�ł̓������͍̂��Ȃ��ł��ˁB
�ł��܂���ł����B
�l�h�s�̃N���Q�̂������f���������ł��ˁB����͋r�ɁA�G�ɂ�������̂�����悤�ŁA�A�����J��
�v���o�X�P�b�g�őI�肪���O���A�i�E���X����ē��ꂵ�Ă������݂����Ȓe�ޑ���ł��ˁB
���̓����Ȃ�u����v�Ƃ����C���[�W�Ƃ��Ĉ�a���͖�����ł����A�r�̂Ȃ����̌`�̂܂܂ł�
�g�����͖����ł��傤�B���̃N���Q�́A���Ԃ�A�������������Ƃ͂ł��Ȃ���ł��傤���A
����Ɋւ��Ă͒N���m���Ă܂��H�@�����������ʂɂ͂��������N���N���������ł����A
���̋쓮�n�ł͂ǂ����u���������v�u���邾���v�̕������o���Ȃ������ŁA�����������Ƃ���
���疳�i�K�ő�������Ƃ���܂Ŕ��B������ɂ́A����ASIMO�̕��s�̐����ƁA����MIT�N���Q��
�s�����s��������̐����́A�������ď�Q�ɂȂ�̂�������܂���B
�������A122����A133�̓���͂悭�T���܂����ˁB�ǂ�����ĒT����ł����H
>>120 ����͒������̂̂��郍�{�b�g�������B������͓�������Ȃ��ł���B����]��
�Ђ˂�̋z���ł�����A�Q�{�̑��̊Ԋu�̏����ȉ�]���a�ɋN���鏬���Ȋ������[�����g��
�N���Q�̓��́A�ł������a�̊������[�����g�ɋz�������Ƃ������ƂŁA���ʂȂ����ς�
�l�ԂɎ����i�D�̂��̂����͂��Ȃ�ł����A�l�ɋ߂��`�ł͂��̓���͔��ɓ���Ȃ�
�܂��ˁB
�u�l�����N���Q�v���Ă̂́A�ʂɃo�J�ɂ��悤�Ƃ��Ă��Ȃ��ł���B�͊w�I�Ɏ��ɂ悭
�l���Č`�����肵���ȁA���āA���͊��S���Ă��܂��B�����ڂł͂���̓N���Q�ƌĂ�Ă�
�������Ȃ��ł���H�@���������q�l���������悩�����H�@
�������̂�����Ă��猾���ƌ����Ă��A����ȋ��͂���܂��疳���ł���B
�������܂��A���������Ă����������`�ł̓������͍̂��Ȃ��ł��ˁB
137 �F95=101�F04/12/09 16:09:35 ID:ZDzAh4vv
>>�n�T�~�Ő����̕t���̓���Ƃ́A����S���P��Ȃ��i���ƌ��̈ʑ������ʑ���0���j�ł̕��s
���Ǝv���܂����A114�ŋ������T�C�g�̐����ł��A����́u�Ȃ�v�̌���������ł���A�u����v
�ł͂��̂悤�ȒP���ȉ^���͍s���Ă��Ȃ��Ƃ��Ă��܂��B
�n�T�~�́A�����[�Ђ˂�Ȃ��ł��ˁB�n�T�~�͔����̓S�������܂Ȃ����߂Ă���܂��B
�n�Ɛn�̊ԂɃ��b�V���[�Ȃ���Ă����Ȃ��ł�����ˁB�y�`�����R�̂Q���̐n�̑g�ݍ��킹�ł́A
����͂Ђ˂�͋N����ł���B�n�̑���ɓ�{�̖_���A�Ԃɉ����J�}���Ă���Ă݂�ƁA�Ђ˂肪
�����邱�Ƃ͉���܂��B�̐S�Ȃ̂́u���i�͂�������v�Ƃ������ƂŁA�n�T�~�œ̓���ɐ�����
�t������ƌ����̂́A�̓���Ő�����u���i�́v���A�n�T�~�����f���ɂ��Đ����ł���u�e�R�v��
���J�j�Y���ƈ�v����Ƃ������ƂȂ�ł���B�Ђ˂�̗L�����̂ɂ́A�{���A���ɂ��Ӗ��͂Ȃ���ł���B
�����������t���炸�Ő\���������ł��B
�u����ł͂��̂悤�ȒP���ȉ^���͍s���Ă��Ȃ��v�Ƃ����̂́A�ό`���Ȃ��ő́u�ł͂Ȃ��v�l�̂̉^�����A
�����܂܂Ō����Ă��ł��ˁB3�������[�V�����L���v�`���Ƃ����̂́A�v����Ɂu�����}���}�v���A����
�ڂ����A�ω�������₷���\���͂��Ă���܂����A�ł��ǂ��܂ŏڂ������Ă����Ă��u�����}���}�v�ł���
�Ȃ���ł���B
��L��MIT�N���Q�ł́A�r�Ő����Ă���u�Ђ˂�v�́A�ׂ��r��艽�{���傫�Ȏ��ʂƊ������[�����g������
�u�ό`���Ȃ��f�J�C�ł܂�v�ŋz�����Ă����ł����A�l�̂̏ꍇ�A�Q�{�̋r�ƁA�������̕����̎��ʂ�
�������[�����g�ɂ́u���{�v�Ƃ����悤�ȍ��͂���܂��A�㔼�g���J�`���J�`���Ɍł߂ĕ�������͕��ʂ�
���܂���A��A�z���ɕK�v�Ȃ����̂Ђ˂�͏㔼�g�Ɍ���܂��B
�P���łȂ��Ƃ����_�̈�ɁA���̂Ђ˂肪�S���̂P�������x�Y���Ă���Ƃ�����ł����A����́u�ł��Ȃ��v
�l�̂́A�������֏��ɂЂ˂肪�`����Ă��邩��ŁA���ƍ������̃��[�V�������������菭���Y���āi�x��āj
����Ƃ����̂́A�ϋɓI�ɘr��U��Ȃ��Ƃ�������ł͓��R�ł��傤�B
�ʏ�́A���R�ɘr��U��������ł��A�Ђ˂肪�������ɏ��ɓ`����Ă����͓̂������ƂȂ�ł����A�r���U���
���Ƃɂ���āA���͂��̔����ŁA�`����Ă����u�Ђ˂�̕�v�Ƃ͈Ⴄ���������܂��B
�łȂ�����ł�136�x�Y����Ƃ������Ă���܂����A����͐l�ɂ��A�܂��r�̐U����ɂ���āA�܂��܂���
�Ȃ�܂��B
���Ǝv���܂����A114�ŋ������T�C�g�̐����ł��A����́u�Ȃ�v�̌���������ł���A�u����v
�ł͂��̂悤�ȒP���ȉ^���͍s���Ă��Ȃ��Ƃ��Ă��܂��B
�n�T�~�́A�����[�Ђ˂�Ȃ��ł��ˁB�n�T�~�͔����̓S�������܂Ȃ����߂Ă���܂��B
�n�Ɛn�̊ԂɃ��b�V���[�Ȃ���Ă����Ȃ��ł�����ˁB�y�`�����R�̂Q���̐n�̑g�ݍ��킹�ł́A
����͂Ђ˂�͋N����ł���B�n�̑���ɓ�{�̖_���A�Ԃɉ����J�}���Ă���Ă݂�ƁA�Ђ˂肪
�����邱�Ƃ͉���܂��B�̐S�Ȃ̂́u���i�͂�������v�Ƃ������ƂŁA�n�T�~�œ̓���ɐ�����
�t������ƌ����̂́A�̓���Ő�����u���i�́v���A�n�T�~�����f���ɂ��Đ����ł���u�e�R�v��
���J�j�Y���ƈ�v����Ƃ������ƂȂ�ł���B�Ђ˂�̗L�����̂ɂ́A�{���A���ɂ��Ӗ��͂Ȃ���ł���B
�����������t���炸�Ő\���������ł��B
�u����ł͂��̂悤�ȒP���ȉ^���͍s���Ă��Ȃ��v�Ƃ����̂́A�ό`���Ȃ��ő́u�ł͂Ȃ��v�l�̂̉^�����A
�����܂܂Ō����Ă��ł��ˁB3�������[�V�����L���v�`���Ƃ����̂́A�v����Ɂu�����}���}�v���A����
�ڂ����A�ω�������₷���\���͂��Ă���܂����A�ł��ǂ��܂ŏڂ������Ă����Ă��u�����}���}�v�ł���
�Ȃ���ł���B
��L��MIT�N���Q�ł́A�r�Ő����Ă���u�Ђ˂�v�́A�ׂ��r��艽�{���傫�Ȏ��ʂƊ������[�����g������
�u�ό`���Ȃ��f�J�C�ł܂�v�ŋz�����Ă����ł����A�l�̂̏ꍇ�A�Q�{�̋r�ƁA�������̕����̎��ʂ�
�������[�����g�ɂ́u���{�v�Ƃ����悤�ȍ��͂���܂��A�㔼�g���J�`���J�`���Ɍł߂ĕ�������͕��ʂ�
���܂���A��A�z���ɕK�v�Ȃ����̂Ђ˂�͏㔼�g�Ɍ���܂��B
�P���łȂ��Ƃ����_�̈�ɁA���̂Ђ˂肪�S���̂P�������x�Y���Ă���Ƃ�����ł����A����́u�ł��Ȃ��v
�l�̂́A�������֏��ɂЂ˂肪�`����Ă��邩��ŁA���ƍ������̃��[�V�������������菭���Y���āi�x��āj
����Ƃ����̂́A�ϋɓI�ɘr��U��Ȃ��Ƃ�������ł͓��R�ł��傤�B
�ʏ�́A���R�ɘr��U��������ł��A�Ђ˂肪�������ɏ��ɓ`����Ă����͓̂������ƂȂ�ł����A�r���U���
���Ƃɂ���āA���͂��̔����ŁA�`����Ă����u�Ђ˂�̕�v�Ƃ͈Ⴄ���������܂��B
�łȂ�����ł�136�x�Y����Ƃ������Ă���܂����A����͐l�ɂ��A�܂��r�̐U����ɂ���āA�܂��܂���
�Ȃ�܂��B
138 �F95=101�F04/12/09 16:16:03 ID:ZDzAh4vv
�u����ł����Ă��O����ϑ�����ƁA���S���ƌ��������t���Ȃ��v�Ƃ����̂͊m����
�ʔ����ł��ˁB�ʂ̈Ӗ��ŁB����}�̕��́A�O���̈ꗬ�A�X���[�g������ΑS�����A
������}�X�^�[���Ă���ƌ����āA���{�̃A�X���[�g�ɂ͓�����}�X�^�[����
����I��͋H���A�ƌ����Ă���킯�ŁA����}�̕��ɂ́u�����������v�Ƃ�������
�ł�����ˁB
���ʁA���������̂́u�v�����݁v�ƌĂԂ̂ł����A����ł��ނ�̒���́u����
���i�͂�������e�R�̃��J�j�Y���v�Ɠ������ۂ��N�����Ă͂����ł���B
130�����>>�d�S��O�ɌX���A�|�ꂻ���ɂȂ�����Б���O�ɓ��ݏo�����ƂŁA�g�̂�
�O�ɏo�����Ƃ��o���邪�A����͏d�͂����i�͂ɂȂ��ĂȂ��̂��H�@ ������́u�Б���
�O�ɓ��ݏo���v�Ƃ����Ƃ���Ƀ~�\������܂��B���ꂪ����ō��ɐ��i�͂���������
�G�b�Z���X�Ȃ�ł���B�F����A�����ɂ��������Ă݂ĉ������B�ʂɏd�S��O�ɌX���A
�|�ꂻ���ɂȂ����肷��K�v�͂���܂���B�����P�ɂ܂����������ĕБ���O�ɏo��������
�i�݂܂���B����͊y�ɂ����Ɠ����܂�����A�u�d�͂ɂ��ȃG�l���M�[�ȕ��s�v�ł����
�v���Ă��s�v�c�ł͂Ȃ���ł����A�悭�l���Ă݂ĉ������A�d�͂𐄐i�͂Ɏg���Ă���̂Ȃ�A
�₦�������������Ă���K�v������܂��B�X�L�[�́A�ꌩ�i��ł���悤�Ɍ����܂����A
����͂��₩�ȎΖʂɉ����Ă��₩�ɗ������Ă����Ă��邾���Ȃ�ł��ˁB
�d�S���ړ������邱�Ƃɂ���āA�ƁA�悭�����܂��B�u�d�S�ړ��ő���v�Ƃ����̂́A
�Ƃ��錳�{�f�B�r���_�[�������o���čL�܂��Ă��܂�����ł����A�����̃X���ɏW���A
�����炭�݂�ȗ��n���낤�ƌ��߂��Ă��܂��܂����A�݂Ȃ���́u�d�S�ړ��ő���v
�Ȃ�Ă̂ɂ͊�������߂邩�A�@�ł������Ȃ��Ƃ�����ł���B�j���[�g���͊w��
���A���̗͂������ɕ��͈̂ړ����Ȃ���ł�����ˁB�d�S�Ƃ����͕̂��̂̒���
�����ł�����A�u�d�S�ړ��ő���v�Ȃ�Ă̂́u�������瓮���v�ƌ����Ă�̂�
�����Ȃ킯�ł���B�u�j���[�g���͊w�v�́A�]�܂ŋؓ����H�Ƌ^�������Ȃ錳�{�f�B
�r���_�[�ɂ���ĂƂ����ɔj���Ă����H�I
�ʔ����ł��ˁB�ʂ̈Ӗ��ŁB����}�̕��́A�O���̈ꗬ�A�X���[�g������ΑS�����A
������}�X�^�[���Ă���ƌ����āA���{�̃A�X���[�g�ɂ͓�����}�X�^�[����
����I��͋H���A�ƌ����Ă���킯�ŁA����}�̕��ɂ́u�����������v�Ƃ�������
�ł�����ˁB
���ʁA���������̂́u�v�����݁v�ƌĂԂ̂ł����A����ł��ނ�̒���́u����
���i�͂�������e�R�̃��J�j�Y���v�Ɠ������ۂ��N�����Ă͂����ł���B
130�����>>�d�S��O�ɌX���A�|�ꂻ���ɂȂ�����Б���O�ɓ��ݏo�����ƂŁA�g�̂�
�O�ɏo�����Ƃ��o���邪�A����͏d�͂����i�͂ɂȂ��ĂȂ��̂��H�@ ������́u�Б���
�O�ɓ��ݏo���v�Ƃ����Ƃ���Ƀ~�\������܂��B���ꂪ����ō��ɐ��i�͂���������
�G�b�Z���X�Ȃ�ł���B�F����A�����ɂ��������Ă݂ĉ������B�ʂɏd�S��O�ɌX���A
�|�ꂻ���ɂȂ����肷��K�v�͂���܂���B�����P�ɂ܂����������ĕБ���O�ɏo��������
�i�݂܂���B����͊y�ɂ����Ɠ����܂�����A�u�d�͂ɂ��ȃG�l���M�[�ȕ��s�v�ł����
�v���Ă��s�v�c�ł͂Ȃ���ł����A�悭�l���Ă݂ĉ������A�d�͂𐄐i�͂Ɏg���Ă���̂Ȃ�A
�₦�������������Ă���K�v������܂��B�X�L�[�́A�ꌩ�i��ł���悤�Ɍ����܂����A
����͂��₩�ȎΖʂɉ����Ă��₩�ɗ������Ă����Ă��邾���Ȃ�ł��ˁB
�d�S���ړ������邱�Ƃɂ���āA�ƁA�悭�����܂��B�u�d�S�ړ��ő���v�Ƃ����̂́A
�Ƃ��錳�{�f�B�r���_�[�������o���čL�܂��Ă��܂�����ł����A�����̃X���ɏW���A
�����炭�݂�ȗ��n���낤�ƌ��߂��Ă��܂��܂����A�݂Ȃ���́u�d�S�ړ��ő���v
�Ȃ�Ă̂ɂ͊�������߂邩�A�@�ł������Ȃ��Ƃ�����ł���B�j���[�g���͊w��
���A���̗͂������ɕ��͈̂ړ����Ȃ���ł�����ˁB�d�S�Ƃ����͕̂��̂̒���
�����ł�����A�u�d�S�ړ��ő���v�Ȃ�Ă̂́u�������瓮���v�ƌ����Ă�̂�
�����Ȃ킯�ł���B�u�j���[�g���͊w�v�́A�]�܂ŋؓ����H�Ƌ^�������Ȃ錳�{�f�B
�r���_�[�ɂ���ĂƂ����ɔj���Ă����H�I
139 �F95=101�F04/12/09 16:19:08 ID:ZDzAh4vv
>>125 ����������ƌ����Ă���̂̓j���[�g���͊w�ł͂Ȃ��āA�u����v�Ɋւ��Ă̏펯�A
����ł���B>>�r�^���͍�p����p�̖@���������Ƃ�����̂Ȃ̂Ł@������Ȃ͕̂�����
���Ƃ��Ȃ�����ǁA���͂������i�͂ɐ��蓾�Ȃ��Ƃ����̂͊ԈႢ�����Ă������ƁB
�����Ƃ����̂́A��ʂɂ͑S�R�m���Ă��Ȃ����A�l�Ԃ̑���Ɋւ��Ă����̂��Ƃ���B
�m�肽���H
>>135 >>���s���{�b�g�ɂ́A��͂�ܐ悪�K�v���Ǝv���ȁB
���������v���܂��B�l�Ԃ̑��́A�K�v�����獡�̍\���ɂȂ��Ă���킯�ł�����A
�ܐ悾���Ɍ��炸�A���̍����Ə_��́A�\�Ȍ���Č����Ȃ��Ƃ����낤��
�v���܂��B
>>121 �_����12�N�O���炸�`���Ə����������������������Ă��Ă���ł����A�S�N�O��
���[�v�����ˑR���̑O�u�����Ȃ������Ă��܂��āA�t���b�s�[�͎c���Ă����ł����A
�`�����Ⴄ�̂ŁA�}���Ȃ��Ȃ��Ď����������c���ĂȂ���ł���B�ŁA���̓r�f�I��
����Ő������Ă܂��B�Ƃ����Ă��A�������蒼�����������Ă��ł����ǂˁB
����ł���B>>�r�^���͍�p����p�̖@���������Ƃ�����̂Ȃ̂Ł@������Ȃ͕̂�����
���Ƃ��Ȃ�����ǁA���͂������i�͂ɐ��蓾�Ȃ��Ƃ����̂͊ԈႢ�����Ă������ƁB
�����Ƃ����̂́A��ʂɂ͑S�R�m���Ă��Ȃ����A�l�Ԃ̑���Ɋւ��Ă����̂��Ƃ���B
�m�肽���H
>>135 >>���s���{�b�g�ɂ́A��͂�ܐ悪�K�v���Ǝv���ȁB
���������v���܂��B�l�Ԃ̑��́A�K�v�����獡�̍\���ɂȂ��Ă���킯�ł�����A
�ܐ悾���Ɍ��炸�A���̍����Ə_��́A�\�Ȍ���Č����Ȃ��Ƃ����낤��
�v���܂��B
>>121 �_����12�N�O���炸�`���Ə����������������������Ă��Ă���ł����A�S�N�O��
���[�v�����ˑR���̑O�u�����Ȃ������Ă��܂��āA�t���b�s�[�͎c���Ă����ł����A
�`�����Ⴄ�̂ŁA�}���Ȃ��Ȃ��Ď����������c���ĂȂ���ł���B�ŁA���̓r�f�I��
����Ő������Ă܂��B�Ƃ����Ă��A�������蒼�����������Ă��ł����ǂˁB
140 �F���J�����������F04/12/09 16:37:04 ID:pJeuqpOm
��95=101
����A���Ȃ�ʔ����B
��_�����A
�����͂������i�͂ɐ��蓾�Ȃ��Ƃ����̂͊ԈႢ�����Ă������ƁB
���Ă���ɂ��Ĕ��_���Ă�l��
�����͂Əd�͂ɂ���Đ��i�͓͂�������Ă��Ƃ������Ă��Ȃ��ł��傤���H
�d�͂����Ői�ނ��Ĉӌ��̓X�L�[�̗�肮�炢�ł���ȊO�͏d�́{���͂��Ă����Ă邵
�Ƃ���Ζ{���I��95=101 ����̌����Ă邱�ƂƓ����ƍl���Ă�������Ȃ����ȁH
���ƁA�y�l�o����ő��s���s�\�Ɗ��������R������ς�C�ɂȂ�܂��B
����A���Ȃ�ʔ����B
��_�����A
�����͂������i�͂ɐ��蓾�Ȃ��Ƃ����̂͊ԈႢ�����Ă������ƁB
���Ă���ɂ��Ĕ��_���Ă�l��
�����͂Əd�͂ɂ���Đ��i�͓͂�������Ă��Ƃ������Ă��Ȃ��ł��傤���H
�d�͂����Ői�ނ��Ĉӌ��̓X�L�[�̗�肮�炢�ł���ȊO�͏d�́{���͂��Ă����Ă邵
�Ƃ���Ζ{���I��95=101 ����̌����Ă邱�ƂƓ����ƍl���Ă�������Ȃ����ȁH
���ƁA�y�l�o����ő��s���s�\�Ɗ��������R������ς�C�ɂȂ�܂��B
141 �F�ʂ肷���肾�����F04/12/09 18:56:34 ID:dp9X9p8C
>>135
�}�W�Ȃ̂��l�^�Ȃ̂����݂��˂邪�c
�ܐ�Ȃ�10�N�ȏ�O���炢�����̃��{�b�g�ɑ��݂��邵
�G��L���ĕ������{�b�g�����Ă���B
�O�҂ŘI�o�x�������̂͐�c��ISAM�B��҂͘I�o�x�����̖�����(^^;
�Ƃ������G��L���ĕ����̂͒N�����Ă���B���邯�ǁA���̎p����
���َp��������ėp�������������ł͔��������̂Ŏg���ĂȂ����{�b�g
���唼�Ȃ����B
�}�W�Ȃ̂��l�^�Ȃ̂����݂��˂邪�c
�ܐ�Ȃ�10�N�ȏ�O���炢�����̃��{�b�g�ɑ��݂��邵
�G��L���ĕ������{�b�g�����Ă���B
�O�҂ŘI�o�x�������̂͐�c��ISAM�B��҂͘I�o�x�����̖�����(^^;
�Ƃ������G��L���ĕ����̂͒N�����Ă���B���邯�ǁA���̎p����
���َp��������ėp�������������ł͔��������̂Ŏg���ĂȂ����{�b�g
���唼�Ȃ����B
142 �F���J�����������F04/12/09 19:47:52 ID:Yr6wCdZW
>>141 Isamu�ɂܐ悪����̂͒m���Ă邪�A�l�b�g�ŒT���Ă�
�ܐ���g���ĕ��s���Ă��铮��͌�����Ȃ��B
���̏�A����HRP-2P�ł͂ܐ悪�����Ȃ��Ă��܂�����ŁA
��肭�����Ȃ������Ǝv���Ă����A�Ⴄ�̂��H
JSK��H7�ɂ��Ă��A�ܐ���g���ĊK�i���オ���Ă�ʐ^�͂��邪�A
�ܐ���g�������s�̓���͌�����Ȃ��B
���낤���āARobo-one�Q�����{�b�g�łܐ���g�������̂����邪�A
�p�^�[������ł���A�ܐ���g�������s���䂪���_�Ƃ���
�m�����Ă���Ƃ͂����Ȃ��B
�G��L���̂�ZMP�̌v�Z��s�ւ�����Ƃ����̂͒m���Ă邪�A
����Ȃ炻���ZMP�����܂ł��g���ĂȂ��ŁA
���������Ɛl�Ԃ̓���ɋ߂�������@���l�����I�ƌ������������B
�ܐ���g���ĕ��s���Ă��铮��͌�����Ȃ��B
���̏�A����HRP-2P�ł͂ܐ悪�����Ȃ��Ă��܂�����ŁA
��肭�����Ȃ������Ǝv���Ă����A�Ⴄ�̂��H
JSK��H7�ɂ��Ă��A�ܐ���g���ĊK�i���オ���Ă�ʐ^�͂��邪�A
�ܐ���g�������s�̓���͌�����Ȃ��B
���낤���āARobo-one�Q�����{�b�g�łܐ���g�������̂����邪�A
�p�^�[������ł���A�ܐ���g�������s���䂪���_�Ƃ���
�m�����Ă���Ƃ͂����Ȃ��B
�G��L���̂�ZMP�̌v�Z��s�ւ�����Ƃ����̂͒m���Ă邪�A
����Ȃ炻���ZMP�����܂ł��g���ĂȂ��ŁA
���������Ɛl�Ԃ̓���ɋ߂�������@���l�����I�ƌ������������B
143 �F���J�����������F04/12/09 20:31:30 ID:YbhHJtxT
>>140
����A95=101���͏d�͂����͂����ɐ��i�̖͂{���ł͂Ȃ��ƌ����Ă�B
���s�^���ɂ��ăO�O���Ă݂�ƁA�w�ʒu�G�l���M�[�Ɖ^���G�l���M�[�̑��ݕϊ���
�����悭���p�������́x�Ə����Ă�Ƃ��낪�����B���͂��̐}�B
ttp://www.ohmsha.co.jp/robocon/magazine/no034/no34_pdf/34hyumanmotion.pdf
���̐U�q��͂����}������A�Ƃ肠�������͂͐��i�͂̎�v�ȗv�f�łȂ����Ƃ͂킩��Ǝv���B
�ł��A���̐}��������Ǝx���r�̓|���U�q�I�ȉ^���̂��߂ɂ́A����ς�d�͕͂K�v�ł́H
�Ǝv���Ă��܂����A>>138�Łu�Б���O�ɓ��ݏo���v�Ƃ������Ƀ~�\������A
�d�́i�d�S�ړ��j�Ő��i�͂Ă���킯�ł͂Ȃ��A�Ɛ������Ă���B
>>95=101
����ȔF���ŗǂ��H
����A95=101���͏d�͂����͂����ɐ��i�̖͂{���ł͂Ȃ��ƌ����Ă�B
���s�^���ɂ��ăO�O���Ă݂�ƁA�w�ʒu�G�l���M�[�Ɖ^���G�l���M�[�̑��ݕϊ���
�����悭���p�������́x�Ə����Ă�Ƃ��낪�����B���͂��̐}�B
ttp://www.ohmsha.co.jp/robocon/magazine/no034/no34_pdf/34hyumanmotion.pdf
���̐U�q��͂����}������A�Ƃ肠�������͂͐��i�͂̎�v�ȗv�f�łȂ����Ƃ͂킩��Ǝv���B
�ł��A���̐}��������Ǝx���r�̓|���U�q�I�ȉ^���̂��߂ɂ́A����ς�d�͕͂K�v�ł́H
�Ǝv���Ă��܂����A>>138�Łu�Б���O�ɓ��ݏo���v�Ƃ������Ƀ~�\������A
�d�́i�d�S�ړ��j�Ő��i�͂Ă���킯�ł͂Ȃ��A�Ɛ������Ă���B
>>95=101
����ȔF���ŗǂ��H
144 �F104=122�F04/12/09 20:34:01 ID:YbhHJtxT
>>136
�����Ă��܂����悤���ƌ����̂ŁAInternet Archive�Ő��N�O�ɑk���Ă������炸
���Ⴂ���Ǝv������ł����A����Ȑ�������Ȃ���{�ł��Љ�Ă�T�C�g�����邾�낤�ƁA
�u3d biped ���Ԃ�v����Google�Ō��������猩����܂����B
>>137
�����炱�����Ⴂ���Ă܂����B
�u��{�̖_���A�Ԃɉ����J�}���Ă���Ă݂�Ɓv���������̕����킩��₷���ł��ˁB
�Ƃ����̂́A���̂Ђ˂肪�Ⴄ���Ƃ��{�����Ǝv���Ă���ł����A
����͓��������Ⴄ���Ƃɂ��A�����ω��ł����Ȃ��킯�ł��ˁB
����ƁA�e�R�̃��J�j�Y���ޓ̖{�����ĉ��Ȃ�ł��傤���H
>>139 >���[�v�����ˑR���̑O�u�����Ȃ������Ă��܂���
����͎c�O�B
�����Ă��܂����悤���ƌ����̂ŁAInternet Archive�Ő��N�O�ɑk���Ă������炸
���Ⴂ���Ǝv������ł����A����Ȑ�������Ȃ���{�ł��Љ�Ă�T�C�g�����邾�낤�ƁA
�u3d biped ���Ԃ�v����Google�Ō��������猩����܂����B
>>137
�����炱�����Ⴂ���Ă܂����B
�u��{�̖_���A�Ԃɉ����J�}���Ă���Ă݂�Ɓv���������̕����킩��₷���ł��ˁB
�Ƃ����̂́A���̂Ђ˂肪�Ⴄ���Ƃ��{�����Ǝv���Ă���ł����A
����͓��������Ⴄ���Ƃɂ��A�����ω��ł����Ȃ��킯�ł��ˁB
����ƁA�e�R�̃��J�j�Y���ޓ̖{�����ĉ��Ȃ�ł��傤���H
>>139 >���[�v�����ˑR���̑O�u�����Ȃ������Ă��܂���
����͎c�O�B
145 �F�ʂ肷���肾�����F04/12/09 21:44:22 ID:iuOFDB5r
>>142
���ܐ���g�������s���䂪���_�Ƃ��Ċm�����Ă���Ƃ͂����Ȃ��B
�Ñ��搶�̘_���Ŋp�^���ʂ̕⏞�ɗL���ł���Ƃ������_�Ŋm�������Z�p����
�v�����ǂȁB�Â��b���B
isamu�̏ꍇ�͂���ɕ�����L�������s�̎��ɑ���߂Ȃǂ̃X�g���[�N��
�]�T���o��Ƃ������Ƃ��������Ă���B
���G��L���̂�ZMP�̌v�Z��s�ւ�����Ƃ����̂͒m���Ă邪�A
�����Ȃ��Ⴂ���Ă�ȁB�G���L�т������p���͓��َp���Ƃ�����
�t�^���w�������Ȃ��B�����Ȃ����ɉ�������I�Ɍ��߂Ă��܂����Ƃ�
�\�����A����͂��낢��Ɗ댯���Ƃ������Ƃ��B
���ׂĂ̋Z�p�̓����b�g�ƃf�����b�g������B�ܐ�Ȃ�@�\�����G�ɂȂ�Ƃ�
���f�����b�g���ȁB�����b�g�ƃf�����b�g�ɂ����ċZ�p����̑I�������
������Ă����̂��Ǝv���̂����c
���ܐ���g�������s���䂪���_�Ƃ��Ċm�����Ă���Ƃ͂����Ȃ��B
�Ñ��搶�̘_���Ŋp�^���ʂ̕⏞�ɗL���ł���Ƃ������_�Ŋm�������Z�p����
�v�����ǂȁB�Â��b���B
isamu�̏ꍇ�͂���ɕ�����L�������s�̎��ɑ���߂Ȃǂ̃X�g���[�N��
�]�T���o��Ƃ������Ƃ��������Ă���B
���G��L���̂�ZMP�̌v�Z��s�ւ�����Ƃ����̂͒m���Ă邪�A
�����Ȃ��Ⴂ���Ă�ȁB�G���L�т������p���͓��َp���Ƃ�����
�t�^���w�������Ȃ��B�����Ȃ����ɉ�������I�Ɍ��߂Ă��܂����Ƃ�
�\�����A����͂��낢��Ɗ댯���Ƃ������Ƃ��B
���ׂĂ̋Z�p�̓����b�g�ƃf�����b�g������B�ܐ�Ȃ�@�\�����G�ɂȂ�Ƃ�
���f�����b�g���ȁB�����b�g�ƃf�����b�g�ɂ����ċZ�p����̑I�������
������Ă����̂��Ǝv���̂����c
146 �F���J�����������F04/12/09 23:09:18 ID:oJjig5MX
147 �F���J�����������F04/12/10 00:42:42 ID:sVSZsJ5E
>>145
�Ƃ肠���������B�ܐ��L���Ɏg�������s���䂪�m�����Ă��Ȃ��B
�ܐ������Ă������̉����Ƃ��Ďg���āA���܂ł̕��s������s���Ă͈Ӗ��������B
>�����Ȃ��Ⴂ���Ă�ȁB�G���L�т������p���͓��َp���Ƃ�����
ttp://www.moriyama.com/netscience/Kajita_Shuji/Kajita-5.html#14
�m���Ɋ��Ⴂ�͂��Ă邩���ȁA���̕ӂɏ����Ă��������Ƃ�����o���ŏ������̂ŁB
����ƌҊ߂Ƃ̋������ő�ɂȂ����ꍇ�A�G�̈ʒu�͈��������B����=�^�������B
����͂Ƃ������A���ٓ_�̉����@�́A���Ƀ}�j�s�����[�^�ŐF�X�ƍl�����Ă��邵�A
�����܂ł��o���Ȃ��Ƃ����Ă�����O�ɂ͐i�߂Ȃ��B
>�����b�g�ƃf�����b�g�ɂ����ċZ�p����̑I������Ė�����Ă����̂��Ǝv���̂����c
���̒ʂ�B����͐����������ŁA�l�Ԃ��ܐ�B�������̂͂���Ȃ�ɈӖ�������B
�l�Ԃł��ܐ���g��Ȃ��Ă������邱�Ƃ͕����邯�ǁA���������H
�Ԃ����Ⴏ�A�A�V���̕��������匙���Ȃ�ŁAZMP���������������ė~�����Ƃ����̂��{���B
����Ȃ̂��X������Ă����猙�߂���B���s�Ƃ��̌����ɂ́A���Ȃ���҂��Ă������B
�Ƃ肠���������B�ܐ��L���Ɏg�������s���䂪�m�����Ă��Ȃ��B
�ܐ������Ă������̉����Ƃ��Ďg���āA���܂ł̕��s������s���Ă͈Ӗ��������B
>�����Ȃ��Ⴂ���Ă�ȁB�G���L�т������p���͓��َp���Ƃ�����
ttp://www.moriyama.com/netscience/Kajita_Shuji/Kajita-5.html#14
�m���Ɋ��Ⴂ�͂��Ă邩���ȁA���̕ӂɏ����Ă��������Ƃ�����o���ŏ������̂ŁB
����ƌҊ߂Ƃ̋������ő�ɂȂ����ꍇ�A�G�̈ʒu�͈��������B����=�^�������B
����͂Ƃ������A���ٓ_�̉����@�́A���Ƀ}�j�s�����[�^�ŐF�X�ƍl�����Ă��邵�A
�����܂ł��o���Ȃ��Ƃ����Ă�����O�ɂ͐i�߂Ȃ��B
>�����b�g�ƃf�����b�g�ɂ����ċZ�p����̑I������Ė�����Ă����̂��Ǝv���̂����c
���̒ʂ�B����͐����������ŁA�l�Ԃ��ܐ�B�������̂͂���Ȃ�ɈӖ�������B
�l�Ԃł��ܐ���g��Ȃ��Ă������邱�Ƃ͕����邯�ǁA���������H
�Ԃ����Ⴏ�A�A�V���̕��������匙���Ȃ�ŁAZMP���������������ė~�����Ƃ����̂��{���B
����Ȃ̂��X������Ă����猙�߂���B���s�Ƃ��̌����ɂ́A���Ȃ���҂��Ă������B
148 �F���J�����������F04/12/10 12:46:27 ID:3Ggx+16G
����e���r�Ń��{�b�g�������]�����肵�Ă����B
�͂��߂͐l�ԉ��Ǝv�������A����Ȃ��Ƃ͂����ł���ȁB
�Ō�͂Ȃ�����Ă������ǂȁB���������Ȃ��B
�͂��߂͐l�ԉ��Ǝv�������A����Ȃ��Ƃ͂����ł���ȁB
�Ō�͂Ȃ�����Ă������ǂȁB���������Ȃ��B
149 �F���J�����������F04/12/10 13:26:18 ID:ymokB0/T
���r�݁X
150 �F147�F04/12/10 23:22:28 ID:sVSZsJ5E
����ȁA��Ȃ��璴�܂�Ȃ���ʘ_�ɂȂ��Ă��܂����B
�Ƃ����킯�ŁA�ܐ���g�������s�ɂ��ĕ⑫�B�f�l���K���ɍl�������ƂȂ̂ŁA�������������ǁB
���s���{�b�g�̕��s�́A�����̈��͒��S���x���_�Ƃ����A�|���U�q�Ɏ��Ă���Ƃ����Ă�B
�g�̂̏d�S���ς��ƁA���͒��S���ς��̂Ŏx���_�͉����B
�i���͂��̐����������Ă������T�C�g�ɂ������}�A�x���_���ԂɗႦ�Ă���j
ttp://web.archive.org/web/http://www1.linkclub.or.jp/~zhidao/zlab/robot/bipedmodel2.jpg
�l�Ԃ̕��s���̎x���r�̓������A��̃��f�����g���ăC���[�W����Ƃ���Ȋ����ɂȂ�͂����B
�l�Ԃ̕��ʂ̕��s�ł́A�x���r�����ւ�������A�x���_�i��̐}�̎Ԃ̈ʒu�j�����ӂ�ɂ���B
�x���r�ɂ���̏d���|���A�d�S��O�Ɏ����čs���ƁA�x���_���O�Ɉړ����Ă����B
�ł��A���̂܂x���_���O�ɐi�݉߂��������яo���Ă��܂��ƁA���̗��Ŏx���邱�Ƃ��o�����ɓ|���B
�����ŁA��яo���O�ɂܐ�Ŏx���_�Ƀu���[�L���|����B
�x���_�͒�~������A��ɍڂ��Ă�g�́i�U�q�j�́A�����̉e���őO�ɉ����o�����B
���̎��A�}�u���[�L�|�����Ԃ̂悤�Ɏ��R�������オ��ƁB
�i�V�r���l���ɓ���ĂȂ����A�C���[�W�Ȃ�Ŏ��ۂƂ͈Ⴄ���Ƃɒ��Ӂj
�ŁA����ȓ��������{�b�g�ɂ����ė~�����킯�B
���̂��߂ɂ��A�ܐ�����̂悤�ȍ\���͕K�v���Ǝv�����A�x���_=�����̈��͒��S��
���m�ȃR���g���[���Ƃ��܂��ۑ�͂���͂��B
�i���ɍ����xZMP����ɂ��Ę_�����o�Ă��肷����ǂˁj
�ԈႢ�����邾�낤���A�N�ł��v�����悤�Ȃ��ƂȂ̂ŁA���ɕ����o�Ă��Ƃ�
�������Ă�Ƃ�����Ǝv�����A�m���Ă��狳���Ă���B
�Ƃ����킯�ŁA�ܐ���g�������s�ɂ��ĕ⑫�B�f�l���K���ɍl�������ƂȂ̂ŁA�������������ǁB
���s���{�b�g�̕��s�́A�����̈��͒��S���x���_�Ƃ����A�|���U�q�Ɏ��Ă���Ƃ����Ă�B
�g�̂̏d�S���ς��ƁA���͒��S���ς��̂Ŏx���_�͉����B
�i���͂��̐����������Ă������T�C�g�ɂ������}�A�x���_���ԂɗႦ�Ă���j
ttp://web.archive.org/web/http://www1.linkclub.or.jp/~zhidao/zlab/robot/bipedmodel2.jpg
{kind=link}
�l�Ԃ̕��s���̎x���r�̓������A��̃��f�����g���ăC���[�W����Ƃ���Ȋ����ɂȂ�͂����B
�l�Ԃ̕��ʂ̕��s�ł́A�x���r�����ւ�������A�x���_�i��̐}�̎Ԃ̈ʒu�j�����ӂ�ɂ���B
�x���r�ɂ���̏d���|���A�d�S��O�Ɏ����čs���ƁA�x���_���O�Ɉړ����Ă����B
�ł��A���̂܂x���_���O�ɐi�݉߂��������яo���Ă��܂��ƁA���̗��Ŏx���邱�Ƃ��o�����ɓ|���B
�����ŁA��яo���O�ɂܐ�Ŏx���_�Ƀu���[�L���|����B
�x���_�͒�~������A��ɍڂ��Ă�g�́i�U�q�j�́A�����̉e���őO�ɉ����o�����B
���̎��A�}�u���[�L�|�����Ԃ̂悤�Ɏ��R�������オ��ƁB
�i�V�r���l���ɓ���ĂȂ����A�C���[�W�Ȃ�Ŏ��ۂƂ͈Ⴄ���Ƃɒ��Ӂj
�ŁA����ȓ��������{�b�g�ɂ����ė~�����킯�B
���̂��߂ɂ��A�ܐ�����̂悤�ȍ\���͕K�v���Ǝv�����A�x���_=�����̈��͒��S��
���m�ȃR���g���[���Ƃ��܂��ۑ�͂���͂��B
�i���ɍ����xZMP����ɂ��Ę_�����o�Ă��肷����ǂˁj
�ԈႢ�����邾�낤���A�N�ł��v�����悤�Ȃ��ƂȂ̂ŁA���ɕ����o�Ă��Ƃ�
�������Ă�Ƃ�����Ǝv�����A�m���Ă��狳���Ă���B
151 �F���J�����������F04/12/10 23:55:47 ID:sVSZsJ5E
���łɕ��������̂����ǁAZMP��COP�Ɠ����_�Ƃ��Ă���l�ƁA
�ʂ̓_�Ƃ��Ă���l������݂����Ȃ��ǁA�ǂ������������낤�H
���������ڂ��������ƁA��́���2�ʂ�̐����̎d��������l������B
�@�@ZMP�͏����͂̒��S���A�s�b�`���ƃ��[���̃��[�����g��0�ɂȂ�_�ŁA
�@�@ ���ꂪ�����̈��S�̈���ɂ���Γ]�Ȃ�
�@�AZMP��COP�Ɠ����ŁA�i���̓Z���T���ɂ�蓾����j�����̏����͂̒��S�ł���A
�@�@ ������v�Z�Œ�߂��ڕWZMP�Ɠ����ʒu�ɂȂ�悤�ɐ��䂷��Γ]�Ȃ�
�ǂ��������\�܂Ƃ��ȂƂ���ɏ����Ă����ŁA�ǂ������������̂��킩���B
�ʂ̓_�Ƃ��Ă���l������݂����Ȃ��ǁA�ǂ������������낤�H
���������ڂ��������ƁA��́���2�ʂ�̐����̎d��������l������B
�@�@ZMP�͏����͂̒��S���A�s�b�`���ƃ��[���̃��[�����g��0�ɂȂ�_�ŁA
�@�@ ���ꂪ�����̈��S�̈���ɂ���Γ]�Ȃ�
�@�AZMP��COP�Ɠ����ŁA�i���̓Z���T���ɂ�蓾����j�����̏����͂̒��S�ł���A
�@�@ ������v�Z�Œ�߂��ڕWZMP�Ɠ����ʒu�ɂȂ�悤�ɐ��䂷��Γ]�Ȃ�
�ǂ��������\�܂Ƃ��ȂƂ���ɏ����Ă����ŁA�ǂ������������̂��킩���B
152 �F���J�����������F04/12/11 01:56:12 ID:0WiMB89L
>>151
>�@�@ZMP�͏����͂̒��S���A�s�b�`���ƃ��[���̃��[�����g��0�ɂȂ�_�ŁA
>�@�@ ���ꂪ�����̈��S�̈���ɂ���Γ]�Ȃ�
>�@�AZMP��COP�Ɠ����ŁA�i���̓Z���T���ɂ�蓾����j�����̏����͂̒��S�ł���A
>�@�@ ������v�Z�Œ�߂��ڕWZMP�Ɠ����ʒu�ɂȂ�悤�ɐ��䂷��Γ]�Ȃ�
�܂��AZMP��COP�Ƃ̊W�ɂ��āB
1.ZMP�͏����͂̏d�S(���S�ł͂Ȃ�)�ŁA���̓_���̃��[�����g��������(�s�b�`���{���[������萬��)�͕K��0�ɂȂ�(�u���v�ƌ������ꍇ�͂��ꂼ�ꂪ�Ɨ��ȏ����̂悤�ɉ��߂ł��邪�A�����ł͂Ȃ��A���҂͎��͓�������)�B
2.COP�͐����R�͂̌v���l�������狁�܂邪�A���f�����̐����̓��[�����g�ɉe�����Ȃ��̂ŁA���ǂ����ZMP�Ɉ�v����B
���ɓ]�ԓ]�Ȃ��̘b�B
1.�Ⴆ�Ύ������Ћr�������Ă���Ƃ��ɁAZMP����ɑ����ǂ܂�Ȃ��ɂ���悤�ɐ��䂵�Ă݂悤�B�ǂ��Ȃ�H�]�Ԃ���H
2.�u�v�Z�Œ�߂��ڕWZMP�v�̑f���ɂ�邾�낤�B�S�g�����艻�����悤�Ȍ��ߕ�������Ηǂ����A���ߕ�������ڂ��Ƌp���ē]�������ɐ��䂪�����B
�܂�A�ǂ������ԈႢ�B���\�܂Ƃ��ȂƂ�����āA�ǂ���B
>�@�@ZMP�͏����͂̒��S���A�s�b�`���ƃ��[���̃��[�����g��0�ɂȂ�_�ŁA
>�@�@ ���ꂪ�����̈��S�̈���ɂ���Γ]�Ȃ�
>�@�AZMP��COP�Ɠ����ŁA�i���̓Z���T���ɂ�蓾����j�����̏����͂̒��S�ł���A
>�@�@ ������v�Z�Œ�߂��ڕWZMP�Ɠ����ʒu�ɂȂ�悤�ɐ��䂷��Γ]�Ȃ�
�܂��AZMP��COP�Ƃ̊W�ɂ��āB
1.ZMP�͏����͂̏d�S(���S�ł͂Ȃ�)�ŁA���̓_���̃��[�����g��������(�s�b�`���{���[������萬��)�͕K��0�ɂȂ�(�u���v�ƌ������ꍇ�͂��ꂼ�ꂪ�Ɨ��ȏ����̂悤�ɉ��߂ł��邪�A�����ł͂Ȃ��A���҂͎��͓�������)�B
2.COP�͐����R�͂̌v���l�������狁�܂邪�A���f�����̐����̓��[�����g�ɉe�����Ȃ��̂ŁA���ǂ����ZMP�Ɉ�v����B
���ɓ]�ԓ]�Ȃ��̘b�B
1.�Ⴆ�Ύ������Ћr�������Ă���Ƃ��ɁAZMP����ɑ����ǂ܂�Ȃ��ɂ���悤�ɐ��䂵�Ă݂悤�B�ǂ��Ȃ�H�]�Ԃ���H
2.�u�v�Z�Œ�߂��ڕWZMP�v�̑f���ɂ�邾�낤�B�S�g�����艻�����悤�Ȍ��ߕ�������Ηǂ����A���ߕ�������ڂ��Ƌp���ē]�������ɐ��䂪�����B
�܂�A�ǂ������ԈႢ�B���\�܂Ƃ��ȂƂ�����āA�ǂ���B
153 �F���J�����������F04/12/11 03:47:47 ID:lrmXvX9r
>>152
�킩��₷�����肪�Ƃ��B
ZMP�������A�x�����p�`�̊O�ɂ����Ԃ��Ă����̂́A�������ɓ]��ł���Ă��Ƃ��B
>���ɓ]�ԓ]�Ȃ��̘b�B
�������������������A�]�|�����ɕ��s�𑱂�������ĈӖ��ŏ������B
��������Ă悤�ł��܂Ȃ������B
���Ԃ̊��Ⴂ�Ȃ̂ŁA�N���͂�߂Ƃ��B
�킩��₷�����肪�Ƃ��B
ZMP�������A�x�����p�`�̊O�ɂ����Ԃ��Ă����̂́A�������ɓ]��ł���Ă��Ƃ��B
>���ɓ]�ԓ]�Ȃ��̘b�B
�������������������A�]�|�����ɕ��s�𑱂�������ĈӖ��ŏ������B
��������Ă悤�ł��܂Ȃ������B
���Ԃ̊��Ⴂ�Ȃ̂ŁA�N���͂�߂Ƃ��B
154 �F���J�����������F04/12/11 09:36:52 ID:NPVCA/0a
>>ZMP�������A�x�����p�`�̊O�ɂ����Ԃ��Ă����̂́A�������ɓ]��ł���Ă��Ƃ��B
�����������ƈႤ�BZMP�͐�Ɏx�����p�`�̊O�ɂ͏o�Ȃ��B
ZMP���x�����p�`�̊O�ɂ���Ƃ����̂́A�������n�ʂ�����������Ă���Ƃ���
�����I�ɂ��蓾�Ȃ���Ԃ��Ӗ����Ă��邩��B
�܂��AZMP���x�����p�`�̉��ɂ���Ɠ]�ԂƂ������������Ă���l�����邪�A�����
�ԈႢ�B�ܐ旧��������K���]�Ԃ��Ă킯�ł͂Ȃ��ł���B
ZMP�����ł́A�]�Ԃ��ǂ����̔���͂ł��Ȃ���B
�Ƃ������A�]�Ƃ����̂́A���ɋN�������ߋ��̉^���ɑ��ď��߂Ă����]���ł���
���Ƃł����āA�܂��������Ă��Ȃ��^���́A����������u�Ԃ��������āA�]��ł���
�Ƃ��������̓G�X�p�[�ł��Ȃ���ł��Ȃ��B
������Ɛ̂̂͂��ŁA�܂��Ă��Ƃ���(�����Ă���悤�Ɍ�����)�O��������ċt���͊w
�V�~�����[�^�ɋ�킹�AZMP���x�����p�`�̊O�ɏo����(�t���͊w�́A�����I�ɂ��蓾
�Ȃ��^���������ƌv�Z���Ă���邩���)���̋O���͖v�A�o�Ȃ��Ȃ�܂Ŏ��s����I��
��蒼���A�����I�ɂ��蓾��O���ɂ���A�Ƃ������@���������B
���ꂪ�������ē`����āAZMP���x�����p�`�̊O�ɏo���炱����A�Ƃ�������������
�l�������Ă��܂�����Ȃ����ȁB
�����������ƈႤ�BZMP�͐�Ɏx�����p�`�̊O�ɂ͏o�Ȃ��B
ZMP���x�����p�`�̊O�ɂ���Ƃ����̂́A�������n�ʂ�����������Ă���Ƃ���
�����I�ɂ��蓾�Ȃ���Ԃ��Ӗ����Ă��邩��B
�܂��AZMP���x�����p�`�̉��ɂ���Ɠ]�ԂƂ������������Ă���l�����邪�A�����
�ԈႢ�B�ܐ旧��������K���]�Ԃ��Ă킯�ł͂Ȃ��ł���B
ZMP�����ł́A�]�Ԃ��ǂ����̔���͂ł��Ȃ���B
�Ƃ������A�]�Ƃ����̂́A���ɋN�������ߋ��̉^���ɑ��ď��߂Ă����]���ł���
���Ƃł����āA�܂��������Ă��Ȃ��^���́A����������u�Ԃ��������āA�]��ł���
�Ƃ��������̓G�X�p�[�ł��Ȃ���ł��Ȃ��B
������Ɛ̂̂͂��ŁA�܂��Ă��Ƃ���(�����Ă���悤�Ɍ�����)�O��������ċt���͊w
�V�~�����[�^�ɋ�킹�AZMP���x�����p�`�̊O�ɏo����(�t���͊w�́A�����I�ɂ��蓾
�Ȃ��^���������ƌv�Z���Ă���邩���)���̋O���͖v�A�o�Ȃ��Ȃ�܂Ŏ��s����I��
��蒼���A�����I�ɂ��蓾��O���ɂ���A�Ƃ������@���������B
���ꂪ�������ē`����āAZMP���x�����p�`�̊O�ɏo���炱����A�Ƃ�������������
�l�������Ă��܂�����Ȃ����ȁB
155 �F���J�����������F04/12/11 14:19:07 ID:mbY6xmk1
�_���Ȃ莮�����p���Ęb���Ό�����Ȃ����̂�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�n������
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�n������
156 �F���J�����������F04/12/11 18:59:41 ID:lrmXvX9r
>>154
�Ȃ�قǁB���肪�Ƃ��A�������肵���B
ZMP=COP���Ƃ���ƁAZMP����Ɏx�����p�`�̒��ɂ���͓̂�����O�B
�ł��A��������Ƃ悭����uZMP���x�����p�`���ɂ���Έ��肵�ĕ��s�ł���v
���Ă��������͂��������C�����āA�ǂ����[���ł��Ȃ��ł����B
��҂̐��������m�ł͂Ȃ������̂��B
>>155
�킩��₷���_�����������낵���B�ł��A���͌��Ă��킩����B
�Ȃ�قǁB���肪�Ƃ��A�������肵���B
ZMP=COP���Ƃ���ƁAZMP����Ɏx�����p�`�̒��ɂ���͓̂�����O�B
�ł��A��������Ƃ悭����uZMP���x�����p�`���ɂ���Έ��肵�ĕ��s�ł���v
���Ă��������͂��������C�����āA�ǂ����[���ł��Ȃ��ł����B
��҂̐��������m�ł͂Ȃ������̂��B
>>155
�킩��₷���_�����������낵���B�ł��A���͌��Ă��킩����B
157 �F���J�����������F04/12/11 19:13:06 ID:lrmXvX9r
�Ƃ���ŁA>>95=101����́A���������Ă܂��u���JPROXY�K���v�ɂ������Ă�̂��ȁH
�Œ�IP�A�h���X�łȂ��Ȃ�A��x�v���o�C�_�Ƃ̉����ؒf���A
�����u���Đڑ��������Ƃ��������m��Ȃ��B
�Œ�̏ꍇ�́A���̕Ӂ�ttp://dempa.2ch.net/prj/page/bbq/index2.html�������A
�Ȃ�Ƃ����邵���B
�Œ�IP�A�h���X�łȂ��Ȃ�A��x�v���o�C�_�Ƃ̉����ؒf���A
�����u���Đڑ��������Ƃ��������m��Ȃ��B
�Œ�̏ꍇ�́A���̕Ӂ�ttp://dempa.2ch.net/prj/page/bbq/index2.html�������A
�Ȃ�Ƃ����邵���B
158 �F���J�����������F04/12/11 21:14:00 ID:mbY6xmk1
���w�̒m�����Ȃ��҂����[�����[�������Ă������ł��Ȃ����낗
159 �F���J�����������F04/12/11 23:47:47 ID:QhYEe02C
95�̂ЂƂ͈�xmomentum control�ł������Ă݂�Ƃ����Ƃ�����
���s���{�b�g�Ɋւ���p�^���ʐ���̂��̂��̃Y�o���Ș_�������낢��o�Ă��͂�
ISAMU�ɂ������ܐ悪HRP-2�ɂȂ��̂͒P��
�u�ܐ�͂���������ŕ֗������ǕK�{����Ȃ��v���炾�ƕ��������Ƃ�����
���ۂܐ�߂Ȃ��Ă��ܐ�R��̕��s�͂ł���킯�����B
���s���{�b�g�Ɋւ���p�^���ʐ���̂��̂��̃Y�o���Ș_�������낢��o�Ă��͂�
ISAMU�ɂ������ܐ悪HRP-2�ɂȂ��̂͒P��
�u�ܐ�͂���������ŕ֗������ǕK�{����Ȃ��v���炾�ƕ��������Ƃ�����
���ۂܐ�߂Ȃ��Ă��ܐ�R��̕��s�͂ł���킯�����B
160 �F���J�����������F04/12/12 03:03:55 ID:95mV+6QQ
>>159
>�u�ܐ�͂���������ŕ֗������ǕK�{����Ȃ��v���炾�ƕ��������Ƃ�����
�m���ɁAH7���ɂ����u�q���[�}�m�C�h���{�b�g�̃{�f�B�f�U�C���v�Ȃ�ǂނƁA
�u�����i�z���_�̐l�̘_���j �ɂ��C�l�Ԍ^���{�b�g�̕��s����ɂ����Ăܐ掩�R�x�͕K�v�Ȃ��v
�Ƃ������Ă��邩��Ȃ��B�z���_�̐l�̘_���͉p�������A������9P�Ń_�E�����[�h��$35���|����̂œǂ�łȂ����ǁB
>���ۂܐ�߂Ȃ��Ă��ܐ�R��̕��s�͂ł���킯�����B
�V�r�����n������ɂܐ旧���ɂȂ���s�́A�ܐ悪�����Ă��o���邯��ǁA
�ܐ悾���Ŏx������Ԃ�������s�͖����Ȃ̂ŁA�l�Ԃɋ߂����s������ɂ͂���ς�K�v�B
ttp://www.kawalab.dnj.ynu.ac.jp/~taro/kawalab/research/biped_walking/index.html
�������ɁA�ܐ���g�������s�̔�r�������Ă����Ėʔ����B
�ܐ悾���Ŏx���Ă鎞�́A�����œ����đς���悤�Ȃ��Ƃ��o���Ȃ��̂���ς炵���B
>�u�ܐ�͂���������ŕ֗������ǕK�{����Ȃ��v���炾�ƕ��������Ƃ�����
�m���ɁAH7���ɂ����u�q���[�}�m�C�h���{�b�g�̃{�f�B�f�U�C���v�Ȃ�ǂނƁA
�u�����i�z���_�̐l�̘_���j �ɂ��C�l�Ԍ^���{�b�g�̕��s����ɂ����Ăܐ掩�R�x�͕K�v�Ȃ��v
�Ƃ������Ă��邩��Ȃ��B�z���_�̐l�̘_���͉p�������A������9P�Ń_�E�����[�h��$35���|����̂œǂ�łȂ����ǁB
>���ۂܐ�߂Ȃ��Ă��ܐ�R��̕��s�͂ł���킯�����B
�V�r�����n������ɂܐ旧���ɂȂ���s�́A�ܐ悪�����Ă��o���邯��ǁA
�ܐ悾���Ŏx������Ԃ�������s�͖����Ȃ̂ŁA�l�Ԃɋ߂����s������ɂ͂���ς�K�v�B
ttp://www.kawalab.dnj.ynu.ac.jp/~taro/kawalab/research/biped_walking/index.html
�������ɁA�ܐ���g�������s�̔�r�������Ă����Ėʔ����B
�ܐ悾���Ŏx���Ă鎞�́A�����œ����đς���悤�Ȃ��Ƃ��o���Ȃ��̂���ς炵���B
161 �F���J�����������F04/12/12 07:47:26 ID:G3R/XGa3
95�̕��͗���̐l�̂͂�����ȁH�@�{���̐l�Ԃ̓������悭�m���Ă���l�̘b�Ȃ���A
�ʔ�����B���w��烍�{�b�g�H�w�̂��Ƃ͒m��Ȃ������������Ă�����������Ȃ��B
�����̌����_�����K�������������Ƃ͌�����Ȃ����A����Ȃ��̂ɂƂ���Ȃ��Ŏ��R��
����Ă��炤���������Ǝv����B
�ʔ�����B���w��烍�{�b�g�H�w�̂��Ƃ͒m��Ȃ������������Ă�����������Ȃ��B
�����̌����_�����K�������������Ƃ͌�����Ȃ����A����Ȃ��̂ɂƂ���Ȃ��Ŏ��R��
����Ă��炤���������Ǝv����B
162 �F���J�����������F04/12/12 13:58:35 ID:4JfaMdPt
>>161
����͂����Ȃ��ǁA>>95����͋t�ɗ͊w���Ȃ�������ɂ��Ă�悤�Ȉ�ۂ���Ȃ��B
���͂Ȃ��ɐ��i�͂����o����Ȃ�āA�͊w�@�����炷��Ζ��炩�ɂ����������B
�萫�I�v�l�ƒ�ʓI�v�l�A�����ɂ͂ǂ��������B
����͂����Ȃ��ǁA>>95����͋t�ɗ͊w���Ȃ�������ɂ��Ă�悤�Ȉ�ۂ���Ȃ��B
���͂Ȃ��ɐ��i�͂����o����Ȃ�āA�͊w�@�����炷��Ζ��炩�ɂ����������B
�萫�I�v�l�ƒ�ʓI�v�l�A�����ɂ͂ǂ��������B
163 �F���J�����������F04/12/12 17:10:32 ID:wKhlUaG1
>>162
95����̘b�́A�͊w�I�Șb�Ƃ������^���̕߂炦���Ƃ�����������Ȃ����ȁB
���͂͐����邪�A������e�R�Ō����Ύx�_�Ƃ��邩��p�_�Ƃ��邩�ŁA
�����͕ς���Ă���Ƃ����悤�ȁB
���Ƃ��AMIT�̃z�b�s���O���{�b�g�͖��炩�ɔ��͂̏d�S����p�_�ɂ��āA
�����͂Đ��i���s���Ă��邯�ǁA�l�Ԍ^2�����s���{�b�g�̓|���U�q���f���ł́A
��̂�͓_�A������p�_�ƍl����A���͂̏d�S�͎x�_�ƍl���邱�Ƃ��o����Ƃ��������ŁB
95����̘b�́A�͊w�I�Șb�Ƃ������^���̕߂炦���Ƃ�����������Ȃ����ȁB
���͂͐����邪�A������e�R�Ō����Ύx�_�Ƃ��邩��p�_�Ƃ��邩�ŁA
�����͕ς���Ă���Ƃ����悤�ȁB
���Ƃ��AMIT�̃z�b�s���O���{�b�g�͖��炩�ɔ��͂̏d�S����p�_�ɂ��āA
�����͂Đ��i���s���Ă��邯�ǁA�l�Ԍ^2�����s���{�b�g�̓|���U�q���f���ł́A
��̂�͓_�A������p�_�ƍl����A���͂̏d�S�͎x�_�ƍl���邱�Ƃ��o����Ƃ��������ŁB
164 �F���J�����������F04/12/12 22:11:03 ID:VhYU7+eK
����H���͂̏d�S���Ă̂́H�@����ɂ������p�_�ɂ���H�@���������Ă�H
165 �F���J�����������F04/12/14 23:33:10 ID:yVqLer35
166 �F95=101�F04/12/15 00:37:13 ID:0kCxEyLU
�x���Ȃ�܂����B
����̓i���g�J�K���ɂЂ����������̂łȂ��A�o���ŗ���ɂ��Ă���܂����B(�Ђ����������̂�
�V�[�g�x���g�̎����܂肾�����B�N�\��)
>>162���͂Ȃ��ɐ��i�͂����o����Ȃ�āA�͊w�@�����炷��Ζ��炩�ɂ�������
�j���[�g���͊w�̗͊w�@���Ƃ����̂́A�`�̕ς�Ȃ��A�d�S�̈ʒu���ς�Ȃ��ő̂ł̘b�ŁA�l�̂́A
������Ǝ葫��������A�p����ς����肷��ƁA�S�̂̏d�S�̈ʒu�͕ω����܂�����A�u�j���[
�g���͊w�v�ł́A�l�̂�{�b�g�̂悤�ȁA���ʂ������̘̂A���̂ɋN���錻�ہA���Ɏ��͂ŕ����A
����Ƃ��������ɂ͂��܂肠�Ă͂܂�Ȃ���ł���B�ŁA�A���̂��Q�{�̋r�������Ă���Ƃ������Ƃ�
�N���錻�ۂ̈�ɁA�u���z�e�R�̌`���v�������ł���B
�u���͂Ȃ��ɐ��i�͂����o����v�Ƃ����̂́A�������Ƃ��Ă̓n�Y���ŁA�u�l�Ԃ́A���鎞�ɂ́A
�n�ʔ��͂����i�͂ɂȂ��Ă���̂ł͂Ȃ��A���ɐ����ɔ�������͂����i�͂ɂȂ��Ă���B��������
�I��قǂ��̗͂͋����A�����������Ă���B�v�Ƃ����������ɂȂ�܂��B
���s���u���R�ȃC�C�����v�Ȃ̂́A���͂Ő��i���悤�Ƒ��Œn�ʂ��R�l�Ă���̂ł͂Ȃ��A�d��
�Ȃǂ�[�O��]�ň��������đ������Ă����Ă��邩��ŁA���͂قƂ�Ǒ̏d���x���邾���ɂȂ���
�����ł����A���z�e�R�͂�������[�O��]�̂悤�ɁA���ɐ��i�͂��قڐ����ɔ����������ł���B
�u�܂�Ŏ����s�v�Ƃ����̂��u���z�e�R�v�łł���悤�ɂȂ�킯�ł����A�����ܐ�̂��Ƃɂ�
�G��Ă���̂́A�ܐ悪��ɋȂ��邱�ƂɈӖ�������Ƃ������ƂȂ�ł��B�ܐ�́A�܂����łȂ�
�Ƃ�����������������ɂ́A�n�ʂ����ނ悤�ɂ��Ĉ��肳����悤�Ȗ����������ł����A����
�������葖�����肷�鎞�ɂ́A�n�ʂ��ǂ���������Ƃ������������A�������ւ����Ēn�ʂ𗣂�鎞�ɁA
�����]�v�Ȓn�ʔ��͂��ăn�l�Ԃ���Ă��܂��ĕs����ɂȂ�Ȃ��悤�ɁA�s�v�Ȓn�ʔ��͂����X������
�̂������ɂȂ�܂��B
�����͂܂����ȋK���Ɉ���������Ȃ��悤�ɁA���Ԃ��ă{�`�{�`�����悤�ɂ��܂��B
����̓i���g�J�K���ɂЂ����������̂łȂ��A�o���ŗ���ɂ��Ă���܂����B(�Ђ����������̂�
�V�[�g�x���g�̎����܂肾�����B�N�\��)
>>162���͂Ȃ��ɐ��i�͂����o����Ȃ�āA�͊w�@�����炷��Ζ��炩�ɂ�������
�j���[�g���͊w�̗͊w�@���Ƃ����̂́A�`�̕ς�Ȃ��A�d�S�̈ʒu���ς�Ȃ��ő̂ł̘b�ŁA�l�̂́A
������Ǝ葫��������A�p����ς����肷��ƁA�S�̂̏d�S�̈ʒu�͕ω����܂�����A�u�j���[
�g���͊w�v�ł́A�l�̂�{�b�g�̂悤�ȁA���ʂ������̘̂A���̂ɋN���錻�ہA���Ɏ��͂ŕ����A
����Ƃ��������ɂ͂��܂肠�Ă͂܂�Ȃ���ł���B�ŁA�A���̂��Q�{�̋r�������Ă���Ƃ������Ƃ�
�N���錻�ۂ̈�ɁA�u���z�e�R�̌`���v�������ł���B
�u���͂Ȃ��ɐ��i�͂����o����v�Ƃ����̂́A�������Ƃ��Ă̓n�Y���ŁA�u�l�Ԃ́A���鎞�ɂ́A
�n�ʔ��͂����i�͂ɂȂ��Ă���̂ł͂Ȃ��A���ɐ����ɔ�������͂����i�͂ɂȂ��Ă���B��������
�I��قǂ��̗͂͋����A�����������Ă���B�v�Ƃ����������ɂȂ�܂��B
���s���u���R�ȃC�C�����v�Ȃ̂́A���͂Ő��i���悤�Ƒ��Œn�ʂ��R�l�Ă���̂ł͂Ȃ��A�d��
�Ȃǂ�[�O��]�ň��������đ������Ă����Ă��邩��ŁA���͂قƂ�Ǒ̏d���x���邾���ɂȂ���
�����ł����A���z�e�R�͂�������[�O��]�̂悤�ɁA���ɐ��i�͂��قڐ����ɔ����������ł���B
�u�܂�Ŏ����s�v�Ƃ����̂��u���z�e�R�v�łł���悤�ɂȂ�킯�ł����A�����ܐ�̂��Ƃɂ�
�G��Ă���̂́A�ܐ悪��ɋȂ��邱�ƂɈӖ�������Ƃ������ƂȂ�ł��B�ܐ�́A�܂����łȂ�
�Ƃ�����������������ɂ́A�n�ʂ����ނ悤�ɂ��Ĉ��肳����悤�Ȗ����������ł����A����
�������葖�����肷�鎞�ɂ́A�n�ʂ��ǂ���������Ƃ������������A�������ւ����Ēn�ʂ𗣂�鎞�ɁA
�����]�v�Ȓn�ʔ��͂��ăn�l�Ԃ���Ă��܂��ĕs����ɂȂ�Ȃ��悤�ɁA�s�v�Ȓn�ʔ��͂����X������
�̂������ɂȂ�܂��B
�����͂܂����ȋK���Ɉ���������Ȃ��悤�ɁA���Ԃ��ă{�`�{�`�����悤�ɂ��܂��B
167 �F���J�����������F04/12/15 00:58:40 ID:TMy0h64a
>>163
��� o <- �͓_ = �͂�������_
|
|
�� o <- ��p�_ = �쓮�����_
/
/
�� /
--o-<------ �x�_ = �Ă��̉�]���S
ZMP=COP
�����������Ƃ��ȁB
����n�ʂɌŒ肵��̂̊e�߂ŗ͂����邱�ƂŁA����O��(���
�ł����ł���������)�i�߂�A�ƁB�m���ɂ������������͂ł���ˁB
�����A�������������������Ƃ��Ă��A��̂Ŕ��������͂͌��ǁA�x�_�ɓ���
���͂Ƃ��đS���Ԃ��Ă��āA���ꂪ�Ȃ��Ƃ���ς蓮�����Ƃ͂ł��Ȃ��͂��B
�F����Ԃ▀�C�̑S���Ȃ����ł́A�������̂������������Ă��O�ɐi��
���Ƃ͂ł��Ȃ��B�^���ʂ��ۑ�����邩��B(���Ȃ݂ɉF����Ԃł͊p�^����
���ۑ�����邪�A�s�v�c�Ȃ��Ƃɉ�邱�Ƃ͂ł���B)
�܂�A��̂��ǂ������������A����Ƃ荇���悤�ɔ������锽�͂��^��
�����߂�킯���B��ǓI�ɂ́B>>116�������Ă�̂́A�����������Ƃ���
�Ȃ��́B
�����A�H�w���Ȃ�ŁA>>95����̈ӌ�����>>116����̎w�E�̕����A����
�{��������C������B
��� o <- �͓_ = �͂�������_
|
|
�� o <- ��p�_ = �쓮�����_
/
/
�� /
--o-<------ �x�_ = �Ă��̉�]���S
ZMP=COP
�����������Ƃ��ȁB
����n�ʂɌŒ肵��̂̊e�߂ŗ͂����邱�ƂŁA����O��(���
�ł����ł���������)�i�߂�A�ƁB�m���ɂ������������͂ł���ˁB
�����A�������������������Ƃ��Ă��A��̂Ŕ��������͂͌��ǁA�x�_�ɓ���
���͂Ƃ��đS���Ԃ��Ă��āA���ꂪ�Ȃ��Ƃ���ς蓮�����Ƃ͂ł��Ȃ��͂��B
�F����Ԃ▀�C�̑S���Ȃ����ł́A�������̂������������Ă��O�ɐi��
���Ƃ͂ł��Ȃ��B�^���ʂ��ۑ�����邩��B(���Ȃ݂ɉF����Ԃł͊p�^����
���ۑ�����邪�A�s�v�c�Ȃ��Ƃɉ�邱�Ƃ͂ł���B)
�܂�A��̂��ǂ������������A����Ƃ荇���悤�ɔ������锽�͂��^��
�����߂�킯���B��ǓI�ɂ́B>>116�������Ă�̂́A�����������Ƃ���
�Ȃ��́B
�����A�H�w���Ȃ�ŁA>>95����̈ӌ�����>>116����̎w�E�̕����A����
�{��������C������B
>>95=166
�����ƁA����Ⴂ�B
> �j���[�g���͊w�̗͊w�@���Ƃ����̂́A�`�̕ς�Ȃ��A�d�S�̈ʒu���ς�Ȃ��ő̂ł̘b�ŁA�l�̂́A
���Ƃ��Ƃ̃j���[�g���̕������͎��_�̉^�����Ώۂ��������ǁA���̌�A
���̌n�ł��j���[�g���͊w�͂����Ɠ��Ă͂܂�Ƃ������Ƃ��������Ă�
��B���̕ӂ�͉������ǂ��Ǐ������A�K���ȗ͊w�̋��ȏ�(��w1�`2�N��
�Ώے��x�̂�ł���)��ǂ����B
�ŁA���̎����܂��āA���s���{�b�g�̐��䗝�_���W�J����Ă���
�킯���B���̃X���̂���ł���u�����v���A����ς肻�̐�ɂȂ���B
�X�|�[�c�Ȋw�̗��ꂩ��萫�I�ȉ��߂������Ă����̂͋����[�����A��
�ɂ������ǁA��������������ςȈӒn�͂炸�ɂ����������Ƃ���
���������A�����͂������Ǝv����B
�����ƁA����Ⴂ�B
> �j���[�g���͊w�̗͊w�@���Ƃ����̂́A�`�̕ς�Ȃ��A�d�S�̈ʒu���ς�Ȃ��ő̂ł̘b�ŁA�l�̂́A
���Ƃ��Ƃ̃j���[�g���̕������͎��_�̉^�����Ώۂ��������ǁA���̌�A
���̌n�ł��j���[�g���͊w�͂����Ɠ��Ă͂܂�Ƃ������Ƃ��������Ă�
��B���̕ӂ�͉������ǂ��Ǐ������A�K���ȗ͊w�̋��ȏ�(��w1�`2�N��
�Ώے��x�̂�ł���)��ǂ����B
�ŁA���̎����܂��āA���s���{�b�g�̐��䗝�_���W�J����Ă���
�킯���B���̃X���̂���ł���u�����v���A����ς肻�̐�ɂȂ���B
�X�|�[�c�Ȋw�̗��ꂩ��萫�I�ȉ��߂������Ă����̂͋����[�����A��
�ɂ������ǁA��������������ςȈӒn�͂炸�ɂ����������Ƃ���
���������A�����͂������Ǝv����B
169 �F95=101�F04/12/15 01:59:24 ID:0kCxEyLU
������ƁB�����������ł��ˁB���X���肪�Ƃ��B167�����168�̃j���[�g���͊w�̘b�́A
�����܂Łu�O�́v�ɂ���Ă̂ݓ���[��]�ł̂��Ƃł���ˁB���̌������z�e�R�́A�A����
���̂��̂́A��������[��]�ɂ͂���܂����A167�ɏ����Ă��ꂽ�@���o<-�͓_�������
�Ⴂ�܂��B�͓_�͂�������̋r�ł��B�O�͂ł͂Ȃ��A���͂ŋr���������ɁA�C�J�T�}
�݂����ȍ�}�Ńe�R���ł����ł���B�ڒn���������x�_�ō����ŏI�I�ɍ�p�_�ɂȂ��
�����̂͂��̒ʂ�ł��B
�����܂Łu�O�́v�ɂ���Ă̂ݓ���[��]�ł̂��Ƃł���ˁB���̌������z�e�R�́A�A����
���̂��̂́A��������[��]�ɂ͂���܂����A167�ɏ����Ă��ꂽ�@���o<-�͓_�������
�Ⴂ�܂��B�͓_�͂�������̋r�ł��B�O�͂ł͂Ȃ��A���͂ŋr���������ɁA�C�J�T�}
�݂����ȍ�}�Ńe�R���ł����ł���B�ڒn���������x�_�ō����ŏI�I�ɍ�p�_�ɂȂ��
�����̂͂��̒ʂ�ł��B
170 �F���J�����������F04/12/15 17:09:55 ID:dqy76A/Y
���s�\�Ȏ�����ASIMO�����\���ꂽ�B
�Ƃ������ƂŁA����܂Ŕ��\���ꂽ���{�b�g�Ƒ��s���\���r���Ă݂��B
���s���x�ł�ASIMO��������[�h���H
�t���[�h�� F=���ϑ��x/��i�r�����d�͉����x�j
�@������ASIMO(Honda) �FF=0.34 ��1(�g��130cm�A��0.05s�A���ϑ��x0.83m/s)
�@HRP-2LR(�Y����)�@�@ �FF=0.07 ��2(�g��127cm�A��0.06s�A���ϑ��x0.16m/s)
�@QRIO(Sony)�@�@�@�@�@�@ �FF=0.17 ��2(�g��58cm�A��0.02s�A���ϑ��x0.23m/s)
-----------------------------------------------------------------
�@��1 �r���͎ʐ^��苁�߂������悻�̐��l���g�����A��2 �Y�����������
�u�t���[�h���v�F���{�b�g�̃T�C�Y�ɂ��Ȃ����s���x�̖ڈ��B
�l�Ԃ̏ꍇ�AF=1�ȉ��ł͕��s�����s���ł��邪�AF=1�ȏ�ł͑��s���邵���Ȃ��B
ttp://www.honda.co.jp/news/2004/c041215-asimo.html
ttp://www.aist.go.jp/aist_j/press_release/pr2004/pr20040415_2/pr20040415_2.html
�Ƃ������ƂŁA����܂Ŕ��\���ꂽ���{�b�g�Ƒ��s���\���r���Ă݂��B
���s���x�ł�ASIMO��������[�h���H
�t���[�h�� F=���ϑ��x/��i�r�����d�͉����x�j
�@������ASIMO(Honda) �FF=0.34 ��1(�g��130cm�A��0.05s�A���ϑ��x0.83m/s)
�@HRP-2LR(�Y����)�@�@ �FF=0.07 ��2(�g��127cm�A��0.06s�A���ϑ��x0.16m/s)
�@QRIO(Sony)�@�@�@�@�@�@ �FF=0.17 ��2(�g��58cm�A��0.02s�A���ϑ��x0.23m/s)
-----------------------------------------------------------------
�@��1 �r���͎ʐ^��苁�߂������悻�̐��l���g�����A��2 �Y�����������
�u�t���[�h���v�F���{�b�g�̃T�C�Y�ɂ��Ȃ����s���x�̖ڈ��B
�l�Ԃ̏ꍇ�AF=1�ȉ��ł͕��s�����s���ł��邪�AF=1�ȏ�ł͑��s���邵���Ȃ��B
ttp://www.honda.co.jp/news/2004/c041215-asimo.html
ttp://www.aist.go.jp/aist_j/press_release/pr2004/pr20040415_2/pr20040415_2.html
171 �F���J�����������F04/12/15 23:35:03 ID:iWutJCVv
�����RKm/h��
172 �F���J�����������F04/12/16 00:28:37 ID:Myf/dCQ+
�q�g�̕����̂��x���Ă��u�������v���B�l�h�s�̕�������ۂǑ����Ă銴���͂���ȁB
�X�T����A�ǂ���H
�X�T����A�ǂ���H
173 �F���J�����������F04/12/16 00:51:45 ID:zgpEhte9
���p���ɂ������đ���ƕ����̗������o���Ȃ��ƑʖڂȂ��Ƃ��炢�킩�邾��H
174 �F���J�����������F04/12/16 01:09:00 ID:xxif/0OQ
���̃X���͉����b�����[�v��������H
175 �F���J�����������F04/12/16 01:18:08 ID:VjypVC+J
>>95=166
�o���ł������A�����l�ł����B
>>101�́u�l�Ԃ̂悤�ɕ����āA����郍�{�b�g�̎����͂܂��܂����̂��Ă���Ƃ��������Ȃ��v
�̗��R���C�ɂȂ��Ă���̂ŁA�]�T�̂���Ƃ��ɂł����肢���܂��B
�Q�l�F������ASIMO�i�����N��ɓ��悠��j
ttp://www.honda.co.jp/HDTV/ASIMO/200412-run/
ttp://news.tbs.co.jp/headline/tbs_headline1093884.html
>>69�̎Y�����̕��Ƃ��܂�ς��Ȃ����ǁA�㔼�g�̃��[�����g�⏞��
�t���Ă��镪�A�Y�����̂��͐l�Ԃ炵�������ɂȂ��Ă�悤�Ɍ�����B
�o���ł������A�����l�ł����B
>>101�́u�l�Ԃ̂悤�ɕ����āA����郍�{�b�g�̎����͂܂��܂����̂��Ă���Ƃ��������Ȃ��v
�̗��R���C�ɂȂ��Ă���̂ŁA�]�T�̂���Ƃ��ɂł����肢���܂��B
�Q�l�F������ASIMO�i�����N��ɓ��悠��j
ttp://www.honda.co.jp/HDTV/ASIMO/200412-run/
ttp://news.tbs.co.jp/headline/tbs_headline1093884.html
>>69�̎Y�����̕��Ƃ��܂�ς��Ȃ����ǁA�㔼�g�̃��[�����g�⏞��
�t���Ă��镪�A�Y�����̂��͐l�Ԃ炵�������ɂȂ��Ă�悤�Ɍ�����B
176 �F���J�����������F04/12/16 01:32:27 ID:VjypVC+J
177 �F���J�����������F04/12/16 01:46:41 ID:I6J/p8yk
176�͉����������Ƃ��Ă��ȁH�@�`�r�h�l�n�͊m���ɐl�Ԃ炵�������Ɍ�����ȁB
�N���Ɏ��Ă���悤�ȋC�����Ă����ǁA�v���o�����B�Ƃ̋ߏ��̐쌴���W���M���O���Ă�
�W�O���������̂��k����̑��肪����Ȋ����������B
�N���Ɏ��Ă���悤�ȋC�����Ă����ǁA�v���o�����B�Ƃ̋ߏ��̐쌴���W���M���O���Ă�
�W�O���������̂��k����̑��肪����Ȋ����������B
178 �F���J�����������F04/12/16 02:01:15 ID:xxif/0OQ
�K�`�K�`�̍����x�n�C�Q�C�����̂�
�o�l�����łق��Ƃ��Ă����˂Ă�悤�ȑ㕨��
����ɔ�r����̂͂ǂ�����
�o�l�����łق��Ƃ��Ă����˂Ă�悤�ȑ㕨��
����ɔ�r����̂͂ǂ�����
179 �F���J�����������F04/12/16 02:24:00 ID:VjypVC+J
>>177
�ߋ����X��ǂ߂ƌ����������������Ȃ��B
�u�������v���ǂ����̒�`�ɂ��Ă�>>57-60�A>>70-86�ӂ�Ŋ��o�����A
95�����MIT�̃��{�b�g�ւ̕]����>>108��>>136�ɏ����Ă���B
�ߋ����X��ǂ߂ƌ����������������Ȃ��B
�u�������v���ǂ����̒�`�ɂ��Ă�>>57-60�A>>70-86�ӂ�Ŋ��o�����A
95�����MIT�̃��{�b�g�ւ̕]����>>108��>>136�ɏ����Ă���B
180 �F���J�����������F04/12/17 17:04:46 ID:MrMYx++l
>>171
����3km=�b����0.83m����
����3km=�b����0.83m����
181 �F���J�����������F04/12/17 21:27:33 ID:cnDwlsGr
�������RKm/h
�E�E�E����3km����3km/h�����͂����肵�ė~�����E�E�E
���A�����x���H
�E�E�E����3km����3km/h�����͂����肵�ė~�����E�E�E
���A�����x���H
182 �F���J�����������F04/12/18 01:42:12 ID:xlG66wTW
�N�A�N�����D�D�D���Ƃ��N���I���R�{���ɂȂ����̂���
ttp://www.itmedia.co.jp/lifestyle/articles/0412/17/news077_2.html
ttp://www.itmedia.co.jp/lifestyle/articles/0412/17/news077_2.html
183 �F���J�����������F04/12/18 03:34:50 ID:3ZOB7Ngm
PC Watch�̎�����ASIMO�̋L��
ttp://pc.watch.impress.co.jp/docs/2004/1216/honda.htm
���������A��̂������܂���Ƃ����͎̂Y�����̑��s���{�b�g�ł������Ă��ȁB
>>182
�L�����I�A�N���I���Ⴄ���B
http://pc.watch.impress.co.jp/docs/2004/1217/sony2.htm
�������ɂ͂����Ƃ������������B
�V�Z�p�́u���R���e�v���Č����Ă邯�ǁA������������A�V�r������ڒn���Ă���
�x������ܐ旧���ɂ��ďd�S�ړ����Ă邾�����ۂ��B
ttp://www.kawalab.dnj.ynu.ac.jp/~taro/kawalab/research/biped_walking/index.html
�P�ɂ����̐}4����A�}5�̕��s���@�ɂȂ��������ŁA���O�t����قǂ�
�V�Z�p�ł������Ǝv�����B�z���_�Ƃ��͊��ɂ���Ă邵�B
ttp://pc.watch.impress.co.jp/docs/2004/1216/honda.htm
���������A��̂������܂���Ƃ����͎̂Y�����̑��s���{�b�g�ł������Ă��ȁB
>>182
�L�����I�A�N���I���Ⴄ���B
http://pc.watch.impress.co.jp/docs/2004/1217/sony2.htm
�������ɂ͂����Ƃ������������B
�V�Z�p�́u���R���e�v���Č����Ă邯�ǁA������������A�V�r������ڒn���Ă���
�x������ܐ旧���ɂ��ďd�S�ړ����Ă邾�����ۂ��B
ttp://www.kawalab.dnj.ynu.ac.jp/~taro/kawalab/research/biped_walking/index.html
�P�ɂ����̐}4����A�}5�̕��s���@�ɂȂ��������ŁA���O�t����قǂ�
�V�Z�p�ł������Ǝv�����B�z���_�Ƃ��͊��ɂ���Ă邵�B
184 �F���J�����������F04/12/18 04:12:24 ID:3ZOB7Ngm
��̃��X��������ASIMO�̓�������Ԃ��ĂĎv�������ǁA
ASIMO�̑��s�����āA�������̎��Ɣ�ׂđS�R�ܐ�������オ���ĂȂ��ȁB
���̂��A�ŁA�R�}����Ō���Ƒ������̕��������Ă�悤�Ɍ�����B
���s�Fttp://pc.watch.impress.co.jp/docs/2004/1216/honda0222.mov
�������Fttp://pc.watch.impress.co.jp/docs/2004/1216/honda0189.mov
�܂��A���s�������Őڒn����ƏՌ�������Ȃ��Ƃ��A�n�[�h�E�F�A�̐���
����̂����m��Ȃ����ǁA����ASIMO�̂ܐ�Ɏ��R�x��t���āA����Ƃ��ɂ��ܐ��
�n�ʂ��R�邱�Ƃ��o����悤�ɂ��邾���ŁA���Ȃ�l�Ԃɋ߂����肪�o�������ȋC������B
ASIMO�̑��s�����āA�������̎��Ɣ�ׂđS�R�ܐ�������オ���ĂȂ��ȁB
���̂��A�ŁA�R�}����Ō���Ƒ������̕��������Ă�悤�Ɍ�����B
���s�Fttp://pc.watch.impress.co.jp/docs/2004/1216/honda0222.mov
�������Fttp://pc.watch.impress.co.jp/docs/2004/1216/honda0189.mov
�܂��A���s�������Őڒn����ƏՌ�������Ȃ��Ƃ��A�n�[�h�E�F�A�̐���
����̂����m��Ȃ����ǁA����ASIMO�̂ܐ�Ɏ��R�x��t���āA����Ƃ��ɂ��ܐ��
�n�ʂ��R�邱�Ƃ��o����悤�ɂ��邾���ŁA���Ȃ�l�Ԃɋ߂����肪�o�������ȋC������B
185 �F���J�����������F04/12/18 12:18:15 ID:3ZOB7Ngm
186 �F���J�����������F04/12/18 13:12:57 ID:LrVHU+Iq
>183
>�P�ɂ����̐}4����A�}5�̕��s���@�ɂȂ��������ŁA���O�t����قǂ�
>�V�Z�p�ł������Ǝv�����B�z���_�Ƃ��͊��ɂ���Ă邵�B
QRIO�͑O�㍶�E����������ɂ��ꂪ�ł���
(�����̑��ʂƂ��p���g�������s���ł���)
�̂ŁA�Ȃ��Ȃ�������������ł���B
>�P�ɂ����̐}4����A�}5�̕��s���@�ɂȂ��������ŁA���O�t����قǂ�
>�V�Z�p�ł������Ǝv�����B�z���_�Ƃ��͊��ɂ���Ă邵�B
QRIO�͑O�㍶�E����������ɂ��ꂪ�ł���
(�����̑��ʂƂ��p���g�������s���ł���)
�̂ŁA�Ȃ��Ȃ�������������ł���B
187 �F���J�����������F04/12/18 16:08:19 ID:3ZOB7Ngm
>>186
�_���X�̂悤�ȃV�[�P���X������ۂ��i�r���œ|�ꂽ�肷��̂�
����ɂ����v���Ă���ǁj�p�t�H�[�}���X����Ȃ��A
�������쒆�ɂ��������p�����䂪�o����悤�ɂȂ����̂Ȃ�A
����͊m���ɐ����B
���������̂͂����ƃA�s�[�����Ă���Ă����̂ɁB
�Ȃ�Ƃ������AROBO-ONE�Ńv���C�o�b�N�^�̏��^���{�b�g���A
���܂�ɏ�肭�����̂����Ă��܂��Ă��邩��A�����悤�ȑ傫����
QRIO���F�X����ĂĂ��A���ꂪ�ǂ��܂Ŏ�������Ȃ̂��^����
���܂��āA����f���Ɋ����ł��Ȃ��B
ASIMO���������肷��̂́A����o���ĂȂ���Γ]�Ԃ킯������A
���ɂ킩��₷�����ǁB
�_���X�̂悤�ȃV�[�P���X������ۂ��i�r���œ|�ꂽ�肷��̂�
����ɂ����v���Ă���ǁj�p�t�H�[�}���X����Ȃ��A
�������쒆�ɂ��������p�����䂪�o����悤�ɂȂ����̂Ȃ�A
����͊m���ɐ����B
���������̂͂����ƃA�s�[�����Ă���Ă����̂ɁB
�Ȃ�Ƃ������AROBO-ONE�Ńv���C�o�b�N�^�̏��^���{�b�g���A
���܂�ɏ�肭�����̂����Ă��܂��Ă��邩��A�����悤�ȑ傫����
QRIO���F�X����ĂĂ��A���ꂪ�ǂ��܂Ŏ�������Ȃ̂��^����
���܂��āA����f���Ɋ����ł��Ȃ��B
ASIMO���������肷��̂́A����o���ĂȂ���Γ]�Ԃ킯������A
���ɂ킩��₷�����ǁB
188 �F���J�����������F04/12/18 16:39:15 ID:3ZOB7Ngm
>>187
�ϊ��~�X�A�~������������
�ϊ��~�X�A�~������������
189 �F95=101�F04/12/19 07:46:03 ID:RLyE0yBd
>>175����A�x���Ȃ��Ă��݂܂���B
��������[�t��]�Ƃ������������āA�Ȃ��Ȃ��������݂ł��Ȃ��Đ\����Ȃ��ł��B
�u�y�l�o����ő��s���s�\�v�Ƃ����킯�ɂ͂����Ȃ��Ȃ�܂����ˁB���͂�`�r�h�l�n�́A�Ȃ�Ȃ�ɂ�
�u�����āv�܂�����A��������ς��Ȃ��ƁB�Ƃ����킯�ŁA�u������@�����ł����Ă��A���͂Ői�ނƂ���
�Œ�ϔO�ł���Ă�����A�l�ԂƓ����悤�Ɋɋ}���݂ɕ����A����悤�ɂȂ���͉i�v�ɂ���Ă��Ȃ����낤�v
�ƌ������Ƃɂ��܂��B�u�}�v�Ƃ́A�������u�l�Ԃ�葬���v�Ƃ������Ƃł��B2050�N�ɂ̓T�b�J�[��
���{�b�g�Ɛl�Ԃ̃��[���h�J�b�v�����Ƃ������Ă܂����A����Ȑ�ł��l�Ԃ̑���ɂ͂Ȃ蓾�Ȃ���
�������ƂɂȂ�܂��B
����̑���`�r�h�l�n�́A���s���獘�������߂đ��s�ֈڂ��Ă͂��܂����A�����̎��Ԃ��������̂��ɂ߂�
�Z���̂ŁA���s�Ƃ������[�Q�i�ϑ�]�ŁA�Ƃɂ��������������Ă��Ȃ����Ԃ��u�n�c�����{�v��蒷���ł����A
�Ƃ������炢�̈�ۂł��ˁB����Ƃ����̂Ȃ�A����ς�����X�s�[�h�̍Œ�ł��Q�{���炢�͏o���ė~����
�Ƃ���ł��B
�����Q�������s�Ƃ����̂́A�_�𗧂Ăĉ��ɕ��s�ړ������Ă����悤�Ȃ��̂ŁA�́A�����w�Z�̍��A�|���̎��Ԃ�
�z�E�L���t���Ɏ�̕��ɗ��ĂėV��ł܂������A�_����̕��ɗ��ĂĐi��ł����͓̂�����̂ł��B
���{�b�g����������点��̂́A��̕����E�֍��ւƌ��݂ɕς��Ȃ���_�𗧂đ����Ȃ���Ȃ�Ȃ��悤�Ȃ��̂ŁA
����͐��Ɏ���̃��U�ƌ����܂��B
���́A���͂Ői�ނƂ����l���Ȃ�����@�́A��̕��ɗ��Ă��_�̃o�����X���Ƃ邽�߂Ɏ�̕���O�㍶�E�ɓ������̂�
�����悤�Ȃ��̂ƌ�����ł��傤�B
�_�̐^�����߂A�ǂ��������ɂ��Ă��f�R�e�ՂɂȂ�Ƃ������Ƃ͒N�ł��m���Ă���Ǝv���܂����A���ꂪ
���s�ɂ�����܂��B�⓹���M�b�`���R�M�b�`���R�Ɨh��Ȃ���~��Ă䂭���s�́A���Ŗ{�̂�i�܂��悤��
�͂��o���̂ł͂Ȃ��A�O����̗�(�d��)�Ŗ{�̑S�̂��i���(�⓹�ɉ����ė���)�������̂ł��B���̖����́A
���i�݂͂����K�v������܂���A�̏d���x���邾���ŗǂ��Ƃ������ƂŁA�_�̐^�����ށ��g�̂�
���S(���̂�����)�ɐ��i�͂���������A�ƁA�r�̐���͊i�i�ɗe�ՂɂȂ�킯�ł��B�⓹�������Ă��铮��́A
���{�b�g�Ƃ����悤�Ȃ��̂ł͂Ȃ��Ă����̍��g�݂����ŁA���䂷�炵�Ȃ��čς�ł��郏�P�ł�����ˁB
�܂��܂��u�����v�̕����ł����Ȃ��̂Ő\����Ȃ��ł����A�Ƃɂ����������Ă�̂ł͂Ȃ��Ƃ������Ƃ����ł�
�����Ă��炢�����Ď��}���J�L�R�����Ă��炢�܂����B
��������[�t��]�Ƃ������������āA�Ȃ��Ȃ��������݂ł��Ȃ��Đ\����Ȃ��ł��B
�u�y�l�o����ő��s���s�\�v�Ƃ����킯�ɂ͂����Ȃ��Ȃ�܂����ˁB���͂�`�r�h�l�n�́A�Ȃ�Ȃ�ɂ�
�u�����āv�܂�����A��������ς��Ȃ��ƁB�Ƃ����킯�ŁA�u������@�����ł����Ă��A���͂Ői�ނƂ���
�Œ�ϔO�ł���Ă�����A�l�ԂƓ����悤�Ɋɋ}���݂ɕ����A����悤�ɂȂ���͉i�v�ɂ���Ă��Ȃ����낤�v
�ƌ������Ƃɂ��܂��B�u�}�v�Ƃ́A�������u�l�Ԃ�葬���v�Ƃ������Ƃł��B2050�N�ɂ̓T�b�J�[��
���{�b�g�Ɛl�Ԃ̃��[���h�J�b�v�����Ƃ������Ă܂����A����Ȑ�ł��l�Ԃ̑���ɂ͂Ȃ蓾�Ȃ���
�������ƂɂȂ�܂��B
����̑���`�r�h�l�n�́A���s���獘�������߂đ��s�ֈڂ��Ă͂��܂����A�����̎��Ԃ��������̂��ɂ߂�
�Z���̂ŁA���s�Ƃ������[�Q�i�ϑ�]�ŁA�Ƃɂ��������������Ă��Ȃ����Ԃ��u�n�c�����{�v��蒷���ł����A
�Ƃ������炢�̈�ۂł��ˁB����Ƃ����̂Ȃ�A����ς�����X�s�[�h�̍Œ�ł��Q�{���炢�͏o���ė~����
�Ƃ���ł��B
�����Q�������s�Ƃ����̂́A�_�𗧂Ăĉ��ɕ��s�ړ������Ă����悤�Ȃ��̂ŁA�́A�����w�Z�̍��A�|���̎��Ԃ�
�z�E�L���t���Ɏ�̕��ɗ��ĂėV��ł܂������A�_����̕��ɗ��ĂĐi��ł����͓̂�����̂ł��B
���{�b�g����������点��̂́A��̕����E�֍��ւƌ��݂ɕς��Ȃ���_�𗧂đ����Ȃ���Ȃ�Ȃ��悤�Ȃ��̂ŁA
����͐��Ɏ���̃��U�ƌ����܂��B
���́A���͂Ői�ނƂ����l���Ȃ�����@�́A��̕��ɗ��Ă��_�̃o�����X���Ƃ邽�߂Ɏ�̕���O�㍶�E�ɓ������̂�
�����悤�Ȃ��̂ƌ�����ł��傤�B
�_�̐^�����߂A�ǂ��������ɂ��Ă��f�R�e�ՂɂȂ�Ƃ������Ƃ͒N�ł��m���Ă���Ǝv���܂����A���ꂪ
���s�ɂ�����܂��B�⓹���M�b�`���R�M�b�`���R�Ɨh��Ȃ���~��Ă䂭���s�́A���Ŗ{�̂�i�܂��悤��
�͂��o���̂ł͂Ȃ��A�O����̗�(�d��)�Ŗ{�̑S�̂��i���(�⓹�ɉ����ė���)�������̂ł��B���̖����́A
���i�݂͂����K�v������܂���A�̏d���x���邾���ŗǂ��Ƃ������ƂŁA�_�̐^�����ށ��g�̂�
���S(���̂�����)�ɐ��i�͂���������A�ƁA�r�̐���͊i�i�ɗe�ՂɂȂ�킯�ł��B�⓹�������Ă��铮��́A
���{�b�g�Ƃ����悤�Ȃ��̂ł͂Ȃ��Ă����̍��g�݂����ŁA���䂷�炵�Ȃ��čς�ł��郏�P�ł�����ˁB
�܂��܂��u�����v�̕����ł����Ȃ��̂Ő\����Ȃ��ł����A�Ƃɂ����������Ă�̂ł͂Ȃ��Ƃ������Ƃ����ł�
�����Ă��炢�����Ď��}���J�L�R�����Ă��炢�܂����B
190 �F175�F04/12/20 00:22:53 ID:8vwtTDXk
>>189
���肪�Ƃ��������܂��B
�o������A�������肾���Z�����̂��낤�Ǝv���Ă����̂ŁA�C�ɂ��Ȃ��ėǂ��ł���B
> �����������Ă��Ȃ����Ԃ��u�n�c�����{�v��蒷���ł����A�Ƃ������炢�̈�ۂł��ˁB
ASIMO�̕������s���x�������������A����Ȉ�ۂ���̂ł����A
���ۂɂ͎Y�����̕����؋Ԃ͋͂��ɒ����悤�ł��i>>170�j�B
> ���s�́A���Ŗ{�̂�i�܂��悤�Ɨ͂��o���̂ł͂Ȃ��A�O����̗�(�d��)��
> �{�̑S�̂��i���(�⓹�ɉ����ė���)�������̂ł��B
> �g�̂̒��S(���̂�����)�ɐ��i�͂���������A�ƁA�r�̐���͊i�i�ɗe�ՂɂȂ�킯�ł��B
�Ȃ�قǁB
�����āA�⓹�̎��s�̂悤�ɊȒP�ɋr�𐧌䂷��̂��A���n�ł��\�ɂ���̂�
�e�R�̃��J�j�Y���Ƃ������ƂɂȂ�̂ł��傤���B
���ł��ǂ��̂ŁA�܂����������肢���܂��B
���肪�Ƃ��������܂��B
�o������A�������肾���Z�����̂��낤�Ǝv���Ă����̂ŁA�C�ɂ��Ȃ��ėǂ��ł���B
> �����������Ă��Ȃ����Ԃ��u�n�c�����{�v��蒷���ł����A�Ƃ������炢�̈�ۂł��ˁB
ASIMO�̕������s���x�������������A����Ȉ�ۂ���̂ł����A
���ۂɂ͎Y�����̕����؋Ԃ͋͂��ɒ����悤�ł��i>>170�j�B
> ���s�́A���Ŗ{�̂�i�܂��悤�Ɨ͂��o���̂ł͂Ȃ��A�O����̗�(�d��)��
> �{�̑S�̂��i���(�⓹�ɉ����ė���)�������̂ł��B
> �g�̂̒��S(���̂�����)�ɐ��i�͂���������A�ƁA�r�̐���͊i�i�ɗe�ՂɂȂ�킯�ł��B
�Ȃ�قǁB
�����āA�⓹�̎��s�̂悤�ɊȒP�ɋr�𐧌䂷��̂��A���n�ł��\�ɂ���̂�
�e�R�̃��J�j�Y���Ƃ������ƂɂȂ�̂ł��傤���B
���ł��ǂ��̂ŁA�܂����������肢���܂��B
191 �F���J�����������F04/12/20 22:01:04 ID:jIZDs06x
>>189
���s�͓K�ȏ����p�����[�^��^���Ă��Ȃ���
�����ƕ����܂���B����͂��Ȃ����ł��B
�{�̂̐^���x���Ă���悤�ȃ��f���ɂ�
�Ȃ蓾�܂���B�|���U�q�̕����߂��ł��B
���s+����ɂ��������錤�����Ȃ���Ă��܂����A
�����ZMP��������A
ZMP���ɍa�����Ă���̂�����ł��B
���s�͓K�ȏ����p�����[�^��^���Ă��Ȃ���
�����ƕ����܂���B����͂��Ȃ����ł��B
�{�̂̐^���x���Ă���悤�ȃ��f���ɂ�
�Ȃ蓾�܂���B�|���U�q�̕����߂��ł��B
���s+����ɂ��������錤�����Ȃ���Ă��܂����A
�����ZMP��������A
ZMP���ɍa�����Ă���̂�����ł��B
192 �F95=101�F04/12/20 23:41:04 ID:9s8PMWvW
�������ꂵ���ł��ˁB�ڂ�������A���ۂɌ�������Ă�����ɉ�����Ă��炦��ƁA��R����オ��ł��傤�B
191����A���݂܂���B�u���s�v�Ƃ������t���E�J�c�Ɏg���Ă��܂��Đ\����Ȃ��ł��B
���ۂ̃��{�b�g�H�w�Ō���[���s]�ƁA���������Ă���u���ɐ����̗͂��������郁�J�j�Y���v�ɂ��
�����s�Ƃ͑S�R�Ⴄ���̂ł��ˁB�n�߂Ɂu���͂ɂ��Ȃ����i�͂��肫�v�ȂǂƂ����O��ȂǁA�펯�ł�
�l�����Ȃ����Ƃł�����ˁB�c���ƌĂԂƂ����ł����ˁB�u�e�R�ɂ��I���s�v�c�������H
���A�u�����v�𖡕��ɂ��邩�G�ɉ��A�Ƃ����ϓ_����̈ӌ��������Ă܂��B�܂�������Ǝ��Ԃ�
�����肻���ł��̂ŁB
191����A���݂܂���B�u���s�v�Ƃ������t���E�J�c�Ɏg���Ă��܂��Đ\����Ȃ��ł��B
���ۂ̃��{�b�g�H�w�Ō���[���s]�ƁA���������Ă���u���ɐ����̗͂��������郁�J�j�Y���v�ɂ��
�����s�Ƃ͑S�R�Ⴄ���̂ł��ˁB�n�߂Ɂu���͂ɂ��Ȃ����i�͂��肫�v�ȂǂƂ����O��ȂǁA�펯�ł�
�l�����Ȃ����Ƃł�����ˁB�c���ƌĂԂƂ����ł����ˁB�u�e�R�ɂ��I���s�v�c�������H
���A�u�����v�𖡕��ɂ��邩�G�ɉ��A�Ƃ����ϓ_����̈ӌ��������Ă܂��B�܂�������Ǝ��Ԃ�
�����肻���ł��̂ŁB
193 �F���J�����������F04/12/20 23:47:47 ID:fvNRCL6h
���̎D�y���������s���{�b�g����肽�����̂��B
194 �F���J�����������F04/12/21 01:28:42 ID:QBvce0tT
>>191
>>189�ł������s�́A�R����������ƕ��������ߋ�̕����߂������ˁB
���s�ƈꊇ��ɂ����Ă��A�⓹��������́A��납�牟���Ă�邱�Ƃ�
�������̂ƐF�X���邵�B
> �����ZMP��������AZMP���ɍa�����Ă���̂�����ł��B
�m���ɓ�����ǁA�������Ƃ��ɂ͂����Ă������̌����ɐi��ŗ~�����ȁB
��̌����I�Ȗ��Ƃ��āAZMP����W�̋Z�p���āA�z���_�ɂ��Ȃ������
�ł߂��Ă���ł���B��w������̌������ɂ͈Ⴄ������͍����āA
�ǂ�ǂ�Z�p�����J���čs���ė~�����B
>>192
95���̂����悤�Ȃ��Ƃ��A���ۂɍl���Ă���l�͈ꉞ�����ˁB
ttp://pc.watch.impress.co.jp/docs/2004/1026/kyokai0940.jpg
ttp://pc.watch.impress.co.jp/docs/2004/1026/kyokai0948.jpg
�i���L���Fttp://pc.watch.impress.co.jp/docs/2004/1026/kyokai30.htm�j
����́A�uROBO-ONE on PC�v���Ă����A1/6�̏d�͉��i���ʁj�Ń��{�b�g�𑖂点����A
�W�����v�����悤�Ƃ����V�~�����[�V�����R���e�X�g�̎Q���҂���Ă���
�p�b�V�u�E�H�[�N�^�̃A���S���Y���B
���̃R���e�X�g���̂��A��d�͉��ł̃��{�b�g�̓����ƌ������ƂŁA
���̂܂܃n�[�h�̐��\���オ��Ζ{���ɐl�Ԃ̂悤�ȓ������o����̂���
���f���邽�߂̈�̖ڈ��ƂȂ�Ƃ����Ӗ��ŁA���ɋ����[���B
����Ȓ��ŁA�������������l�Ԃɋ߂���������悤�Ƃ���l���o�Ă���̂�
���R���낤���A�����Əo�Ă���ׂ��B
�ŁA����Ȓ��ŁA95���̂悤�Ȑl�Ԃ̓�������ɂ���Ă�l�Ƃ��A
�ʂ̎��_�̈ӌ��Ƃ����̂͏d�v���Ǝv���B
�O��̈ӌ��́A���ł���Ă�l���炷��A�u����ȒP���Ȃ��Ƃ���Ȃ��v
���Ă����̂����R���邾�낤���ǁA���̕ӂ͎w�E�����݊���čs����
���݂����炩�̎��n�͂���͂�����ˁB
>>189�ł������s�́A�R����������ƕ��������ߋ�̕����߂������ˁB
���s�ƈꊇ��ɂ����Ă��A�⓹��������́A��납�牟���Ă�邱�Ƃ�
�������̂ƐF�X���邵�B
> �����ZMP��������AZMP���ɍa�����Ă���̂�����ł��B
�m���ɓ�����ǁA�������Ƃ��ɂ͂����Ă������̌����ɐi��ŗ~�����ȁB
��̌����I�Ȗ��Ƃ��āAZMP����W�̋Z�p���āA�z���_�ɂ��Ȃ������
�ł߂��Ă���ł���B��w������̌������ɂ͈Ⴄ������͍����āA
�ǂ�ǂ�Z�p�����J���čs���ė~�����B
>>192
95���̂����悤�Ȃ��Ƃ��A���ۂɍl���Ă���l�͈ꉞ�����ˁB
ttp://pc.watch.impress.co.jp/docs/2004/1026/kyokai0940.jpg
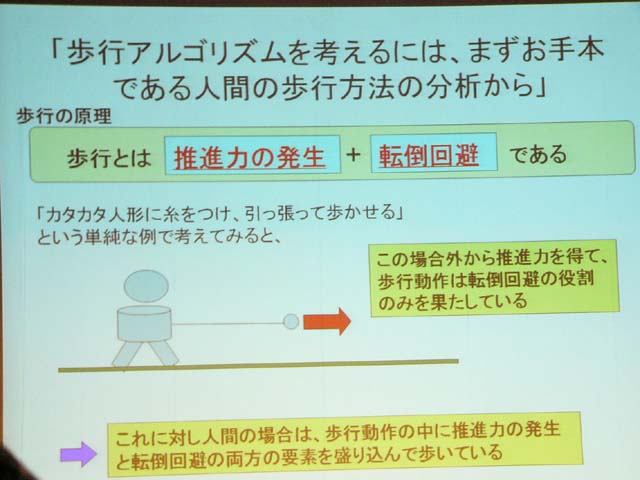{kind=link}
ttp://pc.watch.impress.co.jp/docs/2004/1026/kyokai0948.jpg
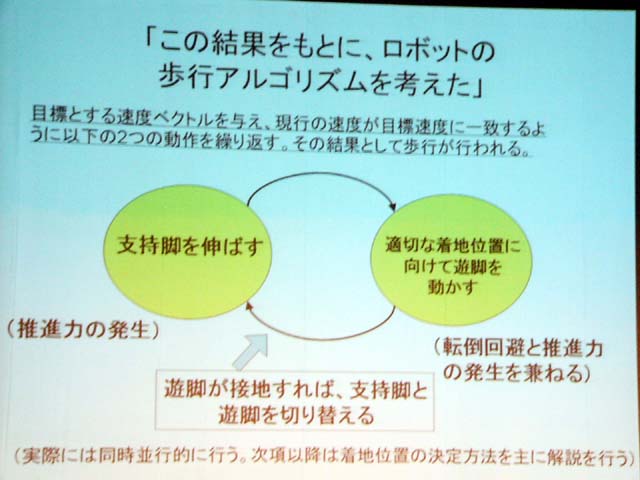{kind=link}
�i���L���Fttp://pc.watch.impress.co.jp/docs/2004/1026/kyokai30.htm�j
����́A�uROBO-ONE on PC�v���Ă����A1/6�̏d�͉��i���ʁj�Ń��{�b�g�𑖂点����A
�W�����v�����悤�Ƃ����V�~�����[�V�����R���e�X�g�̎Q���҂���Ă���
�p�b�V�u�E�H�[�N�^�̃A���S���Y���B
���̃R���e�X�g���̂��A��d�͉��ł̃��{�b�g�̓����ƌ������ƂŁA
���̂܂܃n�[�h�̐��\���オ��Ζ{���ɐl�Ԃ̂悤�ȓ������o����̂���
���f���邽�߂̈�̖ڈ��ƂȂ�Ƃ����Ӗ��ŁA���ɋ����[���B
����Ȓ��ŁA�������������l�Ԃɋ߂���������悤�Ƃ���l���o�Ă���̂�
���R���낤���A�����Əo�Ă���ׂ��B
�ŁA����Ȓ��ŁA95���̂悤�Ȑl�Ԃ̓�������ɂ���Ă�l�Ƃ��A
�ʂ̎��_�̈ӌ��Ƃ����̂͏d�v���Ǝv���B
�O��̈ӌ��́A���ł���Ă�l���炷��A�u����ȒP���Ȃ��Ƃ���Ȃ��v
���Ă����̂����R���邾�낤���ǁA���̕ӂ͎w�E�����݊���čs����
���݂����炩�̎��n�͂���͂�����ˁB
195 �F���J�����������F04/12/21 12:25:01 ID:4TM/+s7I
>>191 ����̂�����u���s�v�Ƃ����̂́A�������́u���i�́v�ɂȂ��Ă����ł����H
196 �F���J�����������F04/12/21 12:41:25 ID:gLQCMAR6
�����悭�E�E�E
197 �F���J���������� ��eVMppbOxBU �F04/12/21 20:07:22 ID:pSZ7mCP0
�́H
198 �F���J�����������F04/12/21 22:23:55 ID:QBvce0tT
>>186
���������AQRIO�̎��R���e�̏ڍׂɂ��Ă�
���{�b�g�w��Ŕ��\���������炵�����ǁA���ꕷ�����̂��ȁH
���\�̓��e�ɂ��Ēm���Ă�l������A�ȒP�ł�������
�ǂ�Ȃ��������ė~�����ȁB
���������AQRIO�̎��R���e�̏ڍׂɂ��Ă�
���{�b�g�w��Ŕ��\���������炵�����ǁA���ꕷ�����̂��ȁH
���\�̓��e�ɂ��Ēm���Ă�l������A�ȒP�ł�������
�ǂ�Ȃ��������ė~�����ȁB
199 �F���J�����������F04/12/22 22:23:20 ID:SOYdko4e
�؍��̃q���[�{�͂ǂ�ȕ����ł��傤�H���悪�������`
http://japanese.chosun.com/site/data/html_dir/2004/12/22/20041222000002.html
http://japanese.chosun.com/site/data/html_dir/2004/12/22/20041222000002.html
200 �F���J�����������F04/12/22 22:53:13 ID:TqV8cpnz
95�̐l�������Ă�̂͋ɘ_�����
���C�W���[���̃c���c���̏��̏�őS�������グ���ɕ������Ď��Ȃ̂���
���C�W���[���̃c���c���̏��̏�őS�������グ���ɕ������Ď��Ȃ̂���
201 �F���J�����������F04/12/23 00:55:47 ID:w+9kvgKh
����A���C�W���[���̃c���c���̏��̏�ł������グ�܂����Ă��낢����Ε������Ă��Ƃ���Ȃ��H
���d�s�v�c�ȗ��_���B
���d�s�v�c�ȗ��_���B
202 �F���J�����������F04/12/23 11:33:48 ID:oaMuFEeh
200��201�͉������Ⴂ���Ă�H�@�X�T����͖��C���ǂ��̂����̌����ĂȂ�����H
�d�͂����i�͂ɂȂ蓾�Ȃ����Ă̂͏����Ă��������A������d�͂��v��Ȃ����ēǂ݈Ⴆ���̂�
�������c���H�@
138�Ɂu�����Ă݂āv�Ə����Ă���A����O�ɏo�������A�Ƃ����̂�����Ă݂����A�m���ɃX�b��
�i�ށB����͕s�v�c�Ƃ����Εs�v�c���B����������ƃX�S�C������������B
�d�͂����i�͂ɂȂ蓾�Ȃ����Ă̂͏����Ă��������A������d�͂��v��Ȃ����ēǂ݈Ⴆ���̂�
�������c���H�@
138�Ɂu�����Ă݂āv�Ə����Ă���A����O�ɏo�������A�Ƃ����̂�����Ă݂����A�m���ɃX�b��
�i�ށB����͕s�v�c�Ƃ����Εs�v�c���B����������ƃX�S�C������������B
203 �F���J�����������F04/12/23 12:15:08 ID:IFejOy0a
�W�����v�ړ���X�L�b�v�����s�ɂȂ�̂Ƒf�l�̑f�p�ȋ^��B
204 �F���J�����������F04/12/23 17:33:30 ID:kqwyUn6C
���͂͊m���Ɏ邪�A
���͂��ӎ����Ȃ����s�A���S���Y���Ƃ������Ƃ��H
���͂��ӎ����Ȃ����s�A���S���Y���Ƃ������Ƃ��H
205 �F95=101�F04/12/24 18:42:32 ID:2fJ4/Iu6
��̕��ɗ��Ă��_�̃o�����X�����Ȃ��瑁�����Ƃ��A�������o��������Ǝv���܂����A�����ɖ_��
�|��Ă��܂��͂��ł��B����̓X�s�[�h���オ�邱�Ƃɂ���āA�_�Ɋ����ɂ��͂Ƌ�C��R��
�͂��炭�悤�ɂȂ��āA��Ńo�����X������Ă����̂������Ă��܂�(�������A�������������Ƃł�
�����Ă��܂��܂����B)���Ƃɂ��܂��B�����Rkm���炢�Ȃ�e���͂قƂ�ǖ����̂ł��傤���A
����ȏ�ɑ����Ȃ�����A�����ɂ��͂���C��R���A���ɃX�s�[�h�̂Q��ɔ�Ⴕ�ċ����Ȃ�܂�����A
�}�ɉe�����o��悤�ɂȂ�A�������邱�Ƃ͂ł��Ȃ��Ȃ�܂��B
�l�Ԃ�[�������̕���]�́A���X�ɉ������Ă����āA���̌�A�قړ����ړ��ɂȂ�̂ɑ��A�r�͈ړ����Ȃ���
�O��Ɍ����������܂��B������G��܂���L������Ƃ����ό`���J��Ԃ��Ȃ���A�ł��B
����͑��ɂ͂��炭�����ɂ��͂Ƌ�C��R���ڂ܂��邵���傫�����������ω����Ă���Ƃ������Ƃ�
�Ӗ����܂��B�ڂɂ͑S�������܂��A�v���͕s�\�ł��傤���A���ɂ͂���ȗ͂��͂��炢�Ă���킯�ł��B
�l�Ԍ^�̃��{�b�g�ɂ��������Ƃ��N���܂����A���͂ɂ�鐄�i�̏ꍇ�ɂ́A���n�������ɁA���̐��i�͂ނ��߂�
�n�ʂɗ͂������铮��������Ȃ���Ȃ�܂��A�܂��A���̒��n�Ńu���[�L��������悤�Ȃ��ƂɂȂ�ƁA
���܂������悤�ɂȂ��āA������ɃR�P�Ă��܂����Ƃ����郏�P�ł��B(���̑O�ɉ����ł��Ȃ��Ă͂����Ȃ��̂�
�R�P���ɉ����ł���悤�ɂȂ��Ă���̘b�ł����ǂˁB)���𒅂��ʒu�������v�Z���Đ��䂵�悤�Ƃ��Ă��A��������
�O�͂ɂ���āu�x�炳��܂���v���𐧌�ł���ł��傤���H
�|��Ă��܂��͂��ł��B����̓X�s�[�h���オ�邱�Ƃɂ���āA�_�Ɋ����ɂ��͂Ƌ�C��R��
�͂��炭�悤�ɂȂ��āA��Ńo�����X������Ă����̂������Ă��܂�(�������A�������������Ƃł�
�����Ă��܂��܂����B)���Ƃɂ��܂��B�����Rkm���炢�Ȃ�e���͂قƂ�ǖ����̂ł��傤���A
����ȏ�ɑ����Ȃ�����A�����ɂ��͂���C��R���A���ɃX�s�[�h�̂Q��ɔ�Ⴕ�ċ����Ȃ�܂�����A
�}�ɉe�����o��悤�ɂȂ�A�������邱�Ƃ͂ł��Ȃ��Ȃ�܂��B
�l�Ԃ�[�������̕���]�́A���X�ɉ������Ă����āA���̌�A�قړ����ړ��ɂȂ�̂ɑ��A�r�͈ړ����Ȃ���
�O��Ɍ����������܂��B������G��܂���L������Ƃ����ό`���J��Ԃ��Ȃ���A�ł��B
����͑��ɂ͂��炭�����ɂ��͂Ƌ�C��R���ڂ܂��邵���傫�����������ω����Ă���Ƃ������Ƃ�
�Ӗ����܂��B�ڂɂ͑S�������܂��A�v���͕s�\�ł��傤���A���ɂ͂���ȗ͂��͂��炢�Ă���킯�ł��B
�l�Ԍ^�̃��{�b�g�ɂ��������Ƃ��N���܂����A���͂ɂ�鐄�i�̏ꍇ�ɂ́A���n�������ɁA���̐��i�͂ނ��߂�
�n�ʂɗ͂������铮��������Ȃ���Ȃ�܂��A�܂��A���̒��n�Ńu���[�L��������悤�Ȃ��ƂɂȂ�ƁA
���܂������悤�ɂȂ��āA������ɃR�P�Ă��܂����Ƃ����郏�P�ł��B(���̑O�ɉ����ł��Ȃ��Ă͂����Ȃ��̂�
�R�P���ɉ����ł���悤�ɂȂ��Ă���̘b�ł����ǂˁB)���𒅂��ʒu�������v�Z���Đ��䂵�悤�Ƃ��Ă��A��������
�O�͂ɂ���āu�x�炳��܂���v���𐧌�ł���ł��傤���H
206 �F95=101�F04/12/24 19:18:48 ID:2fJ4/Iu6
���A�x���Ȃ������l�т������̂�Y��Ă܂����B�������������Ǝ��Ԃ�����悤��
�Ȃ�܂��B����܂łɂ��낢�뎿�₵�Ă��ꂽ���ւ̃��X�������܂��B
>>202 ����A�����Ă݂���ł��ˁB�n�ʂ��R��Ƃ������Ƃ��̗͈͂�ؓ��ꂸ�ɁA����
����O�ɏo�������A�ł��B�ӎ����镔�������낢��ς��āA�Ⴆ�u�������v�Ƃ��A
�u�G���v�Ƃ�����Ă݂�ƁA�i�ݕ�������Ă��܂���B
�Ȃ�܂��B����܂łɂ��낢�뎿�₵�Ă��ꂽ���ւ̃��X�������܂��B
>>202 ����A�����Ă݂���ł��ˁB�n�ʂ��R��Ƃ������Ƃ��̗͈͂�ؓ��ꂸ�ɁA����
����O�ɏo�������A�ł��B�ӎ����镔�������낢��ς��āA�Ⴆ�u�������v�Ƃ��A
�u�G���v�Ƃ�����Ă݂�ƁA�i�ݕ�������Ă��܂���B
207 �F95=101�F04/12/24 19:22:47 ID:2fJ4/Iu6
����̑���̎��H�ŁA�Ⴆ�u���̐^���v�ɒ��n�����悤�Ƃ���ƁA����o���ł͍��̐^�����
���ɒ��n���܂����A�X�s�[�h���オ��ƍ��̐^�����O�ɒ��n����悤�ɂȂ�܂��B
����o���ł͐g�̂��O�ɓ������ƂŃY���āA�X�s�[�h���オ���Ă���́A�����O�ɐU�����ꂽ
�悤�ɂȂ邱�ƂŃY����Ƃ������Ƃł��ˁB
QRIO�̓����ɂ́A���͂��Ȃ��a���������܂��B(���R���e�c���R�H�h�R���H�@���w�e�x�H�I
�i���W�������H)�ȂC�������`����ł��B�C���������̒��g�́A�����̃X�s�[�h���₦��
�ω����Ă��邱�Ƃł��B�ڂŌ��Ă��Ė��ӎ��ɗ\������X�s�[�h�����Ƃ��Ƃ�������Ƃ���
�C�����̈����B����́A�����̓��������ۂ��Ă��铮���Ȃ�ł��ˁB�u���x�Ȑ���@�v��
���𒅂���ꏊ�����߂Ă��A�����̉e��������A���䂪�����Ă��܂���ł���B
�����犵���̂͂��炫�͋��₵�Ă��܂�Ȃ��Ƃ����Ȃ��킯�ŁA�Ƃ������Ƃ́A����ȏ��
�X�s�[�h�͏o���Ȃ��Ƃ������Ƃł��B
�R�P�Ȃ��Ƃ������ƂɊւ��ẮA�����Ƃ����͖̂{���͖����ł���͂��Ȃ�ł��B
������x�X�s�[�h���オ��ƁA�����ɂ���āu�|��ɂ����Ȃ�v�Ƃ����͎̂��]�ԂȂł�
�킩��Ǝv���܂��B�܂��A�w�����������R�P��܂ł̎��Ԃ���������͂��Ȃ�ł��B�Ƃ����̂�
�u�O�͂̂悤�Ȑ��i�͂Ă���ꍇ�v�̘b�ŁA���͂Ő��i����ꍇ�ɂ͂����͂����܂���B
���{�b�g�����^������Ƃ����͈̂ꌩ�i���̂悤�Ɏv����������܂����A���ۂ̂Ƃ���́A
�u�K�v������v�Ȃ�ł��B�l�h�s�̃N���Q�̂悤�ɁA���ʂ��ɗ͏W�����āA���U�����Ȃ�����
���₷���킯�ŁA�`�r�h�l�n����̂��A���������߂�̂ɂ́A���������Ӗ�������Ǝv���܂��B
���ɒ��n���܂����A�X�s�[�h���オ��ƍ��̐^�����O�ɒ��n����悤�ɂȂ�܂��B
����o���ł͐g�̂��O�ɓ������ƂŃY���āA�X�s�[�h���オ���Ă���́A�����O�ɐU�����ꂽ
�悤�ɂȂ邱�ƂŃY����Ƃ������Ƃł��ˁB
QRIO�̓����ɂ́A���͂��Ȃ��a���������܂��B(���R���e�c���R�H�h�R���H�@���w�e�x�H�I
�i���W�������H)�ȂC�������`����ł��B�C���������̒��g�́A�����̃X�s�[�h���₦��
�ω����Ă��邱�Ƃł��B�ڂŌ��Ă��Ė��ӎ��ɗ\������X�s�[�h�����Ƃ��Ƃ�������Ƃ���
�C�����̈����B����́A�����̓��������ۂ��Ă��铮���Ȃ�ł��ˁB�u���x�Ȑ���@�v��
���𒅂���ꏊ�����߂Ă��A�����̉e��������A���䂪�����Ă��܂���ł���B
�����犵���̂͂��炫�͋��₵�Ă��܂�Ȃ��Ƃ����Ȃ��킯�ŁA�Ƃ������Ƃ́A����ȏ��
�X�s�[�h�͏o���Ȃ��Ƃ������Ƃł��B
�R�P�Ȃ��Ƃ������ƂɊւ��ẮA�����Ƃ����͖̂{���͖����ł���͂��Ȃ�ł��B
������x�X�s�[�h���オ��ƁA�����ɂ���āu�|��ɂ����Ȃ�v�Ƃ����͎̂��]�ԂȂł�
�킩��Ǝv���܂��B�܂��A�w�����������R�P��܂ł̎��Ԃ���������͂��Ȃ�ł��B�Ƃ����̂�
�u�O�͂̂悤�Ȑ��i�͂Ă���ꍇ�v�̘b�ŁA���͂Ő��i����ꍇ�ɂ͂����͂����܂���B
���{�b�g�����^������Ƃ����͈̂ꌩ�i���̂悤�Ɏv����������܂����A���ۂ̂Ƃ���́A
�u�K�v������v�Ȃ�ł��B�l�h�s�̃N���Q�̂悤�ɁA���ʂ��ɗ͏W�����āA���U�����Ȃ�����
���₷���킯�ŁA�`�r�h�l�n����̂��A���������߂�̂ɂ́A���������Ӗ�������Ǝv���܂��B
208 �F���J�����������F04/12/25 00:16:03 ID:I5Sf6dHI
���`�r�h�l�n����̂��A���������߂�̂ɂ́A���������Ӗ�������Ǝv���܂��B
��������
���̂ւ�̃��{�b�g�͂��ׂĎx���r�̑������S�Əd�S�����|���U�q�Ƃ���
���s�^�����`��������B
�������A�d�S�ʒu�ƌҊ߈ʒu���قȂ�̂͂������A�V�r�����̈���̂��ߐU��o������A
���[���܂�胂�[�����g��ł��������߂̘r�̓���ȂǁA
�Ҋ߂Əd�S����v�����Ȃ��v�f���傢�ɑ��݂���B
���̂��߁A�d�S���|���U�q�Ƃ��Ă̋O�����ێ����邽�߂ɂ́A�r�S�̂̒�����
�������߂���K�v��������̂�
���̏ꍇ�G�̋Ȃ��L���ł����ċr�������邵���Ȃ��̂����A
�G���L�т����Ă�����َp���ŋr�����k�߂邽�߂ɂ�
�G�߂ɖc��Ȋp���x���v�������(�Ȃ��Ȃ�sin0=0������)�B
������̊p���x��v������̂͌����I�ł͂Ȃ��A
������x�܂������ĕG���Ȃ��Ă����A�v���p���x�������I�Ȕ͈͂Ɏ��܂�悤
�z������K�v������B
���ꂪ�AASIMO��QRIO��HRP�̃��{�b�g���펞�G���Ȃ��ĕ�����������Ȃ����R���B
������������ɂ́A�|���U�q���f����������x��������Ƃ������p���_�C���̕ύX���A
�Ҋ߂⑫��Ȃǂɏ㉺�����鎩�R�x��lj�����Ȃǂ̏璷�ȍ\�����̗p���˂Ȃ�Ȃ��B
��������
���̂ւ�̃��{�b�g�͂��ׂĎx���r�̑������S�Əd�S�����|���U�q�Ƃ���
���s�^�����`��������B
�������A�d�S�ʒu�ƌҊ߈ʒu���قȂ�̂͂������A�V�r�����̈���̂��ߐU��o������A
���[���܂�胂�[�����g��ł��������߂̘r�̓���ȂǁA
�Ҋ߂Əd�S����v�����Ȃ��v�f���傢�ɑ��݂���B
���̂��߁A�d�S���|���U�q�Ƃ��Ă̋O�����ێ����邽�߂ɂ́A�r�S�̂̒�����
�������߂���K�v��������̂�
���̏ꍇ�G�̋Ȃ��L���ł����ċr�������邵���Ȃ��̂����A
�G���L�т����Ă�����َp���ŋr�����k�߂邽�߂ɂ�
�G�߂ɖc��Ȋp���x���v�������(�Ȃ��Ȃ�sin0=0������)�B
������̊p���x��v������̂͌����I�ł͂Ȃ��A
������x�܂������ĕG���Ȃ��Ă����A�v���p���x�������I�Ȕ͈͂Ɏ��܂�悤
�z������K�v������B
���ꂪ�AASIMO��QRIO��HRP�̃��{�b�g���펞�G���Ȃ��ĕ�����������Ȃ����R���B
������������ɂ́A�|���U�q���f����������x��������Ƃ������p���_�C���̕ύX���A
�Ҋ߂⑫��Ȃǂɏ㉺�����鎩�R�x��lj�����Ȃǂ̏璷�ȍ\�����̗p���˂Ȃ�Ȃ��B
209 �F���J�����������F04/12/25 00:16:24 ID:I5Sf6dHI
���`�r�h�l�n����̂��A���������߂�̂ɂ́A���������Ӗ�������Ǝv���܂��B
��������
���̂ւ�̃��{�b�g�͂��ׂĎx���r�̑������S�Əd�S�����|���U�q�Ƃ���
���s�^�����`��������B
�������A�d�S�ʒu�ƌҊ߈ʒu���قȂ�̂͂������A�V�r�����̈���̂��ߐU��o������A
���[���܂�胂�[�����g��ł��������߂̘r�̓���ȂǁA
�Ҋ߂Əd�S����v�����Ȃ��v�f���傢�ɑ��݂���B
���̂��߁A�d�S���|���U�q�Ƃ��Ă̋O�����ێ����邽�߂ɂ́A�r�S�̂̒�����
�������߂���K�v��������̂�
���̏ꍇ�G�̋Ȃ��L���ł����ċr�������邵���Ȃ��̂����A
�G���L�т����Ă�����َp���ŋr�����k�߂邽�߂ɂ�
�G�߂ɖc��Ȋp���x���v�������(�Ȃ��Ȃ�sin0=0������)�B
������̊p���x��v������̂͌����I�ł͂Ȃ��A
������x�܂������ĕG���Ȃ��Ă����A�v���p���x�������I�Ȕ͈͂Ɏ��܂�悤
�z������K�v������B
���ꂪ�AASIMO��QRIO��HRP�̃��{�b�g���펞�G���Ȃ��ĕ�����������Ȃ����R���B
������������ɂ́A�|���U�q���f����������x��������Ƃ������p���_�C���̕ύX���A
�Ҋ߂⑫��Ȃǂɏ㉺�����鎩�R�x��lj�����Ȃǂ̏璷�ȍ\�����̗p���˂Ȃ�Ȃ��B
��������
���̂ւ�̃��{�b�g�͂��ׂĎx���r�̑������S�Əd�S�����|���U�q�Ƃ���
���s�^�����`��������B
�������A�d�S�ʒu�ƌҊ߈ʒu���قȂ�̂͂������A�V�r�����̈���̂��ߐU��o������A
���[���܂�胂�[�����g��ł��������߂̘r�̓���ȂǁA
�Ҋ߂Əd�S����v�����Ȃ��v�f���傢�ɑ��݂���B
���̂��߁A�d�S���|���U�q�Ƃ��Ă̋O�����ێ����邽�߂ɂ́A�r�S�̂̒�����
�������߂���K�v��������̂�
���̏ꍇ�G�̋Ȃ��L���ł����ċr�������邵���Ȃ��̂����A
�G���L�т����Ă�����َp���ŋr�����k�߂邽�߂ɂ�
�G�߂ɖc��Ȋp���x���v�������(�Ȃ��Ȃ�sin0=0������)�B
������̊p���x��v������̂͌����I�ł͂Ȃ��A
������x�܂������ĕG���Ȃ��Ă����A�v���p���x�������I�Ȕ͈͂Ɏ��܂�悤
�z������K�v������B
���ꂪ�AASIMO��QRIO��HRP�̃��{�b�g���펞�G���Ȃ��ĕ�����������Ȃ����R���B
������������ɂ́A�|���U�q���f����������x��������Ƃ������p���_�C���̕ύX���A
�Ҋ߂⑫��Ȃǂɏ㉺�����鎩�R�x��lj�����Ȃǂ̏璷�ȍ\�����̗p���˂Ȃ�Ȃ��B
210 �F���J�����������F04/12/25 00:18:59 ID:I5Sf6dHI
���`�r�h�l�n����̂��A���������߂�̂ɂ́A���������Ӗ�������Ǝv���܂��B
��������
���̂ւ�̃��{�b�g�͂��ׂĎx���r�̑������S�Əd�S�����|���U�q�Ƃ���
���s�^�����`��������B
�������A�d�S�ʒu�ƌҊ߈ʒu���قȂ�̂͂������A�V�r�����̈���̂��ߐU��o������A
���[���܂�胂�[�����g��ł��������߂̘r�̓���ȂǁA
�Ҋ߂Əd�S����v�����Ȃ��v�f���傢�ɑ��݂���B
���̂��߁A�d�S���|���U�q�Ƃ��Ă̋O�����ێ����邽�߂ɂ́A�r�S�̂̒�����
�������߂���K�v��������̂�
���̏ꍇ�G�̋Ȃ��L���ł����ċr�������邵���Ȃ��̂����A
�G���L�т����Ă�����َp���ŋr�����k�߂邽�߂ɂ�
�G�߂ɖc��Ȋp���x���v�������(�Ȃ��Ȃ�sin0=0������)�B
������̊p���x��v������̂͌����I�ł͂Ȃ��A
������x�܂������ĕG���Ȃ��Ă����A�v���p���x�������I�Ȕ͈͂Ɏ��܂�悤
�z������K�v������B
���ꂪ�AASIMO��QRIO��HRP�̃��{�b�g���펞�G���Ȃ��ĕ�����������Ȃ����R���B
������������ɂ́A�|���U�q���f����������x��������Ƃ������p���_�C���̕ύX���A
�Ҋ߂⑫��Ȃǂɏ㉺�����鎩�R�x��lj�����Ȃǂ̏璷�ȍ\�����̗p���˂Ȃ�Ȃ��B
��������
���̂ւ�̃��{�b�g�͂��ׂĎx���r�̑������S�Əd�S�����|���U�q�Ƃ���
���s�^�����`��������B
�������A�d�S�ʒu�ƌҊ߈ʒu���قȂ�̂͂������A�V�r�����̈���̂��ߐU��o������A
���[���܂�胂�[�����g��ł��������߂̘r�̓���ȂǁA
�Ҋ߂Əd�S����v�����Ȃ��v�f���傢�ɑ��݂���B
���̂��߁A�d�S���|���U�q�Ƃ��Ă̋O�����ێ����邽�߂ɂ́A�r�S�̂̒�����
�������߂���K�v��������̂�
���̏ꍇ�G�̋Ȃ��L���ł����ċr�������邵���Ȃ��̂����A
�G���L�т����Ă�����َp���ŋr�����k�߂邽�߂ɂ�
�G�߂ɖc��Ȋp���x���v�������(�Ȃ��Ȃ�sin0=0������)�B
������̊p���x��v������̂͌����I�ł͂Ȃ��A
������x�܂������ĕG���Ȃ��Ă����A�v���p���x�������I�Ȕ͈͂Ɏ��܂�悤
�z������K�v������B
���ꂪ�AASIMO��QRIO��HRP�̃��{�b�g���펞�G���Ȃ��ĕ�����������Ȃ����R���B
������������ɂ́A�|���U�q���f����������x��������Ƃ������p���_�C���̕ύX���A
�Ҋ߂⑫��Ȃǂɏ㉺�����鎩�R�x��lj�����Ȃǂ̏璷�ȍ\�����̗p���˂Ȃ�Ȃ��B
211 �F���J�����������F04/12/25 01:04:29 ID:I5Sf6dHI
���߂�悭�킩��_�u����
212 �F���J�����������F04/12/25 01:37:09 ID:v8dj+xG0
>>207 ���e
gait�̂��ƂˁB�u���l�v�Ƃ����Ɣn�̕������ɂȂ�̂ŁA�l�Ԃ̏ꍇ��
�u���e�v�ɂ�����Ȃ��������ȁB�ڂ������Ƃ͖Y�ꂽ�B
>>208
>������x�܂������ĕG���Ȃ��Ă����A�v���p���x�������I�Ȕ͈͂Ɏ��܂�悤
>�z������K�v������B
���̑O�A����ɑ���킩��₷���������������̂Ń�������ɓ\���Ă����B
�@�@�I��L������Ԃ���A�����P�Z���`�قnj��ɋ߂Â��Ă݂Ă��������B
�@�@�I�߂̊p�x���}�ɑ傫���Ȃ邱�Ƃ��킩��܂��B
�@�@����A�I�߂��傫���Ȃ�������ԂŎ����߂Â���ꍇ�͂��܂蓮���܂���B
�ittp://www.mech.tohoku-gakuin.ac.jp/rde/contents/course/robotics/manipulator.html#BBEYN1F03XB�j
�|���U�q���f�����g���Ă����A��l�ԓI�ȓ����͉�������Ȃ����낤�ȁB
gait�̂��ƂˁB�u���l�v�Ƃ����Ɣn�̕������ɂȂ�̂ŁA�l�Ԃ̏ꍇ��
�u���e�v�ɂ�����Ȃ��������ȁB�ڂ������Ƃ͖Y�ꂽ�B
>>208
>������x�܂������ĕG���Ȃ��Ă����A�v���p���x�������I�Ȕ͈͂Ɏ��܂�悤
>�z������K�v������B
���̑O�A����ɑ���킩��₷���������������̂Ń�������ɓ\���Ă����B
�@�@�I��L������Ԃ���A�����P�Z���`�قnj��ɋ߂Â��Ă݂Ă��������B
�@�@�I�߂̊p�x���}�ɑ傫���Ȃ邱�Ƃ��킩��܂��B
�@�@����A�I�߂��傫���Ȃ�������ԂŎ����߂Â���ꍇ�͂��܂蓮���܂���B
�ittp://www.mech.tohoku-gakuin.ac.jp/rde/contents/course/robotics/manipulator.html#BBEYN1F03XB�j
�|���U�q���f�����g���Ă����A��l�ԓI�ȓ����͉�������Ȃ����낤�ȁB
213 �F�Q�O�Q�F04/12/25 04:16:54 ID:grahsGqk
>>95�̂Q�O�U�@��������Ă݂Ă��B�ʔ����ˁB�r�̐�[�Ƃ��Ă̑����A
�G���S�̑傫�ȕ������������悭�i�ނˁB
�Q�O�W�́u�Ⴄ��v�̂ЂƂ��Ƃ́A�u���������߂�v�̎��Ⴆ����Ȃ����H
�X�T���́u����v���Ɉ�i���𗎂Ƃ��Ă邱�Ƃ������Ă���B
�G���S�̑傫�ȕ������������悭�i�ނˁB
�Q�O�W�́u�Ⴄ��v�̂ЂƂ��Ƃ́A�u���������߂�v�̎��Ⴆ����Ȃ����H
�X�T���́u����v���Ɉ�i���𗎂Ƃ��Ă邱�Ƃ������Ă���B
���Q�O�W�́u�Ⴄ��v�̂ЂƂ��Ƃ́A�u���������߂�v�̎��Ⴆ����Ȃ����H
���X�T���́u����v���Ɉ�i���𗎂Ƃ��Ă邱�Ƃ������Ă���B
�ǂ���>95�͕��s�̘b�����Ă�̂����s�̘b�����Ă�̂��킩��Â炢�ȁB
�ŁA�����ł����u���������߂�v���Ă̂́u�G���Ȃ���v�̂Ƃ͕ʂ̘b���H
���X�T���́u����v���Ɉ�i���𗎂Ƃ��Ă邱�Ƃ������Ă���B
�ǂ���>95�͕��s�̘b�����Ă�̂����s�̘b�����Ă�̂��킩��Â炢�ȁB
�ŁA�����ł����u���������߂�v���Ă̂́u�G���Ȃ���v�̂Ƃ͕ʂ̘b���H
215 �F���J�����������F04/12/25 16:31:11 ID:v8dj+xG0
���s���ɏ�́i���́j�����߂Ă�̂́A�X���b�v�h�~�����
�o�����X����ׂ̈������悤�ȁB
�EHRP-2LR
> ���{�b�g�S�̂̉^���ʂƋ��Ɛڒn���̊e�^���ʂ𐳊m�ɐݒ�ł���
> �u�����^���ʐ���v�ƌĂԎ�@��V���ɊJ�����邱�Ƃʼn��������B
> ���̎�@��HRP-2LR�ɓK�p����Ƙr�Ȃ��ŋ��̃o�����X�ێ����s�����߁A
> ���̂����₭���݂��ރp�^�[���ƂȂ�B
ttp://www.aist.go.jp/aist_j/press_release/pr2004/pr20040415_2/pr20040415_2.html
�EASIMO
> ���s�̂��߂ɂ̓W�����v���Ȃ���Ȃ�Ȃ��B���̂��߂ɒn�ʂ��R��Ȃ����
> �Ȃ�Ȃ��킯�����A���ۂɂ͒n�ʂ��R��ƁA���Ƃ̐ݒu�ʂ����Ȃ��Ȃ�̂ŁA
> �X�s���ƃX���b�v���������Ă��܂��B���̂��ߍŏ��͂��܂����ׂȂ������Ƃ����B
> �l�Ԃ͖��ӎ��̂����ɂ���𐧌䂵�Ă���킯�����A������ASIMO�ł͏�̂�
> �����ŃX���b�v���J�o�[�����B
>�@�u�X�̏��������Ǝv���Ɛl�Ԃł����R�ɏ�̂������݂܂���ˁB
> ��������p���܂����v(�J���ӔC�҂̏d�����j��)
ttp://pc.watch.impress.co.jp/docs/2004/1216/honda.htm
�o�����X����ׂ̈������悤�ȁB
�EHRP-2LR
> ���{�b�g�S�̂̉^���ʂƋ��Ɛڒn���̊e�^���ʂ𐳊m�ɐݒ�ł���
> �u�����^���ʐ���v�ƌĂԎ�@��V���ɊJ�����邱�Ƃʼn��������B
> ���̎�@��HRP-2LR�ɓK�p����Ƙr�Ȃ��ŋ��̃o�����X�ێ����s�����߁A
> ���̂����₭���݂��ރp�^�[���ƂȂ�B
ttp://www.aist.go.jp/aist_j/press_release/pr2004/pr20040415_2/pr20040415_2.html
�EASIMO
> ���s�̂��߂ɂ̓W�����v���Ȃ���Ȃ�Ȃ��B���̂��߂ɒn�ʂ��R��Ȃ����
> �Ȃ�Ȃ��킯�����A���ۂɂ͒n�ʂ��R��ƁA���Ƃ̐ݒu�ʂ����Ȃ��Ȃ�̂ŁA
> �X�s���ƃX���b�v���������Ă��܂��B���̂��ߍŏ��͂��܂����ׂȂ������Ƃ����B
> �l�Ԃ͖��ӎ��̂����ɂ���𐧌䂵�Ă���킯�����A������ASIMO�ł͏�̂�
> �����ŃX���b�v���J�o�[�����B
>�@�u�X�̏��������Ǝv���Ɛl�Ԃł����R�ɏ�̂������݂܂���ˁB
> ��������p���܂����v(�J���ӔC�҂̏d�����j��)
ttp://pc.watch.impress.co.jp/docs/2004/1216/honda.htm
216 �F���J�����������F04/12/25 18:24:36 ID:grahsGqk
����A�グ�Ƃ��Ȃ��Ɠǂ߂Ȃ��Ȃ��Ȃ����ȁH
217 �F���J�����������F04/12/25 18:50:40 ID:grahsGqk
>>214 208�ł��������Ă��̂́A�u�G���Ȃ����Ă���v�Ƃ������A���̌�r�݂�����
�u�r���p�Ȃ��Ă���v�Ƃ������������肾�낤�ˁB����ȋr���Ⴀ�i�T�P�������Ă�ŁA
�������ɋr���܂������ɂ�����ď����Ă��l�������ȁB
�u�r���p�Ȃ��Ă���v�Ƃ������������肾�낤�ˁB����ȋr���Ⴀ�i�T�P�������Ă�ŁA
�������ɋr���܂������ɂ�����ď����Ă��l�������ȁB
218 �F���J�����������F04/12/25 20:31:08 ID:wHIMesl0
http://plaza.rakuten.co.jp/batrowa/
�����ɍs���ăQ�[���̂��Ƃ��ꂩ��w��<���M�D�L>��ް
�����ɍs���ăQ�[���̂��Ƃ��ꂩ��w��<���M�D�L>��ް
219 �F���J�����������F04/12/27 17:16:48 ID:88EgkS3o
�グ�@�N���`
220 �F���J�����������F04/12/27 20:08:23 ID:kQXHmAT9
138������Ă݂���
�d�S�ړ����Ȃ��ƍŏ��̂P�����������Ȃ��B
�������Ԉ���Ă���낤���B
�d�S�ړ����Ȃ��ƍŏ��̂P�����������Ȃ��B
�������Ԉ���Ă���낤���B
221 �F95=101�F04/12/27 21:34:58 ID:88EgkS3o
>>220 ����͂����炭�A���삪�������߂��邩�炾�Ǝv���܂��B���삪�x�߂���ƁA
���X������ɂȂ��ăe�R���`������Ȃ���ł���B���ʂ̕����������炢�Ŏ����Ă݂ĉ������B
138�ɏ����Ă���̂́A���Ƃ��Ƃ͑��邽�߂̂��̂������̂�����̂ɃA�����W�������̂ł��B
�����100��11�b�Q���x�X�g�������q���A�P������10�b�U�܂ł��������Ƃ�����܂����B
���X������ɂȂ��ăe�R���`������Ȃ���ł���B���ʂ̕����������炢�Ŏ����Ă݂ĉ������B
138�ɏ����Ă���̂́A���Ƃ��Ƃ͑��邽�߂̂��̂������̂�����̂ɃA�����W�������̂ł��B
�����100��11�b�Q���x�X�g�������q���A�P������10�b�U�܂ł��������Ƃ�����܂����B
222 �F95=101�F04/12/28 01:36:33 ID:WM9SwfS/
���傭���傭�`���Ă͂�����ł����A�����Ԃ����ƎQ���ł��Ȃ��āA�I�}�P�Ɂu�l�吙�v�Ƃ��ŁA
������ƑO�̕��ɂ����̂ڂ邱�Ƃ��ł��Ȃ��ďł����܂��܂����B
�Ȃb��̓W�J�����������������ł��ˁB
>>�|���U�q���f�����g���Ă����A��l�ԓI�ȓ����͉�������Ȃ����낤�ȁB
>>�d�S���|���U�q�Ƃ��Ă̋O�����ێ����邽�߂ɂ́A�r�S�̂̒����𒀎����߂���K�v��������
�|���U�q�̋O���ŏd�S���ړ������Ă������Ƃ��Ă���̂ł���A�n�ʔ��͂ɂ�鐄�i�Ɍ����
���Ă����Ȃ����H�@�Ɗ��҂ł������ɂ��v�����ł����A���s�Ƃ����s�̏ꍇ�ɃX���[�Y��
�d�S���ڍs������̂ł���A����́u�|���U�q�̋O���v�Ȃǂł͂Ȃ��āA�����Ȓ�����ڕW�ɂ���
�ׂ��ł��傤�B�������A�U�q�Ȃ甼�a���ς�܂���A�r�̒����̒����͕K�v�Ȃ������Ɏv����ŁA
�����A�D�ɗ����܂���ˁB
�r�̒����̒����́A�d�S�𐅕��Ɉړ������Ă������Ƃ���ꍇ�̕����͂邩�ɏd�v�ŁA���̂��߂ɂ�
����̋��L���L���Ȃ�ł����A����̋��L���x�̕ω��ł͏\���Ƃ͌����Ȃ��ł��傤�B
�r�S�̂̒�����傫�������ł���悤�ɂ��悤�Ƃ���A�l�Ԃ̋r�̌`���l�c�������̌㎈�̌`��
��������K���Ă��܂��B�ǂ����Ă����͂Ői�݂����̂ł���A�l�Ԃ̋r�̌`�͒��߂āA�l�c��������
�㎈�ɂ��邵���Ȃ��ł��ˁB
�܂������Ȃ�܂��̂ň�U��܂��B�Ȃ�ׂ������J�L�R�ł���悤�ɂ��܂��B
������ƑO�̕��ɂ����̂ڂ邱�Ƃ��ł��Ȃ��ďł����܂��܂����B
�Ȃb��̓W�J�����������������ł��ˁB
>>�|���U�q���f�����g���Ă����A��l�ԓI�ȓ����͉�������Ȃ����낤�ȁB
>>�d�S���|���U�q�Ƃ��Ă̋O�����ێ����邽�߂ɂ́A�r�S�̂̒����𒀎����߂���K�v��������
�|���U�q�̋O���ŏd�S���ړ������Ă������Ƃ��Ă���̂ł���A�n�ʔ��͂ɂ�鐄�i�Ɍ����
���Ă����Ȃ����H�@�Ɗ��҂ł������ɂ��v�����ł����A���s�Ƃ����s�̏ꍇ�ɃX���[�Y��
�d�S���ڍs������̂ł���A����́u�|���U�q�̋O���v�Ȃǂł͂Ȃ��āA�����Ȓ�����ڕW�ɂ���
�ׂ��ł��傤�B�������A�U�q�Ȃ甼�a���ς�܂���A�r�̒����̒����͕K�v�Ȃ������Ɏv����ŁA
�����A�D�ɗ����܂���ˁB
�r�̒����̒����́A�d�S�𐅕��Ɉړ������Ă������Ƃ���ꍇ�̕����͂邩�ɏd�v�ŁA���̂��߂ɂ�
����̋��L���L���Ȃ�ł����A����̋��L���x�̕ω��ł͏\���Ƃ͌����Ȃ��ł��傤�B
�r�S�̂̒�����傫�������ł���悤�ɂ��悤�Ƃ���A�l�Ԃ̋r�̌`���l�c�������̌㎈�̌`��
��������K���Ă��܂��B�ǂ����Ă����͂Ői�݂����̂ł���A�l�Ԃ̋r�̌`�͒��߂āA�l�c��������
�㎈�ɂ��邵���Ȃ��ł��ˁB
�܂������Ȃ�܂��̂ň�U��܂��B�Ȃ�ׂ������J�L�R�ł���悤�ɂ��܂��B
223 �F���J�����������F04/12/28 01:44:03 ID:dv/xwBZq
�ǂ���>95�̘b�͗p��̎g�������H�w�n�ƈႤ��ō���B
�u�n�ʔ��͂ɂ�鐄�i�Ɍ���v�������n�ʂƂ̃C���^���N�V�����ȊO��
���i�͂�������Ƃ����͍̂H�w�I�ɂ͂��肦�Ȃ����A
���Ⴀ�����Ӗ����Ă�̂��Ƃ�����ΐ�������肭�ǂ��Ă悭�킩���B
�}����������B
�u�n�ʔ��͂ɂ�鐄�i�Ɍ���v�������n�ʂƂ̃C���^���N�V�����ȊO��
���i�͂�������Ƃ����͍̂H�w�I�ɂ͂��肦�Ȃ����A
���Ⴀ�����Ӗ����Ă�̂��Ƃ�����ΐ�������肭�ǂ��Ă悭�킩���B
�}����������B
224 �F���J�����������F04/12/28 11:01:31 ID:UkkpWAWu
>>223
�Â������ӁB>>95�̐����͂��ǂ���ɉ������������Ďd�����Ȃ��B
�P�ɁA�d�S��O�ɏo�����߂ɉ����锽�͂Ƃ肠���ߗ͂̔z���̃E�F�C�g���A
�x���r�łȂ��V�r���ɑ傫�߂ɂƂ�Ƃ��������ł͂Ȃ��̂��B
�܂��͘_���o���B���Ǖt���̂����Ƃ�������B�b�͂��ꂩ�炾�B
�Â������ӁB>>95�̐����͂��ǂ���ɉ������������Ďd�����Ȃ��B
�P�ɁA�d�S��O�ɏo�����߂ɉ����锽�͂Ƃ肠���ߗ͂̔z���̃E�F�C�g���A
�x���r�łȂ��V�r���ɑ傫�߂ɂƂ�Ƃ��������ł͂Ȃ��̂��B
�܂��͘_���o���B���Ǖt���̂����Ƃ�������B�b�͂��ꂩ�炾�B
225 �F���J�����������F04/12/29 03:59:19 ID:zZyERUwS
>>95�����
��p�u���E�U�g���ƁA�y�ł���B
ttp://www.monazilla.org/
���ꂩ��A���[�v���ŏ����Ă����_�����A�p�\�R���œǂݍ��߂Ȃ������ł����A
�R���o�[�^�\�t�g���g���A�ǂݍ��߂܂���B
ttp://ascii24.com/news/i/soft/article/2004/10/25/652201-000.html
��p�u���E�U�g���ƁA�y�ł���B
ttp://www.monazilla.org/
���ꂩ��A���[�v���ŏ����Ă����_�����A�p�\�R���œǂݍ��߂Ȃ������ł����A
�R���o�[�^�\�t�g���g���A�ǂݍ��߂܂���B
ttp://ascii24.com/news/i/soft/article/2004/10/25/652201-000.html
226 �F���J�����������F04/12/29 07:15:45 ID:qtFpJ9eP
�X�T
227 �F���J�����������F04/12/29 07:50:18 ID:qtFpJ9eP
���܂��B�X�T����̃��X�������ƓǂݕԂ��Ă݂����ǁA��肭�ǂ����Ă̂Ƃ͈Ⴄ�ȁB
�����Ă邱�Ƃ́u���̂܂܂ł͐l�Ԃ̂悤�ɑ��郍�{�b�g�͖����v�u���i�͂����͂ł�
�Ȃ��āA���ɔ�����������v�̂Q���Ǝv���B���̍������{�`�{�`�������Ă���悤��
���������ǂȁB����̐l�Ȃ���������A���t�̈Ⴂ�͂��傤���Ȃ�����B���������Ă̂�
224�̐l���̔��f�Ȃ�Ȃ����H
�����Ă邱�Ƃ́u���̂܂܂ł͐l�Ԃ̂悤�ɑ��郍�{�b�g�͖����v�u���i�͂����͂ł�
�Ȃ��āA���ɔ�����������v�̂Q���Ǝv���B���̍������{�`�{�`�������Ă���悤��
���������ǂȁB����̐l�Ȃ���������A���t�̈Ⴂ�͂��傤���Ȃ�����B���������Ă̂�
224�̐l���̔��f�Ȃ�Ȃ����H
228 �F���J�����������F04/12/29 08:33:10 ID:EScgPlqj
>227
�����t�̈Ⴂ�͂��傤���Ȃ�����
���Ⴀ�|��L�{��
�����t�̈Ⴂ�͂��傤���Ȃ�����
���Ⴀ�|��L�{��
229 �F���J�����������F04/12/29 15:11:39 ID:eXfqgz+A
>>228
���i�����ˁB
���i�����ˁB
230 �F���J�����������F04/12/30 03:00:27 ID:Dy/p+HUH
�@�@�@�@�@�@ , -�]''''"�L�P�M`�R��@�@�@ �@ �@ �@ �@ �@ �Q�Q�Q_
�@�@ �@ �@ /�@�@�@�@ �Q�@ �@ �@�R�@�@�@�@�@�@�@ �^�^�L �@ __,,���
�@�@�@�@ /�@�@�@�@ �@ �P�P�@�@ {�@�@�@�@�@ �@ /::/�@�^�P:::::::::::::::�_
�@ �@ �@ l�@_��Ʊ����ƁR�j._�@�@�@�@�@ /::::l�^::::::::::::::::::::::::::::::::l
�@�@�@�@ | 0Lj�^-�]-ڃm ɁQ�R:::�M�R�@�@ �@ l:::::::::::�^l�^l�m�m/_�C:::::l
�@�@�@�@ �:r�/�@��Á@�@�@��āM|::|�@�@�@�@�@ l:::::::::/ rtä �@.�tq l::::::|
�@�@�@ �@ l:ĺ@�@'"�@�@�@,j �@'"/Ɂ@�@�@�@�@ |::l�!j�@�@�L�@�@,j�@�@ !;:::/
�@�@�@�@�@�R�R��@�@�@r�]-, �@ /'�@�@ �@ �@ �@ �ذ ��@ �@ ,....,�@�@l�/�@�@�@�@
�@�@�@�@�@�@�@�@l�R��@�P�@�^�@�@�@�@�@�@�@�@�@�M�R�l�R � �P�@�^�L
�@�@�@�@�@�Q,r���]-�Mv�L-�]j-��Q�Q�@�@�@, -�]-�_r����'��]��
�@ �^�P/:.:.:.:|�P�P�MT�P�L|:.:.:.:l�L�@�M�R /�@�@�@�@�R�P`�[-�]'�L`''''�܁R�@�@�@�@�@�@�@�@�@
�^�@�@ ,':.:.:.:.:.l�@�@�@�@l�@�@ l:.:.:.l�@�@�@�@�_�@�@�Qr�]�-�-���,�@ �@ ��@�@ ',
�@�@ �@ |:.:.:.:.:.:.!�@�@ �@ !�@�@ !:.:.l�@�@�@,. -�]�T/// �r �r �r �r �r�@�@�@ !�@�@ ',
�@�@�@�@l:.:.:.:.:.:.���@�@ �@ |�@�@ l:.:.:l�@ �^�@�@�l�q�q�q�q '�@'�@' /���@�@�@l�@ �@ l
�@�@�@�@l:.:.:.:.:.:.!�@�@ �@ !�@�@ l:.:.:.�/�@�@ /�@�@```�L-��]'''"�@�@�@�@ /�@�@�@l
��Q�Q/:.:.:.:.:.:���@�@ �@ |�@ �@ |:.:.:�Ŕ@ l�@�@�@�@/�^�@�@ �@ �@ �@ /�@_ ��m
�@ �@ /:.:.:.:.:.:.:!�@�@�@�@l�@�@�@|:.:.:.:.:l `��R��Q�m�Ll��Q�Q�Q�Q__/lƓ�v
�Q___l:.:.:.:.:.:.:.|�@ �@ �@ l�@�@�@|:.:.:.:.:!�@�@�@�@�@ �@ |�Q�@ �i ( ) �j_�l|�@�@ l
�@�@�@l`�[�]�]'����l�P�Pl��t���@�@�@�@�@�@ /�@�@�P `�]�]'�L�@�R�@�@|�@
�@�@ �@ �@ /�@�@�@�@ �Q�@ �@ �@�R�@�@�@�@�@�@�@ �^�^�L �@ __,,���
�@�@�@�@ /�@�@�@�@ �@ �P�P�@�@ {�@�@�@�@�@ �@ /::/�@�^�P:::::::::::::::�_
�@ �@ �@ l�@_��Ʊ����ƁR�j._�@�@�@�@�@ /::::l�^::::::::::::::::::::::::::::::::l
�@�@�@�@ | 0Lj�^-�]-ڃm ɁQ�R:::�M�R�@�@ �@ l:::::::::::�^l�^l�m�m/_�C:::::l
�@�@�@�@ �:r�/�@��Á@�@�@��āM|::|�@�@�@�@�@ l:::::::::/ rtä �@.�tq l::::::|
�@�@�@ �@ l:ĺ@�@'"�@�@�@,j �@'"/Ɂ@�@�@�@�@ |::l�!j�@�@�L�@�@,j�@�@ !;:::/
�@�@�@�@�@�R�R��@�@�@r�]-, �@ /'�@�@ �@ �@ �@ �ذ ��@ �@ ,....,�@�@l�/�@�@�@�@
�@�@�@�@�@�@�@�@l�R��@�P�@�^�@�@�@�@�@�@�@�@�@�M�R�l�R � �P�@�^�L
�@�@�@�@�@�Q,r���]-�Mv�L-�]j-��Q�Q�@�@�@, -�]-�_r����'��]��
�@ �^�P/:.:.:.:|�P�P�MT�P�L|:.:.:.:l�L�@�M�R /�@�@�@�@�R�P`�[-�]'�L`''''�܁R�@�@�@�@�@�@�@�@�@
�^�@�@ ,':.:.:.:.:.l�@�@�@�@l�@�@ l:.:.:.l�@�@�@�@�_�@�@�Qr�]�-�-���,�@ �@ ��@�@ ',
�@�@ �@ |:.:.:.:.:.:.!�@�@ �@ !�@�@ !:.:.l�@�@�@,. -�]�T/// �r �r �r �r �r�@�@�@ !�@�@ ',
�@�@�@�@l:.:.:.:.:.:.���@�@ �@ |�@�@ l:.:.:l�@ �^�@�@�l�q�q�q�q '�@'�@' /���@�@�@l�@ �@ l
�@�@�@�@l:.:.:.:.:.:.!�@�@ �@ !�@�@ l:.:.:.�/�@�@ /�@�@```�L-��]'''"�@�@�@�@ /�@�@�@l
��Q�Q/:.:.:.:.:.:���@�@ �@ |�@ �@ |:.:.:�Ŕ@ l�@�@�@�@/�^�@�@ �@ �@ �@ /�@_ ��m
�@ �@ /:.:.:.:.:.:.:!�@�@�@�@l�@�@�@|:.:.:.:.:l `��R��Q�m�Ll��Q�Q�Q�Q__/lƓ�v
�Q___l:.:.:.:.:.:.:.|�@ �@ �@ l�@�@�@|:.:.:.:.:!�@�@�@�@�@ �@ |�Q�@ �i ( ) �j_�l|�@�@ l
�@�@�@l`�[�]�]'����l�P�Pl��t���@�@�@�@�@�@ /�@�@�P `�]�]'�L�@�R�@�@|�@
231 �F���J�����������F04/12/30 04:28:15 ID:lnjelXO4
�[�����s���{�b�g�����͂����̃J�l�̖��ʎg���B
���������ɂ�߂�B
���������ɂ�߂�B
232 �F���J�����������F04/12/30 05:11:51 ID:RAwfvlEA
����̓��P�b�g�̕��Ɍ����B
���{�̃��{�b�g�͐��E�Ɍւ�邪�A���{�̃��P�b�g�͓��{�̒p���B
���{�̃��{�b�g�͐��E�Ɍւ�邪�A���{�̃��P�b�g�͓��{�̒p���B
233 �F���J�����������F04/12/30 05:36:47 ID:lnjelXO4
�[�����s���{�b�g�������P�b�g�����͂����̃J�l�̖��ʎg���B
���������ɂ�߂�B ���E�Ɍւ��Ƃ������Ƃ�̕��삪������
�����̊��Ⴂ�B���������Ɏ����̃A�z���ɋC�t����
���������ɂ�߂�B ���E�Ɍւ��Ƃ������Ƃ�̕��삪������
�����̊��Ⴂ�B���������Ɏ����̃A�z���ɋC�t����
234 �F���J�����������F04/12/30 05:48:28 ID:RAwfvlEA
�u�����̊��Ⴂ�v�̍������q�ׂ�B
235 �F���J�����������F04/12/30 09:12:10 ID:FFdItRXA
���p���l
�@�R�̎Ζʂł��������ł���ւ�R�v�^�[�p�̑��Ƃ���
�A�`���Ƃ���
����?
�@�R�̎Ζʂł��������ł���ւ�R�v�^�[�p�̑��Ƃ���
�A�`���Ƃ���
����?
236 �F���J�����������F04/12/31 03:47:14 ID:qEMN+GvA
>>235
�ϑz����H
�ϑz����H
237 �F���J�����������F04/12/31 04:22:17 ID:sgsTRTQf
ޤ�_ �@ i �@i߁@�@.�^`:;,,___�m�@�@���@�@��@�@�@�@ �@�@ ߁@�@�@�@�@�@�@�@�i�@�@�@�m �@�@
�@�_`�' �@ i�@�^�^�L�@���@�@�@ �B �� �@�@�@�@�@�@���@�@�@��@�@�@�@�@�@�Q�Q_�@�@��
�@�@ `\�@ ��" ,�m�@ �@�@ �@�@�@��@�@........____......��___...._____.....__........_ |______|�@ �@�@�@�@ ���@��
�@�@�@ i �@ � �^�@�@�@���@ �@ �@ �� ,'"�@�@ �@ �P�@�@�P�@�@�P�� �@ �@`� i���i�@�@�@�@���@�@�@��
���@�@ | �@ /� �@,i'�܁R�A �@߁@�@�@,'�@,́A�B�@�� �@ o�@ ,�ցA�@�� �@�@`��`խ/�@�@�@�@�@�@ �
ޤ�__Ɂ@�@i �� �i�@�@�@ �j �@ �@ �@,'�@� � �@ �@ ��@�@�@/�@o�ցA�@ �@�@ `�_���@�@�
�@` �A� �@ Ɂ@�^`;;;;;_�m �@ �@ �@,'�@� /::`�A �� �@ �@�^ �^_____�_�@�@�@�@`��@�@�@�@�@���@�@��
�@�@ \�@�@i,�^�^�L�@�@�@�� �@�@,'�@� /��:`�A �@�@�@ i �@| |��|��| |�@��@ �@ `��@ �@ �@�@ �@ �@�@��
�@�@ i�@ ���^�@�@�@�@��@�@�@ ,'�@� /|i�i�|`��@ �B �@i.__|_|��|��|_|�@ �@�@�@�@���@�@�@�
�@�@/ �@ /�@�B �@ �@ �@ �@ �@,'�@� /..|i�i�|..`�A �@ �n �@ �P�P�P�@���@�@�@�@`��@�@�@�@�@�@�@��
�@./ �@ /�@�@ �@�@ �@�@ /__/::::�j�j:::::`�___�Q�Q�Q�Q�Q�Q�Q�Q�Q�Q`�B�@�@��
:::/�́@i�@�@�@�@�@ �@�@�@ | ||�@\"�P��\� | |߁@߁@߁@߁@߁@����߁@߁@߁@��|��
..i�@�@�@| �@ �@�n�@�@�@�@�@�@ |O�@ |o ��::| ��O�Ɠ�j|�~�c�c�c|�Ɠ�j|�@�@�@�@�@��
ɤ.......,i�. �Q�Q�@�@..�@�@�@�@ |..||�@ |$::::::::|�@| |��j�j��j�j�j��j�j�j|`�-�.,_.................................
�@�@�@�@�@�@�@�@�@,,,.,.,._.�--��\'''''^"�L,�=�'^"�L�P�P�P���P�P�P�P�P�P�P�P
�@J( '�`)��' �@�@�@�@�@�@�@�@,.�-�'^"�L�@�@�� �@
�@�@(�@ )�R('��`)Ɂ@ շ��̯÷��!!�@�@�@�@�@��
�@�@�b|�@�@(_�@_)�@�@�@�@�@�@�@�@....�@�@�n
�@�_`�' �@ i�@�^�^�L�@���@�@�@ �B �� �@�@�@�@�@�@���@�@�@��@�@�@�@�@�@�Q�Q_�@�@��
�@�@ `\�@ ��" ,�m�@ �@�@ �@�@�@��@�@........____......��___...._____.....__........_ |______|�@ �@�@�@�@ ���@��
�@�@�@ i �@ � �^�@�@�@���@ �@ �@ �� ,'"�@�@ �@ �P�@�@�P�@�@�P�� �@ �@`� i���i�@�@�@�@���@�@�@��
���@�@ | �@ /� �@,i'�܁R�A �@߁@�@�@,'�@,́A�B�@�� �@ o�@ ,�ցA�@�� �@�@`��`խ/�@�@�@�@�@�@ �
ޤ�__Ɂ@�@i �� �i�@�@�@ �j �@ �@ �@,'�@� � �@ �@ ��@�@�@/�@o�ցA�@ �@�@ `�_���@�@�
�@` �A� �@ Ɂ@�^`;;;;;_�m �@ �@ �@,'�@� /::`�A �� �@ �@�^ �^_____�_�@�@�@�@`��@�@�@�@�@���@�@��
�@�@ \�@�@i,�^�^�L�@�@�@�� �@�@,'�@� /��:`�A �@�@�@ i �@| |��|��| |�@��@ �@ `��@ �@ �@�@ �@ �@�@��
�@�@ i�@ ���^�@�@�@�@��@�@�@ ,'�@� /|i�i�|`��@ �B �@i.__|_|��|��|_|�@ �@�@�@�@���@�@�@�
�@�@/ �@ /�@�B �@ �@ �@ �@ �@,'�@� /..|i�i�|..`�A �@ �n �@ �P�P�P�@���@�@�@�@`��@�@�@�@�@�@�@��
�@./ �@ /�@�@ �@�@ �@�@ /__/::::�j�j:::::`�___�Q�Q�Q�Q�Q�Q�Q�Q�Q�Q`�B�@�@��
:::/�́@i�@�@�@�@�@ �@�@�@ | ||�@\"�P��\� | |߁@߁@߁@߁@߁@����߁@߁@߁@��|��
..i�@�@�@| �@ �@�n�@�@�@�@�@�@ |O�@ |o ��::| ��O�Ɠ�j|�~�c�c�c|�Ɠ�j|�@�@�@�@�@��
ɤ.......,i�. �Q�Q�@�@..�@�@�@�@ |..||�@ |$::::::::|�@| |��j�j��j�j�j��j�j�j|`�-�.,_.................................
�@�@�@�@�@�@�@�@�@,,,.,.,._.�--��\'''''^"�L,�=�'^"�L�P�P�P���P�P�P�P�P�P�P�P
�@J( '�`)��' �@�@�@�@�@�@�@�@,.�-�'^"�L�@�@�� �@
�@�@(�@ )�R('��`)Ɂ@ շ��̯÷��!!�@�@�@�@�@��
�@�@�b|�@�@(_�@_)�@�@�@�@�@�@�@�@....�@�@�n
238 �F���Ȃނ炫�悵�F04/12/31 19:46:48 ID:olfhCs9b
��`�����Ǔ��s�͂ł���L�P�[�I
239 �F���J�����������F05/01/01 03:17:09 ID:iJZYU5Vn
�@ �@�@�@�@�@�@�@�@�@�@�@ �@ �@�@�@�@�@�@ �@�@�@��-�\�\�\�[-';
�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@�@|�т킱��s �
�@�@�@�@�@�@�@�@�@ �@ �@�@ �@�@�@�@�@�@ �@�@�@�@��\-�\�\�\' �@�@�@
�@�@�@�@�@�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �^�@ �_�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@ �@ �@ �@�@�@�@ �@�@ �@ �i�P�P�P�j �@ �@ �@
�@ �@ �@ �@ �@�@ �@ �@ �@ �� �@�@�@�@�@�@ �i[[[[[[|]]]]]�j �@ �@ ,��
�@�@�@�@�@�@�@�@�@�@�@�@<��>�@ �@ �@ �@ [=|=|=|=|=|=]�@�@�@<��>
�@�@�@�@�@�@�@�@�@�@�@�^�܁_ �@ �@ �@ _|i�i|i�ii�i|i�|_�� �^�܁__
�@�@�@�@�@�@�@�@�@�@�@�n�M�M�m-��-��|ll||llll||lll��||lll��|lll|�P|]�M�M[_|
�@�@�@�@�@�@�@�@�@�@�@|_�^�__|,,|�u|,,,|�u|�^!�|]|[|]|[|][]|_.�c | ��_ �@]
�@�@�@�@�@�@�@�@�@�@�@| . ���@ |'|�u|'''|�u|||:ll;|||}{|||}{|||}{|||}{|,�c�c.|__|
�@�@�@�@�@�@�@�@�@�@�@|�P�P�P�P|�u|�P�P||[[|����|]]|[_[_[_[_[_[
�@�@�@�@�@�@�@�@�@�@�^i~~i' l ����l�@.���@���@���@ l�@�@|__| .| .��|�@.|�@l-,
�@�@�@�@�@�@�@,,,,,='~|�@|�@|' |,,=i~~i==========|~~|^^|~ ~'i----i==i,, | 'i
�@�@ �@ �@ �@ |�@l ,==,-'''^^�@ l�@ |. ��. ��. ��. |�@ |��| �@ |����|�@ |~~^i~'i�A
�@�@�@�@�@ ,=i^~~.|�@ |.��.�� |,...,|__|,,|__|,,|__|,,|__|,....,||,,|.|,.....,||,|_|,|.|,....,| �@ |�@|~i
�@�@�@�@ l~| .|�@�@|�@,,,---== �RɁ@�@�@ i�@�@�@�@�R�~~~ �RɁ@�@ ~ �\^=-.i,,,,|,,,|
�@�@�@�@.|..l�@i,-=''~~--,,,�@�@�_�@ �_�@ l�@�@�@�^�@�@�@�^�@�@�@�@�^�@�@__,-=^~
�@�@�@�@|,-''~�@-,,,�Q�@�@~-,,.�@ �_ .�_ |�@.�^�@�@ �^�@�@�Q,,,-~�@ �@�^
�@�@�@�@ ~^''=�A�Q _ ^'- i=''''''^~~~~~~~~~~~~~~~~~~~~^''''''''=i -'^~
�@�@�@�@�@�@�@�@�@�@ ~^^''�R�@�R �@i�@�@ | �@ �� �@i �@/�@ �^�@ �m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�R�@�@�A l�@ |�@ ���@ l�@/ .�^�@�@�^
�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �__�@�Ai �R�@ i�@ /�@�@�@,,=='
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ''==,,,,�Q�Q�Q,,,=='~
�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@�@|�т킱��s �
�@�@�@�@�@�@�@�@�@ �@ �@�@ �@�@�@�@�@�@ �@�@�@�@��\-�\�\�\' �@�@�@
�@�@�@�@�@�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �^�@ �_�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@ �@ �@ �@�@�@�@ �@�@ �@ �i�P�P�P�j �@ �@ �@
�@ �@ �@ �@ �@�@ �@ �@ �@ �� �@�@�@�@�@�@ �i[[[[[[|]]]]]�j �@ �@ ,��
�@�@�@�@�@�@�@�@�@�@�@�@<��>�@ �@ �@ �@ [=|=|=|=|=|=]�@�@�@<��>
�@�@�@�@�@�@�@�@�@�@�@�^�܁_ �@ �@ �@ _|i�i|i�ii�i|i�|_�� �^�܁__
�@�@�@�@�@�@�@�@�@�@�@�n�M�M�m-��-��|ll||llll||lll��||lll��|lll|�P|]�M�M[_|
�@�@�@�@�@�@�@�@�@�@�@|_�^�__|,,|�u|,,,|�u|�^!�|]|[|]|[|][]|_.�c | ��_ �@]
�@�@�@�@�@�@�@�@�@�@�@| . ���@ |'|�u|'''|�u|||:ll;|||}{|||}{|||}{|||}{|,�c�c.|__|
�@�@�@�@�@�@�@�@�@�@�@|�P�P�P�P|�u|�P�P||[[|����|]]|[_[_[_[_[_[
�@�@�@�@�@�@�@�@�@�@�^i~~i' l ����l�@.���@���@���@ l�@�@|__| .| .��|�@.|�@l-,
�@�@�@�@�@�@�@,,,,,='~|�@|�@|' |,,=i~~i==========|~~|^^|~ ~'i----i==i,, | 'i
�@�@ �@ �@ �@ |�@l ,==,-'''^^�@ l�@ |. ��. ��. ��. |�@ |��| �@ |����|�@ |~~^i~'i�A
�@�@�@�@�@ ,=i^~~.|�@ |.��.�� |,...,|__|,,|__|,,|__|,,|__|,....,||,,|.|,.....,||,|_|,|.|,....,| �@ |�@|~i
�@�@�@�@ l~| .|�@�@|�@,,,---== �RɁ@�@�@ i�@�@�@�@�R�~~~ �RɁ@�@ ~ �\^=-.i,,,,|,,,|
�@�@�@�@.|..l�@i,-=''~~--,,,�@�@�_�@ �_�@ l�@�@�@�^�@�@�@�^�@�@�@�@�^�@�@__,-=^~
�@�@�@�@|,-''~�@-,,,�Q�@�@~-,,.�@ �_ .�_ |�@.�^�@�@ �^�@�@�Q,,,-~�@ �@�^
�@�@�@�@ ~^''=�A�Q _ ^'- i=''''''^~~~~~~~~~~~~~~~~~~~~^''''''''=i -'^~
�@�@�@�@�@�@�@�@�@�@ ~^^''�R�@�R �@i�@�@ | �@ �� �@i �@/�@ �^�@ �m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�R�@�@�A l�@ |�@ ���@ l�@/ .�^�@�@�^
�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �__�@�Ai �R�@ i�@ /�@�@�@,,=='
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ''==,,,,�Q�Q�Q,,,=='~
240 �F���J�����������F05/01/02 01:41:56 ID:3bDJ7pSn
���{�̃��{�b�g�͒x��Ă�
�@�@�@�@�@�@�@�@�Q__�@�Q�Q
�@�@�@�@�@, �]''"...�]'''"...........=�O�j�] �_
�@�@�@ �^............`'-..........................---�''-.�
�@�@ ,/...........�R�..........�^...................�.��R..�]��R�
�@�@ !....�..................�^......../.....i..i....i.i.`��..�....�.�_
�@�@.!..i�......�R......./.........../.../...!.i....i.i.!...�Ф.....!l.i..�R
�@�@!..i!...!�......`�/.........../.../...;!.il.!..i..!.!..i`i!.i.i...i|l.i...�i
�@ .!..li`�..�R.......i!........;�V�V;/ !',!...�!l.l!.! li.l.l...!.�;!`i}
�@ l...|l�..`...........!......./// //�@ ,!./�@ l�|�[!�]!l..l| ! ,!
�@ l...ll|Ф............!i..../�V�/'-''7 /�@�@!�@!,r��i |l.�
�@ l...l!.l|Ѓ~�......l../�@�@,r''''��.�/�@�@�@ �@ _i;j .l/
�@ !...i|.!l|lЃ~�O''|!�@�@�@�@ i:;;i�@�@�@�@�@�@�@�@ i�@
�@.!.!.ll..!.l|l|l �܁@�@�@�@�@�P�@�@�@�@�@�@ ��@�@ !
�@i.l..|l....il||l{�����@�@�@�@�@�@�@�@�@�@ �@ '�@�@/
�@l.|.l|..i...!l|li.`''--'�R�@�@�@�@�@�@�@�@,:�]� �@,�
�@!�l|..i...l|'l|....l|l....l|.�R-.��@�@�@�@�@ �'�@�^ `����Q�Q
�@l�@l|...i...l| !|...|l|...|l.....>� `''�]�] ���Q�^�@�@,/�@�@�@ ,,�� �]�
�@l�@.|l...i..l| �!|..!l!-''" |�@`��@�@�@�@�^�@�@ ,/ /�@ �^�@�@�@`�R
�@���@ l|...i..l�^��/�@/�@ ���@ .i�@�@ ,�^�@�@�@,/ // ,/�@�@�@ �@ �@ ޤ
�@!�@ |l...i/�@ /�@/�@ / �^�R,�^��@�@�@,/�@�@�@l�@�@�@�@�@�@�@�@i
�@�@�@l|/�@�@{�@�@�@�@ �L�@�@c�_ �_�@,/�@�@�@ |�@�@ �@ �@ �@ �@ l
�@�@�@'!�@�@�@!�@�@�@�@�@�@�@�@ |�@�@`�L�@�@�@ __|�@�@�@�@�@�@�@�@i!
�@�@�@,'�@�@�@ i�@�@�@�@�@�@�@c l�Q�@�@�@�@�@�@ |�@�@�@�@�@�@�@ l l
�@�@ /�@�@�@�@`ir'�@�@�@�@�@�@ l�@�@�@�@�@�@�@�@l�@�@�@ �@�@ �@ l�@l
�@�@�@�@�@�@�@�@�Q__�@�Q�Q
�@�@�@�@�@, �]''"...�]'''"...........=�O�j�] �_
�@�@�@ �^............`'-..........................---�''-.�
�@�@ ,/...........�R�..........�^...................�.��R..�]��R�
�@�@ !....�..................�^......../.....i..i....i.i.`��..�....�.�_
�@�@.!..i�......�R......./.........../.../...!.i....i.i.!...�Ф.....!l.i..�R
�@�@!..i!...!�......`�/.........../.../...;!.il.!..i..!.!..i`i!.i.i...i|l.i...�i
�@ .!..li`�..�R.......i!........;�V�V;/ !',!...�!l.l!.! li.l.l...!.�;!`i}
�@ l...|l�..`...........!......./// //�@ ,!./�@ l�|�[!�]!l..l| ! ,!
�@ l...ll|Ф............!i..../�V�/'-''7 /�@�@!�@!,r��i |l.�
�@ l...l!.l|Ѓ~�......l../�@�@,r''''��.�/�@�@�@ �@ _i;j .l/
�@ !...i|.!l|lЃ~�O''|!�@�@�@�@ i:;;i�@�@�@�@�@�@�@�@ i�@
�@.!.!.ll..!.l|l|l �܁@�@�@�@�@�P�@�@�@�@�@�@ ��@�@ !
�@i.l..|l....il||l{�����@�@�@�@�@�@�@�@�@�@ �@ '�@�@/
�@l.|.l|..i...!l|li.`''--'�R�@�@�@�@�@�@�@�@,:�]� �@,�
�@!�l|..i...l|'l|....l|l....l|.�R-.��@�@�@�@�@ �'�@�^ `����Q�Q
�@l�@l|...i...l| !|...|l|...|l.....>� `''�]�] ���Q�^�@�@,/�@�@�@ ,,�� �]�
�@l�@.|l...i..l| �!|..!l!-''" |�@`��@�@�@�@�^�@�@ ,/ /�@ �^�@�@�@`�R
�@���@ l|...i..l�^��/�@/�@ ���@ .i�@�@ ,�^�@�@�@,/ // ,/�@�@�@ �@ �@ ޤ
�@!�@ |l...i/�@ /�@/�@ / �^�R,�^��@�@�@,/�@�@�@l�@�@�@�@�@�@�@�@i
�@�@�@l|/�@�@{�@�@�@�@ �L�@�@c�_ �_�@,/�@�@�@ |�@�@ �@ �@ �@ �@ l
�@�@�@'!�@�@�@!�@�@�@�@�@�@�@�@ |�@�@`�L�@�@�@ __|�@�@�@�@�@�@�@�@i!
�@�@�@,'�@�@�@ i�@�@�@�@�@�@�@c l�Q�@�@�@�@�@�@ |�@�@�@�@�@�@�@ l l
�@�@ /�@�@�@�@`ir'�@�@�@�@�@�@ l�@�@�@�@�@�@�@�@l�@�@�@ �@�@ �@ l�@l
241 �F95=101�F05/01/03 22:04:25 ID:e2XMbHoU
��ϒx���Ȃ��Đ\����Ȃ��ł��B�c�Ȃ�āA�C�`�C�`�����Ă��̂�����������Ɓu�������v�Ƃ�
�v���錴���Ȃ̂�������܂���ˁB225����A���肪�Ƃ��������܂��B�e�L�X�g�`���ł͕ϊ��ł���
�̂ł����A�c��ȗʂ̐����}���ǂݏo���Ȃ����̂ŃN�T���Ă܂��B
����܂ł̂��̂͂�����ׂė���Ɋւ�����̂ł�����A�����ɂ͊W�����ł����ǂˁB
����܂łɂ��낢�땷���Ă���������̂��A�ЂƂ܂Ƃ߂ɂ��ď������Ƃ��Ă��̂��x���Ȃ���������
��ł��B�l�̂̉^���́A���ׂĂɂȂ��肪������̂ŁA�C���Â�A�Ƃ������A�Ԃ̖ڂ̂悤��
���݂��Ɋ֘A��������̂ŁA�c��Ȑ����ɂȂ��Ă��܂��܂��B
���Ⴂ�Ȃ̂ɃV���V�����o�Ă��ăC�������Ƃ��S�`���S�`�������̂́A�펯�͈̔͂ł́u�n�c�ʁv��
�߂��Ȃ����̂��u����v�ƌ����Ă�����A�u�v�ȂǂƂ������P�̃��J�������̂����Ă͂₵��
�����肷��̂�ق��Č��Ă�̂��ǂ��ɂ��K�}���ł��Ȃ�������ł���B
227����ɁA�t�H���[���Ă�����Ċ��ӂ��Ă��܂����A������A�u�̃f�^������\���v���Ă̂�
����܂��ˁB
�p��ɂ��ẮA�m���ɍH�w�p��������ƒm��܂���ǂݓ�͖̂{���ɐ\����Ȃ���ł����A
�Ȃ�Ƃ��A�l�̂Ɍ����ɋN�����Ă��邱�Ƃ�m���Ă��炦����A�Ǝv���Ă܂��B
�v���錴���Ȃ̂�������܂���ˁB225����A���肪�Ƃ��������܂��B�e�L�X�g�`���ł͕ϊ��ł���
�̂ł����A�c��ȗʂ̐����}���ǂݏo���Ȃ����̂ŃN�T���Ă܂��B
����܂ł̂��̂͂�����ׂė���Ɋւ�����̂ł�����A�����ɂ͊W�����ł����ǂˁB
����܂łɂ��낢�땷���Ă���������̂��A�ЂƂ܂Ƃ߂ɂ��ď������Ƃ��Ă��̂��x���Ȃ���������
��ł��B�l�̂̉^���́A���ׂĂɂȂ��肪������̂ŁA�C���Â�A�Ƃ������A�Ԃ̖ڂ̂悤��
���݂��Ɋ֘A��������̂ŁA�c��Ȑ����ɂȂ��Ă��܂��܂��B
���Ⴂ�Ȃ̂ɃV���V�����o�Ă��ăC�������Ƃ��S�`���S�`�������̂́A�펯�͈̔͂ł́u�n�c�ʁv��
�߂��Ȃ����̂��u����v�ƌ����Ă�����A�u�v�ȂǂƂ������P�̃��J�������̂����Ă͂₵��
�����肷��̂�ق��Č��Ă�̂��ǂ��ɂ��K�}���ł��Ȃ�������ł���B
227����ɁA�t�H���[���Ă�����Ċ��ӂ��Ă��܂����A������A�u�̃f�^������\���v���Ă̂�
����܂��ˁB
�p��ɂ��ẮA�m���ɍH�w�p��������ƒm��܂���ǂݓ�͖̂{���ɐ\����Ȃ���ł����A
�Ȃ�Ƃ��A�l�̂Ɍ����ɋN�����Ă��邱�Ƃ�m���Ă��炦����A�Ǝv���Ă܂��B
242 �F95=101�F05/01/03 22:07:39 ID:e2XMbHoU
���āA�����ł����A�l�c���̌㎈�́A�܂��ɒn�ʂ��R�������͂Ői�ނ��߂̂��̂ŁA�l�c���̌㎈�́A
�l�̂ł����A�����A�X�l�ƁA���̗��ɂ����镔���������悤�Ȓ����́A���̍\�������͂Ői�ނ��߂�
�K�v�Ȍ`�Ȃ�ł��B
�ŁA���ꂾ���ł͂Ȃ��A�̂̑��̕������A�r�̕t��������O�ɂقڐ����ɓ˂��o���Ă���K�v������܂��B
�l�̂̂悤�ɁA�r�̕t�����̏�ɁA���̂��������ď�������Ă���̂ł͂Ȃ��A�O�Ɂu���ꉺ�����Ă���v
�悤�ȏ�Ԃƍ��킹�ď��߂Ĕ��͐��i���\�ɂȂ��ł���B��̕��ɖ_�𗧂Ăđ��낤�Ƃ��鎞�A
�K���O�ɌX���邱�Ƃ��������Ǝv���܂����A�����n�ʂ��R���ē��锽�͂̍�p�����A���̂̋߂���ʂ���
�Ȃ����A���i�͂Ƃ��ėL���ȁA���������̕����傫���Ȃ��Ă�����(45�x�ȉ�)�ɂ���ɂ́A���̂̕���
�����ɋ߂Â��Ȃ���Ȃ�Ȃ��Ƃ����͔̂���₷���͂��ł��ˁB���̂l�h�s�́A���n���q���C�q���C����
�N���Q���A����O�ɌX���Ă��܂����ˁB
�Ƃ����킯�ŁA�������Ƃ�����������ɊȒP�ɂ܂Ƃ߂Ă��܂��܂������A��{�r�ŁA���̂�������
�܂܂ŁA�����Ƒ������点�悤�Ƃ���ɂ́A�n�ʔ��͂𐄐i�͂ƍl����͎̂~�߂Ȃ���Ȃ�Ȃ��Ƃ���
���ƂȂ�ł���B�c�Ƃ������A�ȂA���́u���i�́v�Ƃ������t�A�T�O���̂��̂������Ă���悤�Ȋ�����
����̂ł����A�ǂȂ����ڂ������A���̓_�ɂ��Ă������ł��傤���H
�l�̂ł����A�����A�X�l�ƁA���̗��ɂ����镔���������悤�Ȓ����́A���̍\�������͂Ői�ނ��߂�
�K�v�Ȍ`�Ȃ�ł��B
�ŁA���ꂾ���ł͂Ȃ��A�̂̑��̕������A�r�̕t��������O�ɂقڐ����ɓ˂��o���Ă���K�v������܂��B
�l�̂̂悤�ɁA�r�̕t�����̏�ɁA���̂��������ď�������Ă���̂ł͂Ȃ��A�O�Ɂu���ꉺ�����Ă���v
�悤�ȏ�Ԃƍ��킹�ď��߂Ĕ��͐��i���\�ɂȂ��ł���B��̕��ɖ_�𗧂Ăđ��낤�Ƃ��鎞�A
�K���O�ɌX���邱�Ƃ��������Ǝv���܂����A�����n�ʂ��R���ē��锽�͂̍�p�����A���̂̋߂���ʂ���
�Ȃ����A���i�͂Ƃ��ėL���ȁA���������̕����傫���Ȃ��Ă�����(45�x�ȉ�)�ɂ���ɂ́A���̂̕���
�����ɋ߂Â��Ȃ���Ȃ�Ȃ��Ƃ����͔̂���₷���͂��ł��ˁB���̂l�h�s�́A���n���q���C�q���C����
�N���Q���A����O�ɌX���Ă��܂����ˁB
�Ƃ����킯�ŁA�������Ƃ�����������ɊȒP�ɂ܂Ƃ߂Ă��܂��܂������A��{�r�ŁA���̂�������
�܂܂ŁA�����Ƒ������点�悤�Ƃ���ɂ́A�n�ʔ��͂𐄐i�͂ƍl����͎̂~�߂Ȃ���Ȃ�Ȃ��Ƃ���
���ƂȂ�ł���B�c�Ƃ������A�ȂA���́u���i�́v�Ƃ������t�A�T�O���̂��̂������Ă���悤�Ȋ�����
����̂ł����A�ǂȂ����ڂ������A���̓_�ɂ��Ă������ł��傤���H
243 �F95=101�F05/01/03 22:10:53 ID:e2XMbHoU
�Q�����̂����悤�Ƃ������f���̓�����������悤�ł����A�n�ʂɒ����Ă�����̑������ɁA
���������O�ɊO���G�q�l��o���A�Ƃ����̂́A����͂Ƃ�ł��Ȃ�����ł����A���{�b�g��
��点���Ƃ���ŁA�σe�R�ȓ����ɂ����Ȃ�܂���B�Q���̓���́A����̌f���Ȃ�
����ƁA�����[�B�l�̓���]�݂����Ȃ��ƂɂȂ��Ă��܂��B
�O�ɁA���̂Q���̓���Ń}�O��������ō��ɐ��i�͂��������邱�Ƃ�����ƃJ�L�R���܂������A
����͐l�̂ł̘b�ŁA���݂̋쓮�����̃��{�b�g�ł́A�Q���̓������点�Ă����ɐ����̗͂�
�������邱�Ƃ͂���܂���B�Q�����_�ł́u���i�͍͂l������A�J���v�̂������ł�����A
�l�̂ł͂��܂����������{�b�g�ł͂��܂������Ȃ��A�Ƃ������Ƃ�����������܂���B
�̖{�����Ă̂́A��������͂͂����茾�킹�Ă��炢�܂��B�@���S�ȃf�^�����ł��B
http://www.namiashi.com/hihoukan/cgi-bin/bbs/basic_b.cgi�@�����̂U�S�R��
�����ĉ������B�B�l�ɂȂ�Ȃ��ƃA�J���ƌ����Ă��ł���B����͑��邱�Ƃ�
�b��ɂȂ��Ă��܂����A�����߂����Ă���ȓ������������ɂ�Ȃ��̂��H�@
������m�ɂ��������Ƃ����C�����͕���Ƃ͂Ȃ��ł����A����Ɋւ��Ă�
�A�E�g�ł��B����Ȃ��͎̂g�����ɂȂ�Ȃ��B
���������O�ɊO���G�q�l��o���A�Ƃ����̂́A����͂Ƃ�ł��Ȃ�����ł����A���{�b�g��
��点���Ƃ���ŁA�σe�R�ȓ����ɂ����Ȃ�܂���B�Q���̓���́A����̌f���Ȃ�
����ƁA�����[�B�l�̓���]�݂����Ȃ��ƂɂȂ��Ă��܂��B
�O�ɁA���̂Q���̓���Ń}�O��������ō��ɐ��i�͂��������邱�Ƃ�����ƃJ�L�R���܂������A
����͐l�̂ł̘b�ŁA���݂̋쓮�����̃��{�b�g�ł́A�Q���̓������点�Ă����ɐ����̗͂�
�������邱�Ƃ͂���܂���B�Q�����_�ł́u���i�͍͂l������A�J���v�̂������ł�����A
�l�̂ł͂��܂����������{�b�g�ł͂��܂������Ȃ��A�Ƃ������Ƃ�����������܂���B
�̖{�����Ă̂́A��������͂͂����茾�킹�Ă��炢�܂��B�@���S�ȃf�^�����ł��B
http://www.namiashi.com/hihoukan/cgi-bin/bbs/basic_b.cgi�@�����̂U�S�R��
�����ĉ������B�B�l�ɂȂ�Ȃ��ƃA�J���ƌ����Ă��ł���B����͑��邱�Ƃ�
�b��ɂȂ��Ă��܂����A�����߂����Ă���ȓ������������ɂ�Ȃ��̂��H�@
������m�ɂ��������Ƃ����C�����͕���Ƃ͂Ȃ��ł����A����Ɋւ��Ă�
�A�E�g�ł��B����Ȃ��͎̂g�����ɂȂ�Ȃ��B
244 �F95=101�F05/01/03 22:15:09 ID:e2XMbHoU
�܂������܂����A���̏��c�L�߂Ȃ邲�m�́A�n���Î~�ɋ߂��قǂ����������Ă���A
���̌㎈�̓��������āu���I�v�ƑM���������ł����A�l�Ԃ̓�{�r�̎p�́A
�n�̑O���̕��Ɏ��Ă���ł���H�@�n�̌㎈�Ǝ��Ă���ȂǂƎv���l�͂܂����
���Ȃ��Ǝv���܂��B�n�̑�����́A�_�_�_�_�b�ƂS�A���������Z�b�g�ŁA�܂�����
���łQ���A���������O�̎��łQ���B���ꂩ�炵�炭���ɕ����܂��B
�l�c���̑���́A���̎��ő傫������Ƃ����C���[�W�����邩������܂��A
����̓l�R���ŁA�n�͒n�ʂ��R��̂͌�뎈�����ŁA�����Ēn�ʂɒ����A�O�̎��́A
�������ێ����邾���ň�ؐ��i�͂͐��ݏo���Ă��Ȃ��̂ł��B
�̃q�����L�́A���̐��i�͂ݏo���u��뎈�v�A�l�Ԃ̋r�Ƃ͌`���Ⴄ
�u��뎈�v�����đM���������ŁA���ɂ͐�ɗ����ł��Ȃ��u������(��܂�����)�v
�ł��B�n�̌㎈�̏�ɂ͉��������B�l�ԂȂ�P�c�̏�ɔw���������āA���̏�Ɍ���
�����ė��r���u���������Ă��邵�A���̌��̏�ɓ��������ł����A�n�̃P�c�̏�ɂ�
�����Ȃ��B�����Đl�ԂɎ��Ă���̂͑O�̎��̕��B�܂�A�S�R���Ă����Ȃ����̂�
���čl�������Ƃ������ƂȂ̂ł��B
�܂��w���x�Ƃ����̂́A���ʁA�u�����Ȃ����v�ł���͂��ł��B�u�����v�N���}�̗���
�̎��́A����͉����ł����A���Ȃ��Ƃ��ԑ̂̒��ł̈ʒu��p�x�A�`�͕ω����܂���B
�������A�Q���̎��́A�r�̕t�����̈ʒu�����͕ς�Ȃ����̂́A�p�x���`���ω����܂��B
���n�����r�����ƌĂׂ�̂͋r���n�ʂƐ����ɂȂ�����u�����ŁA���̈�u�̊ԂƂ���
�̂́A��������̋r����납��O�ɏo�Ă���ɂ͒Z�������܂��B�܂�A�Q���Ȃǂ�
�������̂́A�u����v�Ɋւ��Ă͈�ؐ��藧���Ȃ��w�������x�Ȃ킯�ł��B
�싅�̃o�b�g��S���t�̃N���u���X�C���O����G��̂��Ђ˂�Ƃ������ɁA�w�c���x
�Ƃ��čl����̂Ȃ画��܂����A���̏c���͒n�ʂɒ��ړ˂������Ă���c���Ȃǂł͂Ȃ��A
�n�ʂɒ�������{�̋r�̕t�����Q���Q�_�Ŏx�����Ă��鎲���Ƃ������ƂɂȂ�܂��B
�u�Q�_�x���v�Ƃ����̂��{���ł��傤�B
���̌㎈�̓��������āu���I�v�ƑM���������ł����A�l�Ԃ̓�{�r�̎p�́A
�n�̑O���̕��Ɏ��Ă���ł���H�@�n�̌㎈�Ǝ��Ă���ȂǂƎv���l�͂܂����
���Ȃ��Ǝv���܂��B�n�̑�����́A�_�_�_�_�b�ƂS�A���������Z�b�g�ŁA�܂�����
���łQ���A���������O�̎��łQ���B���ꂩ�炵�炭���ɕ����܂��B
�l�c���̑���́A���̎��ő傫������Ƃ����C���[�W�����邩������܂��A
����̓l�R���ŁA�n�͒n�ʂ��R��̂͌�뎈�����ŁA�����Ēn�ʂɒ����A�O�̎��́A
�������ێ����邾���ň�ؐ��i�͂͐��ݏo���Ă��Ȃ��̂ł��B
�̃q�����L�́A���̐��i�͂ݏo���u��뎈�v�A�l�Ԃ̋r�Ƃ͌`���Ⴄ
�u��뎈�v�����đM���������ŁA���ɂ͐�ɗ����ł��Ȃ��u������(��܂�����)�v
�ł��B�n�̌㎈�̏�ɂ͉��������B�l�ԂȂ�P�c�̏�ɔw���������āA���̏�Ɍ���
�����ė��r���u���������Ă��邵�A���̌��̏�ɓ��������ł����A�n�̃P�c�̏�ɂ�
�����Ȃ��B�����Đl�ԂɎ��Ă���̂͑O�̎��̕��B�܂�A�S�R���Ă����Ȃ����̂�
���čl�������Ƃ������ƂȂ̂ł��B
�܂��w���x�Ƃ����̂́A���ʁA�u�����Ȃ����v�ł���͂��ł��B�u�����v�N���}�̗���
�̎��́A����͉����ł����A���Ȃ��Ƃ��ԑ̂̒��ł̈ʒu��p�x�A�`�͕ω����܂���B
�������A�Q���̎��́A�r�̕t�����̈ʒu�����͕ς�Ȃ����̂́A�p�x���`���ω����܂��B
���n�����r�����ƌĂׂ�̂͋r���n�ʂƐ����ɂȂ�����u�����ŁA���̈�u�̊ԂƂ���
�̂́A��������̋r����납��O�ɏo�Ă���ɂ͒Z�������܂��B�܂�A�Q���Ȃǂ�
�������̂́A�u����v�Ɋւ��Ă͈�ؐ��藧���Ȃ��w�������x�Ȃ킯�ł��B
�싅�̃o�b�g��S���t�̃N���u���X�C���O����G��̂��Ђ˂�Ƃ������ɁA�w�c���x
�Ƃ��čl����̂Ȃ画��܂����A���̏c���͒n�ʂɒ��ړ˂������Ă���c���Ȃǂł͂Ȃ��A
�n�ʂɒ�������{�̋r�̕t�����Q���Q�_�Ŏx�����Ă��鎲���Ƃ������ƂɂȂ�܂��B
�u�Q�_�x���v�Ƃ����̂��{���ł��傤�B
245 �F���J�����������F05/01/03 23:56:31 ID:sqG1s7/N
������ă��X�����Ă݂邼
���펯�͈̔͂ł́u�n�c�ʁv�ɉ߂��Ȃ����̂��u����v�ƌ����Ă�����
����ɂ��Ă͂��̃X����>>60-61��ǂ߂���Ȃ�ɗ��R�����邱�Ƃ��킩��͂�
�����̍\�������͂Ői�ނ��߂ɕK�v�Ȍ`�Ȃ�ł��B
�Ӗ����킩���B
�c�ǂ����u���́v�̈Ӗ������̔F���ƈႤ�炵��
�����i�͂Ƃ��ėL���ȁA���������̕����傫���Ȃ��Ă�����(45�x�ȉ�)�ɂ���ɂ�
45�x���N���オ���Ă���ƂȂ��u���i�͂Ƃ��ėL���v�łȂ��̂��킩���
�ڒn������d�S�Ɍ����ė�F��������Ȃ牔������̌X���Ƃɉ�����Fsin�Ƃ̐����͂�
������͂��ł���͑����ꏭ�Ȃ���u���i�͂Ƃ��ėL���v�ɂ͈Ⴂ�Ȃ�����H
�c�ǂ����u���i�́v�̈Ӗ������̔F���ƈႤ�炵��
�����́u���i�́v�Ƃ������t�A�T�O���̂��̂������Ă���悤�Ȋ���������̂ł���
���̌��t�A�T�O�A���H�}�W�킩���B�ڂ��������ς݂Ȃ烌�X�Ԃ������Ă���
���͂��́u�v���Ă͕̂��������Ɩ������炻��ɂ��ăR�����g�͔����邪
�����̏��c�L�߂Ȃ邲�m
���̂ЂƍH�w�̐l����Ȃ��C��������B
���펯�͈̔͂ł́u�n�c�ʁv�ɉ߂��Ȃ����̂��u����v�ƌ����Ă�����
����ɂ��Ă͂��̃X����>>60-61��ǂ߂���Ȃ�ɗ��R�����邱�Ƃ��킩��͂�
�����̍\�������͂Ői�ނ��߂ɕK�v�Ȍ`�Ȃ�ł��B
�Ӗ����킩���B
�c�ǂ����u���́v�̈Ӗ������̔F���ƈႤ�炵��
�����i�͂Ƃ��ėL���ȁA���������̕����傫���Ȃ��Ă�����(45�x�ȉ�)�ɂ���ɂ�
45�x���N���オ���Ă���ƂȂ��u���i�͂Ƃ��ėL���v�łȂ��̂��킩���
�ڒn������d�S�Ɍ����ė�F��������Ȃ牔������̌X���Ƃɉ�����Fsin�Ƃ̐����͂�
������͂��ł���͑����ꏭ�Ȃ���u���i�͂Ƃ��ėL���v�ɂ͈Ⴂ�Ȃ�����H
�c�ǂ����u���i�́v�̈Ӗ������̔F���ƈႤ�炵��
�����́u���i�́v�Ƃ������t�A�T�O���̂��̂������Ă���悤�Ȋ���������̂ł���
���̌��t�A�T�O�A���H�}�W�킩���B�ڂ��������ς݂Ȃ烌�X�Ԃ������Ă���
���͂��́u�v���Ă͕̂��������Ɩ������炻��ɂ��ăR�����g�͔����邪
�����̏��c�L�߂Ȃ邲�m
���̂ЂƍH�w�̐l����Ȃ��C��������B
246 �F���J�����������F05/01/04 01:06:44 ID:hPXVhO8o
��������������������������������������������������������������������������������������
���F�F�F�F�F�G�F�F�F�F�@�@�@�@�@�@�@�@�@�@�R�@�@�@�@�@�@�@Ɂ@�@��
���F�F�F�F�F�F�F�F�F�@�@�@�@�@�@�@�@�@�@�@�@�P-�@�@�@-�P .�@�@��
���F�F�F�F�F�F�F�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�P�P�@�@�@�@ �@��
���F�F�F�F�F�F�@�@�@�@�@�@�@�@�@�@�@�Ѓ~�~�~�~�~�@�@�@�~�~�~�~�~��
���F�F�F�F�@�@�@�@������������������������������������
���@�����P�P�@�@�@�@�@���^�P���_�@/�@�@���Y�P���R�@�@��
���R�@�@�@�@�@�@�@�@�܁܁_�R������Ɂ@/���@��������> .��
���R�@�@�@�@�@�@�@�@�@�@�Y�@�@�P�P�P�P�@���@���@�_�����^
���@�_.�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@ ���@�@�@ �@���@�@�@�@�@�@�@�@�@�^�P�P�P�P�P�P�P�P�P�P�P�P�P�P
���@���@�@..�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ���@�@�@�@���@�@ �@�@ �@�@�^
���@.���@�@.�@.�@�@�@�@�@�@�@�@�@�@�@�@���^�@�@�@�@�@�R�@�@�@�@/�@�@�@ �@�@���@�@�@���O��z�[���������̔n������
���@�@���@�@�@�@�@�@�@�@�@�@�@�@�^�@�@ �_�܁_�@�@�m�_�@.�@/�@�@�@�@�@�@�@ �_
���_�^�R�@�@ �@�@�@�@�@�@�@�^�@�@�@�@�@�@�@�@�@�@�@�@�@�_. /�@�@�@�@�@ �@�@�@�@�_
���@�@ ���_�@�@�@ �@���@�@���@�������P�P�P����).�@/�@�@�@�@�@�@�@�@�@�@�@�P�P�P�P�P�P�P�P�P�P�P�P�P�P
���@�@�@���@�R�@�@�@�@���@ �_�@�@�_�{�{�{�{�{�{/�@/
���@�@�@.���@�@�@�@�@�@�@�_�@�@�@�@�@�_��������/�@�@/
���@�@�@/�@�@�@�_�@�@�@�@�@�@�@�@�@�@�i���������m�@�@/
���@�@/���@�@�@�@�_�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@.�@/�_
���@/�@���@�@�@�@�@�@�_�@�@�@�@�@�@<���������@/���_
���m�@�@���@�@�@�@�@�@�@�@�_�@�@�@�@�@�@�@�@�@�@�@/�@���@�_
���@�@�@���@�@�@�@�@�@�@�@�@�@�_�@�@�@�@�@�@�@�@/�@�@���@�@�_
���@�@�@���@�@�@�@�@�@�@�@�@�@�@�@�P�P�P�P�@�@�@�@���@�@�@�P�_����
������������������������������������������������������������������������������������
���F�F�F�F�F�G�F�F�F�F�@�@�@�@�@�@�@�@�@�@�R�@�@�@�@�@�@�@Ɂ@�@��
���F�F�F�F�F�F�F�F�F�@�@�@�@�@�@�@�@�@�@�@�@�P-�@�@�@-�P .�@�@��
���F�F�F�F�F�F�F�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�P�P�@�@�@�@ �@��
���F�F�F�F�F�F�@�@�@�@�@�@�@�@�@�@�@�Ѓ~�~�~�~�~�@�@�@�~�~�~�~�~��
���F�F�F�F�@�@�@�@������������������������������������
���@�����P�P�@�@�@�@�@���^�P���_�@/�@�@���Y�P���R�@�@��
���R�@�@�@�@�@�@�@�@�܁܁_�R������Ɂ@/���@��������> .��
���R�@�@�@�@�@�@�@�@�@�@�Y�@�@�P�P�P�P�@���@���@�_�����^
���@�_.�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@ ���@�@�@ �@���@�@�@�@�@�@�@�@�@�^�P�P�P�P�P�P�P�P�P�P�P�P�P�P
���@���@�@..�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ���@�@�@�@���@�@ �@�@ �@�@�^
���@.���@�@.�@.�@�@�@�@�@�@�@�@�@�@�@�@���^�@�@�@�@�@�R�@�@�@�@/�@�@�@ �@�@���@�@�@���O��z�[���������̔n������
���@�@���@�@�@�@�@�@�@�@�@�@�@�@�^�@�@ �_�܁_�@�@�m�_�@.�@/�@�@�@�@�@�@�@ �_
���_�^�R�@�@ �@�@�@�@�@�@�@�^�@�@�@�@�@�@�@�@�@�@�@�@�@�_. /�@�@�@�@�@ �@�@�@�@�_
���@�@ ���_�@�@�@ �@���@�@���@�������P�P�P����).�@/�@�@�@�@�@�@�@�@�@�@�@�P�P�P�P�P�P�P�P�P�P�P�P�P�P
���@�@�@���@�R�@�@�@�@���@ �_�@�@�_�{�{�{�{�{�{/�@/
���@�@�@.���@�@�@�@�@�@�@�_�@�@�@�@�@�_��������/�@�@/
���@�@�@/�@�@�@�_�@�@�@�@�@�@�@�@�@�@�i���������m�@�@/
���@�@/���@�@�@�@�_�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@.�@/�_
���@/�@���@�@�@�@�@�@�_�@�@�@�@�@�@<���������@/���_
���m�@�@���@�@�@�@�@�@�@�@�_�@�@�@�@�@�@�@�@�@�@�@/�@���@�_
���@�@�@���@�@�@�@�@�@�@�@�@�@�_�@�@�@�@�@�@�@�@/�@�@���@�@�_
���@�@�@���@�@�@�@�@�@�@�@�@�@�@�@�P�P�P�P�@�@�@�@���@�@�@�P�_����
������������������������������������������������������������������������������������
247 �F���J�����������F05/01/04 11:04:26 ID:CFJwe9ch
�Q���ő��s�\�ȓ����Ƃ̓q�g�ƃ_�`���E���v�������Ԃ�
95=101���Ƃ��Ă̓_�`���E�̑��s��
���̃e�R�ɂ����̂ɓ��Ă͂܂�ƍl���邱�Ƃ͉\�H
���s�Ƃ������ƂŌ����q�g�ȏ�ɒB�҂ȃ_�`���E������
��荂�����ȑ��s�V�[�P���X�́A�_�`���E�Ɋw�Ԃׂ����Ǝv������
���g�����Ȃ�ˁB
�ŁA�����Ƃ���������͎v����n�ʔ��͂Ői��ł���悤�Ɍ�����
�q�g���X�^�[�g���͒n�ʔ��͂𐄐i�ɂ��Ă�悤�Ɏv����ȁB
������Ƃ��ǂ���H
95=101���Ƃ��Ă̓_�`���E�̑��s��
���̃e�R�ɂ����̂ɓ��Ă͂܂�ƍl���邱�Ƃ͉\�H
���s�Ƃ������ƂŌ����q�g�ȏ�ɒB�҂ȃ_�`���E������
��荂�����ȑ��s�V�[�P���X�́A�_�`���E�Ɋw�Ԃׂ����Ǝv������
���g�����Ȃ�ˁB
�ŁA�����Ƃ���������͎v����n�ʔ��͂Ői��ł���悤�Ɍ�����
�q�g���X�^�[�g���͒n�ʔ��͂𐄐i�ɂ��Ă�悤�Ɏv����ȁB
������Ƃ��ǂ���H
248 �F���J�����������F05/01/04 11:17:31 ID:1+umzHqV
���łȂ�]�T�œ��s�ł��邩��
�n��œ��s��������̂���������
���������m�`�r�c�`�ɗ���Ō��ł��������Ă݂�Ƃ����ˁB
�͂��߂Č��ő������q���[�}�m�C�h�̏̍������炦�邵�B
�F���ł̊����ɂ͂����Ă������B
�n��œ��s��������̂���������
���������m�`�r�c�`�ɗ���Ō��ł��������Ă݂�Ƃ����ˁB
�͂��߂Č��ő������q���[�}�m�C�h�̏̍������炦�邵�B
�F���ł̊����ɂ͂����Ă������B
249 �F���J�����������F05/01/04 20:45:14 ID:t+Nx+I/Y
>>258
�����ƁA����Ȃ��ǂˁB
>�@�Ȃ��A�l�Ԃ̑���́A���x�ɉ����Ĉ���̎����i���s�����j��0.2�`0.4�b�A
>�����������Ă��鎞�ԁi���ԁj��0.05�`0.1�b�ɕω�����B
>�@�����ASIMO�̑��s������0.36�b�A���Ԃ�0.05�b�ŁA�l�̃W���M���O�Ɠ����ł���B
ttp://www.honda.co.jp/news/2004/c041215-asimo.html
����ȑ����ASIMO�̃n�[�h�E�F�A�ł����A�l�Ԃ̑��s�����A���Ԃɋ߂����̂��o���Ă�킯�B
����ȏ�́A�n�[�h����Ȃ��Đ���ʂ̊v�V��}��Ȃ��Ƒ債�Đi�����Ȃ��C������B
�܂��A����Honda�͉e�ł͂����������V�Z�p�̌��������ĂāA�܂��u���̃��{�b�g�����҂�
���܂ʼn�������Ă��H�v���Ă��ƂɂȂ肻���ȋC������ȁB
���{�b�g�����҂��ē��ł��z�������B
�����ƁA����Ȃ��ǂˁB
>�@�Ȃ��A�l�Ԃ̑���́A���x�ɉ����Ĉ���̎����i���s�����j��0.2�`0.4�b�A
>�����������Ă��鎞�ԁi���ԁj��0.05�`0.1�b�ɕω�����B
>�@�����ASIMO�̑��s������0.36�b�A���Ԃ�0.05�b�ŁA�l�̃W���M���O�Ɠ����ł���B
ttp://www.honda.co.jp/news/2004/c041215-asimo.html
����ȑ����ASIMO�̃n�[�h�E�F�A�ł����A�l�Ԃ̑��s�����A���Ԃɋ߂����̂��o���Ă�킯�B
����ȏ�́A�n�[�h����Ȃ��Đ���ʂ̊v�V��}��Ȃ��Ƒ債�Đi�����Ȃ��C������B
�܂��A����Honda�͉e�ł͂����������V�Z�p�̌��������ĂāA�܂��u���̃��{�b�g�����҂�
���܂ʼn�������Ă��H�v���Ă��ƂɂȂ肻���ȋC������ȁB
���{�b�g�����҂��ē��ł��z�������B
250 �F���J�����������F05/01/04 23:58:58 ID:rFtCjPzH
>247
�ȂT�����ƌ����Ă邯��
�u���̃e�R�v���ĉ��H
�ȂT�����ƌ����Ă邯��
�u���̃e�R�v���ĉ��H
251 �F���J�����������F05/01/05 16:36:34 ID:x36ybVfj
>250
�ߋ����X�̂X�T�`�P�X�O�̊Ԃ��炢��
95=101���������B
�ߋ����X�̂X�T�`�P�X�O�̊Ԃ��炢��
95=101���������B
252 �F���J�����������F05/01/05 22:37:04 ID:dCOg3Wpi
>247
�_�`���E���{�ǂ��B
�_�`���E���{�ǂ��B
253 �F���J�����������F05/01/05 23:24:23 ID:BCEx0xSv
>251
�ǂ��ǂ悭�킩���B����L�{��
�ǂ��ǂ悭�킩���B����L�{��
254 �F���J�e���������F05/01/06 00:24:49 ID:fESgJvlR
�y���M�����Q�����s�����
255 �F���J�����������F05/01/06 01:19:41 ID:1woVeY2q
�Ƃ肠����95��ǂ�ʼn�������݂Ă݂邼
>>>92 ���`��A�����v�����Ⴄ���B�z�b�s���O�̏ꍇ�ɂ́A����̕����Ɨ͂̍�p����
>��v���Ă����ɁA���̍�p���̏�ɏd�S������킯�ŁA���䂵�₷����ˁB
�����Ō����z�b�s���O���u��ʒu�ł̒P�r�ɂ�钵��̌J��Ԃ��v���Ɖ��肵��
�E�^���͉�������
�E���Əd�S����������������
�E�����͂���������
�ƁA3�̃��C�������낤�̂Řb���ȒP�ɂȂ�A�Ƃ����Ӗ����Ɨ������邼�B
>�u����炵������v�̏ꍇ�ɂ́A���E�ɊԊu�̂���Q�_(�Ҋ߂̐ڍ���)�Ŏx����ꂽ
>���_�̐^�����ɏc�̖_�𗧂ĂāA���̖_�ɏd�S�����h���ɂȂ��Ă�����Ă��ƂɂȂ�B
>�ہ�����̏c�_�ɑ傫�ȁ�(�d�S)�����Ă��āA���_�̗��[���Ҋ߂̐ڍ����A�����
>�x�����Ă���Ǝv���Ă���B
���Ԃ�
�@ ��
�@ �b
|�P�P|
|�@�@�@|
���������\���̘b�����Ă�낤�B
>�z�b�s���O�ł͋��߂铮��̕����͐����ɐ^�ゾ����ǁA����炵������ł́A���߂铮���
>�����͐����ŁA���R�A�d�S�͗͂̍�p����ɂ͂Ȃ��B
�@ �� ��
A�@|�@
|�P�P�_
|�@�@�@
B�@�@�@
�n�ʂɑ�B�����Ă��ďd�S���E�����ɐi�܂������̂����A
�\����u�́v��B����A�ɂނ��ė����(���̗�����u��p���v�ƌ���)�B
�d�S��BA�̉�����ɂȂ����߁u�d�S�͗͂̍�p����ɂ͂Ȃ��v
�Ƃ������������Ƃ����������̂��H
>�ڒn���ɂ́ۂ̉��_�̗��[�̂ǂ��炩�Е��������݂ɒn�ʂ���̔��͂��Ďx����Ɠ�����
>���������֑S�̂������߂̓���������Ȃ���Ȃ�Ȃ��B
>����Ȃ��Ƃ��l���Ă��������ĕς��Ȃ��Ǝv�����H
���߂�A�������Ă�̂������ς�킩���B���܂���ق�Ƃɗ����ł��Ă�̂Ȃ�������Ă���B
>>>92 ���`��A�����v�����Ⴄ���B�z�b�s���O�̏ꍇ�ɂ́A����̕����Ɨ͂̍�p����
>��v���Ă����ɁA���̍�p���̏�ɏd�S������킯�ŁA���䂵�₷����ˁB
�����Ō����z�b�s���O���u��ʒu�ł̒P�r�ɂ�钵��̌J��Ԃ��v���Ɖ��肵��
�E�^���͉�������
�E���Əd�S����������������
�E�����͂���������
�ƁA3�̃��C�������낤�̂Řb���ȒP�ɂȂ�A�Ƃ����Ӗ����Ɨ������邼�B
>�u����炵������v�̏ꍇ�ɂ́A���E�ɊԊu�̂���Q�_(�Ҋ߂̐ڍ���)�Ŏx����ꂽ
>���_�̐^�����ɏc�̖_�𗧂ĂāA���̖_�ɏd�S�����h���ɂȂ��Ă�����Ă��ƂɂȂ�B
>�ہ�����̏c�_�ɑ傫�ȁ�(�d�S)�����Ă��āA���_�̗��[���Ҋ߂̐ڍ����A�����
>�x�����Ă���Ǝv���Ă���B
���Ԃ�
�@ ��
�@ �b
|�P�P|
|�@�@�@|
���������\���̘b�����Ă�낤�B
>�z�b�s���O�ł͋��߂铮��̕����͐����ɐ^�ゾ����ǁA����炵������ł́A���߂铮���
>�����͐����ŁA���R�A�d�S�͗͂̍�p����ɂ͂Ȃ��B
�@ �� ��
A�@|�@
|�P�P�_
|�@�@�@
B�@�@�@
�n�ʂɑ�B�����Ă��ďd�S���E�����ɐi�܂������̂����A
�\����u�́v��B����A�ɂނ��ė����(���̗�����u��p���v�ƌ���)�B
�d�S��BA�̉�����ɂȂ����߁u�d�S�͗͂̍�p����ɂ͂Ȃ��v
�Ƃ������������Ƃ����������̂��H
>�ڒn���ɂ́ۂ̉��_�̗��[�̂ǂ��炩�Е��������݂ɒn�ʂ���̔��͂��Ďx����Ɠ�����
>���������֑S�̂������߂̓���������Ȃ���Ȃ�Ȃ��B
>����Ȃ��Ƃ��l���Ă��������ĕς��Ȃ��Ǝv�����H
���߂�A�������Ă�̂������ς�킩���B���܂���ق�Ƃɗ����ł��Ă�̂Ȃ�������Ă���B
256 �F95=101�F05/01/07 04:37:17 ID:yXiSuPKm
���傤��247����������̎��̘b���o�܂�������A245�������Ă��ꂽ�u���͂Ői�ނ��Ƃ̂ł���
�r�̌`�v�ɂ��āA�c�_�`���E�͓�{�r�ŗ����ĕ����A�l�Ԃ��͂邩�ɑ�������̂ł����A�����
�u���ɐ��i�͂�����e�R�̃��J�j�Y���v���`������Ă���̂ł͂Ȃ��A�u���͐��i�v�ł��B
������̎��́A���̂̐^����j���L�b�Ƃ܂������Ɏ����o�Ă���悤�Ɍ����܂��B���̂̐^����
�r�������Ă���l�́AMIT�́A���n���s�����R�s�����R����N���Q�Ƃ��Ȃ��悤�Ɍ�����(MIT�N���Q�̋r
�Ƃ͌����ڂɕG�̋Ȃ�������t)�̂ł����A�_�`���E�̍��i�́A���̂̈�Ԍ��̌Ҋ߂���A���̂�
�^������܂Ńq�g�ł����u��ڍ��v���o�Ă��āA�������牺�փX�l���L�тĂ����܂��B��ڂ���G��
������Ƃ���܂ł��t�T�t�T�̉H�тɉB��Ă���̂Ŏ������̂̐^����˂��o���Ă���悤�Ɍ�����
�킯�ł��B
�t�ɋȂ���G�̂悤�ȕ����̓q�g�̑���ɂ�����킯�ŁA��{�r�ŗ����đ����s����_�`���E�̋r�́A
�l�c�������̌㎈�Ɠ����`�����Ă���̂��킩��܂��B���̌`���u���͐��i�v�ɕK�{�ł���Ƃ����̂́A
�u�K�v�ȃ��X�v��������A�Ƃ������A�s�v�Ȕ��͂�g�̈ȊO�̕����֓������Ă��܂���Ƃ����_��
����܂��B
�r�̌`�v�ɂ��āA�c�_�`���E�͓�{�r�ŗ����ĕ����A�l�Ԃ��͂邩�ɑ�������̂ł����A�����
�u���ɐ��i�͂�����e�R�̃��J�j�Y���v���`������Ă���̂ł͂Ȃ��A�u���͐��i�v�ł��B
������̎��́A���̂̐^����j���L�b�Ƃ܂������Ɏ����o�Ă���悤�Ɍ����܂��B���̂̐^����
�r�������Ă���l�́AMIT�́A���n���s�����R�s�����R����N���Q�Ƃ��Ȃ��悤�Ɍ�����(MIT�N���Q�̋r
�Ƃ͌����ڂɕG�̋Ȃ�������t)�̂ł����A�_�`���E�̍��i�́A���̂̈�Ԍ��̌Ҋ߂���A���̂�
�^������܂Ńq�g�ł����u��ڍ��v���o�Ă��āA�������牺�փX�l���L�тĂ����܂��B��ڂ���G��
������Ƃ���܂ł��t�T�t�T�̉H�тɉB��Ă���̂Ŏ������̂̐^����˂��o���Ă���悤�Ɍ�����
�킯�ł��B
�t�ɋȂ���G�̂悤�ȕ����̓q�g�̑���ɂ�����킯�ŁA��{�r�ŗ����đ����s����_�`���E�̋r�́A
�l�c�������̌㎈�Ɠ����`�����Ă���̂��킩��܂��B���̌`���u���͐��i�v�ɕK�{�ł���Ƃ����̂́A
�u�K�v�ȃ��X�v��������A�Ƃ������A�s�v�Ȕ��͂�g�̈ȊO�̕����֓������Ă��܂���Ƃ����_��
����܂��B
257 �F95=101�F05/01/07 04:57:04 ID:yXiSuPKm
�u�s�v�Ȕ��́v�Ƃ����̂́A���̂����ɂЂ˂���Ƃ��A������ɂ�����Ƃ��A�R�P������Ƃ��́A�v�����
���肵�đO�ɐi�ނ��߂̗͈ȊO�͂��ׂĕs�v�Ƃ������ƂɂȂ�܂��B
255����̍Ō�̐}�ł́A�u�́v���n�ʂɂ��Ă��鑫B����Ҋ߂̐ڍ���A�ւƁu�����v�ɏ�Ɍ������Ă���
�Ƃ������Ƃł�(���́w�����͐����x�Ə����Ă��ł����ǂˁB)���A�����̗͂Ƃ����̂͏d�͂̔���p�A�܂�
�̏d���x����͂Ƃ��������ŁA���i�͂邽�߂̓�����͂����������̂ŁA�����P�킩���ł��傤�B
���͂őO�ɐi�����Ƃ��鎞�ɁA�ǂ�ȕ��ɗ͂����邩�Ƃ����A�펯�I�ɂ͑���O������ցA�قڐ�����
�������͂������ł����A����ɏd�͂���������w���́x���A�n�ʂɓ`���A���̐����̕����ɔ��͂�
���܂�܂��B���̔��͂Ɂu�s�v�ȗ́v���܂܂�Ă���킯�ł��B�}�́A�c�����ł��ȁB����ς�B����R��
�`���Ȃ��B�������ȁB
�܂�A���i�͂�ׂ��n�ʂɗ͂������ē������͂́A�d�S�̂���������ڒn�������琂���ɐ^����������Ƃ�
��ɂȂ��킯�ŁA�ڒn���Ă��鑫������O�Ɍ����ăn�l�Ԃ��Ă���ɉ߂��Ȃ���ł���B
���i�͂Ƃ����̂́A�{���͂��̍�p�����d�S��ʂ��Ă��Ȃ���Ȃ�Ȃ��킯�ŁA�l�c���̏ꍇ�ɂ́A�ڒn������
�O�ߏ�ɓ��̂�����܂����炻��ł悢�̂ł����A�������Ă���l�̂ł͐[���O�X���Ȃ�����A�n�ʂ��R����
���͂��A���̂ɂ���d�S�Ɍ��������Ƃ͂Ȃ��킯�ł��B�X�i���`�A�����Q�������s�ł́A�n�ʂ������^�R�邵��
���͂͐��i�͂ɂȂ蓾�Ȃ��킯�ł��B
���肵�đO�ɐi�ނ��߂̗͈ȊO�͂��ׂĕs�v�Ƃ������ƂɂȂ�܂��B
255����̍Ō�̐}�ł́A�u�́v���n�ʂɂ��Ă��鑫B����Ҋ߂̐ڍ���A�ւƁu�����v�ɏ�Ɍ������Ă���
�Ƃ������Ƃł�(���́w�����͐����x�Ə����Ă��ł����ǂˁB)���A�����̗͂Ƃ����̂͏d�͂̔���p�A�܂�
�̏d���x����͂Ƃ��������ŁA���i�͂邽�߂̓�����͂����������̂ŁA�����P�킩���ł��傤�B
���͂őO�ɐi�����Ƃ��鎞�ɁA�ǂ�ȕ��ɗ͂����邩�Ƃ����A�펯�I�ɂ͑���O������ցA�قڐ�����
�������͂������ł����A����ɏd�͂���������w���́x���A�n�ʂɓ`���A���̐����̕����ɔ��͂�
���܂�܂��B���̔��͂Ɂu�s�v�ȗ́v���܂܂�Ă���킯�ł��B�}�́A�c�����ł��ȁB����ς�B����R��
�`���Ȃ��B�������ȁB
�܂�A���i�͂�ׂ��n�ʂɗ͂������ē������͂́A�d�S�̂���������ڒn�������琂���ɐ^����������Ƃ�
��ɂȂ��킯�ŁA�ڒn���Ă��鑫������O�Ɍ����ăn�l�Ԃ��Ă���ɉ߂��Ȃ���ł���B
���i�͂Ƃ����̂́A�{���͂��̍�p�����d�S��ʂ��Ă��Ȃ���Ȃ�Ȃ��킯�ŁA�l�c���̏ꍇ�ɂ́A�ڒn������
�O�ߏ�ɓ��̂�����܂����炻��ł悢�̂ł����A�������Ă���l�̂ł͐[���O�X���Ȃ�����A�n�ʂ��R����
���͂��A���̂ɂ���d�S�Ɍ��������Ƃ͂Ȃ��킯�ł��B�X�i���`�A�����Q�������s�ł́A�n�ʂ������^�R�邵��
���͂͐��i�͂ɂȂ蓾�Ȃ��킯�ł��B
258 �F95=101�F05/01/07 04:59:29 ID:yXiSuPKm
�������A���͂����i�͂ɂȂ蓾�Ȃ��̂ɁA�l�̂�ASIMO�͑O�ɐi��ł��܂��B
���i�͂������Ȃ�A�����{�̂�i�܂��Ă���̂��H�@��(foot)��O������֓������͂�
�����ƁA���͑O�Ƀn�l�Ԃ���遨�O�Ƀn�l�Ԃ���Ă��鑫������Ɍ��֓���������
���锽���ŃX�l����オ�O�ɐi�ށB����͎����Ԃ̃^�C���Ɠ������N�c�ŁA�͂��o���Ă���
�����Ɛڒn���Ă��镔���Ƃ̔��Ε����̗́w�Y���x�ɂ���Đi��ł���킯�ł��B
�����ԂƓ����Ȃ炻��ł�����Ȃ����H�@�Ƃ��v���܂����A�^�C���ƂQ�������s�ł�
�������S���Ⴂ�܂��B
���i�͂������Ȃ�A�����{�̂�i�܂��Ă���̂��H�@��(foot)��O������֓������͂�
�����ƁA���͑O�Ƀn�l�Ԃ���遨�O�Ƀn�l�Ԃ���Ă��鑫������Ɍ��֓���������
���锽���ŃX�l����オ�O�ɐi�ށB����͎����Ԃ̃^�C���Ɠ������N�c�ŁA�͂��o���Ă���
�����Ɛڒn���Ă��镔���Ƃ̔��Ε����̗́w�Y���x�ɂ���Đi��ł���킯�ł��B
�����ԂƓ����Ȃ炻��ł�����Ȃ����H�@�Ƃ��v���܂����A�^�C���ƂQ�������s�ł�
�������S���Ⴂ�܂��B
259 �F95=101�F05/01/07 07:19:28 ID:yXiSuPKm
�w�Y���x�́A�i�}�g�̐l�Ԃł͕G�̌̏�������A�F�A����тȂǂ̕������N�����̂ł����A
����́A�u�́v�Ői��ł���̂ł͂Ȃ��āA�w���m�̓����x�œ����Ă��邩��A
�Ƃ������ƂɂȂ�܂��B
����^�C�������͂ƒn�ʂ���Ԃ��Ă���͂́A�����͋t�ł����A��Βl�͓����Ȃ킯�ŁA
����^�C���̐ڒn�ʂ������X�s�[�h�Ɛg�̑S�̂�ԑ̂������X�s�[�h�̐�Βl�͓����ł���
�̂ł����A����͈��̃X�s�[�h�ɏオ���Ă���̘b�ŁA���͓����n�߁A�w�����x�x��
�Ⴂ�ɂ���܂��B ���ƑS�g�͏d�����܂�ňႢ�܂��A�^�C���Ǝԑ̂قǂł͂Ȃ��ɂ��Ă��A
�d�����Ⴆ�u�͂̑傫���v�������ł���u�����x�v�͈���Ă��܂��B
�����Ԃł͂��́u�����x�̈Ⴂ�v�̓N���b�`�Ń��X�������ĉ�������̂ł����A
�l�̂ł͑���o���Ő[���O�X�������ɂ͎��R�ɂܐ悾�����ڒn����悤�ɂȂ��āA
����̃N�b�V�����ő啔������������܂��B�l�c���̌㎈�̌`�́A���ꂪ�����Ɣ��B
���Ă���A�Ƃ������A�l�Ԃ̕����މ����Ă���킯�ŁA����Ŏl�c���̌㎈�̌`��
���͐��i�ɕK�{�ł���Ƃ������Ƃ̐����͂��B�[�Ƃ͂ł����Ǝv���܂����A�������
�����āA���{�b�g�ɂܐ旧������������悢���Ƃ����ƁA�����ł͂���܂���B
�l�̂̏ꍇ�A�w�[���O�X�x���K�v�Ȃ킯�ŁA�܂�A�Ҋ߂̏�ł͂Ȃ��A�Ҋ߂��
�O�ɓ��̂�����K�v������킯�ł��B
����́A�u�́v�Ői��ł���̂ł͂Ȃ��āA�w���m�̓����x�œ����Ă��邩��A
�Ƃ������ƂɂȂ�܂��B
����^�C�������͂ƒn�ʂ���Ԃ��Ă���͂́A�����͋t�ł����A��Βl�͓����Ȃ킯�ŁA
����^�C���̐ڒn�ʂ������X�s�[�h�Ɛg�̑S�̂�ԑ̂������X�s�[�h�̐�Βl�͓����ł���
�̂ł����A����͈��̃X�s�[�h�ɏオ���Ă���̘b�ŁA���͓����n�߁A�w�����x�x��
�Ⴂ�ɂ���܂��B ���ƑS�g�͏d�����܂�ňႢ�܂��A�^�C���Ǝԑ̂قǂł͂Ȃ��ɂ��Ă��A
�d�����Ⴆ�u�͂̑傫���v�������ł���u�����x�v�͈���Ă��܂��B
�����Ԃł͂��́u�����x�̈Ⴂ�v�̓N���b�`�Ń��X�������ĉ�������̂ł����A
�l�̂ł͑���o���Ő[���O�X�������ɂ͎��R�ɂܐ悾�����ڒn����悤�ɂȂ��āA
����̃N�b�V�����ő啔������������܂��B�l�c���̌㎈�̌`�́A���ꂪ�����Ɣ��B
���Ă���A�Ƃ������A�l�Ԃ̕����މ����Ă���킯�ŁA����Ŏl�c���̌㎈�̌`��
���͐��i�ɕK�{�ł���Ƃ������Ƃ̐����͂��B�[�Ƃ͂ł����Ǝv���܂����A�������
�����āA���{�b�g�ɂܐ旧������������悢���Ƃ����ƁA�����ł͂���܂���B
�l�̂̏ꍇ�A�w�[���O�X�x���K�v�Ȃ킯�ŁA�܂�A�Ҋ߂̏�ł͂Ȃ��A�Ҋ߂��
�O�ɓ��̂�����K�v������킯�ł��B
260 �F95=101�F05/01/07 08:08:21 ID:yXiSuPKm
259�̂悤�ɏ����ƁA247����̖₢����
>>�q�g���X�^�[�g���͒n�ʔ��͂𐄐i�ɂ��Ă�悤�Ɏv����B
�ɁA�uOh,Yes.Yes.�v�Ɠ����Ă�悤�Ɏv�킹�Ă��܂���ł����A�c�Ƃ������A���N�̏H�܂ł�
�m���ɂ����v���Ă܂����B�������A�u�O���̓v�b�V��(���͐��i)�v�Ƃ��Ȃ�����u�z���}���H�v��
�����Ƌ^���Ă��Ă܂����B�u���͂ɂ��Ă͐i�݉߂���c�v���ĂˁB
�ŁA���N�̏H�A����ȊO�̎�ڂł̓��삪�q���g�ɂȂ��āA�X�^�[�g����ł��u�e�R�v�ł�
���i���\�ł��邱�Ƃ��������̂ł����B�ł�����́A�ǂ��������Ĕ��͂Ői��ł���悤�ɂ���
�����܂���A�����ł̘b�Ƃ��ẮA�܂�����ŃC�C����ȁ`�����Ă��ƂɁB
���I�ɂ́A�X�^�[�g�͂����ʼn����͂������āA���Ԏ����ł́c�Ƃ������̂ł͂Ȃ��A�X�^�[�g����
�t�B�j�b�V���܂ŁA��������̓���ӎ��ɂ܂Ƃ߂�ꂽ���̂ŁA����ɂ͑喞�����Ă��ł���B
>>�q�g���X�^�[�g���͒n�ʔ��͂𐄐i�ɂ��Ă�悤�Ɏv����B
�ɁA�uOh,Yes.Yes.�v�Ɠ����Ă�悤�Ɏv�킹�Ă��܂���ł����A�c�Ƃ������A���N�̏H�܂ł�
�m���ɂ����v���Ă܂����B�������A�u�O���̓v�b�V��(���͐��i)�v�Ƃ��Ȃ�����u�z���}���H�v��
�����Ƌ^���Ă��Ă܂����B�u���͂ɂ��Ă͐i�݉߂���c�v���ĂˁB
�ŁA���N�̏H�A����ȊO�̎�ڂł̓��삪�q���g�ɂȂ��āA�X�^�[�g����ł��u�e�R�v�ł�
���i���\�ł��邱�Ƃ��������̂ł����B�ł�����́A�ǂ��������Ĕ��͂Ői��ł���悤�ɂ���
�����܂���A�����ł̘b�Ƃ��ẮA�܂�����ŃC�C����ȁ`�����Ă��ƂɁB
���I�ɂ́A�X�^�[�g�͂����ʼn����͂������āA���Ԏ����ł́c�Ƃ������̂ł͂Ȃ��A�X�^�[�g����
�t�B�j�b�V���܂ŁA��������̓���ӎ��ɂ܂Ƃ߂�ꂽ���̂ŁA����ɂ͑喞�����Ă��ł���B
261 �F���J�����������F05/01/07 08:49:01 ID:tQwn+DL2
���n�ʂɗ͂������ē������͂́A�d�S�̂���������ڒn�������琂���ɐ^����������Ƃ͐�ɂȂ�
�ڂ���
�ڂ���
262 �F95=101�F05/01/07 15:56:09 ID:yXiSuPKm
>>261 257�ɏ������̂�[���i�͂�ׂ�]�n�ʂɗ͂������ē������͂́@�ł��B
�����́�[���i�͂�ׂ�]��������ƃ��P����Ȃ��Ȃ�܂�����ˁB
�����257�̑O�̕����ɏ�������ł����@
���͂őO�ɐi�����Ƃ��鎞�ɁA�펯�I�ɂ͑���O������ցA�قڐ����ɓ������͂�
������ł����A����ɏd�͂���������w���́x���A�n�ʂɓ`���A���̐����̕�����
���͂����܂�܂��B�@�}���`����Ƃ�����ł����A�߂̖��╶�����N�̉��[�ɖ��
�`���Ȃ��̂Œf�O���܂����B
���������l�̂�^�����猩���}�ɕ`���ĉ������B���̗�����n�ʂɉ����Đ����Ɍ���
����ꂪ���i�͂悤�ƒn�ʂɓ��ꂽ�͂ł��B���ɑ��̗�����^���֖���ꂪ�d�́B
�����Ɍ��ւ̖��̐�[����^���ցA�܂�d�͂ƕ��s�ɁA�d�͂Ƃ��ĕ`�������Ɠ���������
�������~�낵�ďd�̖͂��̐�[�ƒ����Ō��т܂��B����Œ����`���ł��܂����B���̗����炱��
�����`�̑Ίp�������܂��B���̑Ίp�����d�͂Ƒ����n�ʂɐ����ɉ������͂�[����]�ł��B
���̗�������߉�������[����]�̐����̗́A�܂�A�O�ߏ�Ɍ������͂�
[���i�͂�ׂ�]�n�ʂɗ͂������ē������͂ł��B�Ȃ�Ƃ���}���Ă݂ĉ������B�@
�����́�[���i�͂�ׂ�]��������ƃ��P����Ȃ��Ȃ�܂�����ˁB
�����257�̑O�̕����ɏ�������ł����@
���͂őO�ɐi�����Ƃ��鎞�ɁA�펯�I�ɂ͑���O������ցA�قڐ����ɓ������͂�
������ł����A����ɏd�͂���������w���́x���A�n�ʂɓ`���A���̐����̕�����
���͂����܂�܂��B�@�}���`����Ƃ�����ł����A�߂̖��╶�����N�̉��[�ɖ��
�`���Ȃ��̂Œf�O���܂����B
���������l�̂�^�����猩���}�ɕ`���ĉ������B���̗�����n�ʂɉ����Đ����Ɍ���
����ꂪ���i�͂悤�ƒn�ʂɓ��ꂽ�͂ł��B���ɑ��̗�����^���֖���ꂪ�d�́B
�����Ɍ��ւ̖��̐�[����^���ցA�܂�d�͂ƕ��s�ɁA�d�͂Ƃ��ĕ`�������Ɠ���������
�������~�낵�ďd�̖͂��̐�[�ƒ����Ō��т܂��B����Œ����`���ł��܂����B���̗����炱��
�����`�̑Ίp�������܂��B���̑Ίp�����d�͂Ƒ����n�ʂɐ����ɉ������͂�[����]�ł��B
���̗�������߉�������[����]�̐����̗́A�܂�A�O�ߏ�Ɍ������͂�
[���i�͂�ׂ�]�n�ʂɗ͂������ē������͂ł��B�Ȃ�Ƃ���}���Ă݂ĉ������B�@
263 �F���J�����������F05/01/07 23:59:34 ID:tQwn+DL2
>>262
OK�B�����ł͊��S�ɉ����̈�{���̐��������Ă��������܂�����
>>255�̉��̐}�̏ꍇ�ɂ��Ă����l�ɉ�����Ă���������Ƃ��肪�����B
OK�B�����ł͊��S�ɉ����̈�{���̐��������Ă��������܂�����
>>255�̉��̐}�̏ꍇ�ɂ��Ă����l�ɉ�����Ă���������Ƃ��肪�����B
264 �F95=101�F05/01/08 07:50:34 ID:7QeijzZ+
�����H�@�u���S�ɉ����̈�{���̐����v��������ł͂Ȃ�������ł���B��{�r��
�������邷�鎞�ɁA�n�ʂɗ͂����鎞�_�ł́A�Е������������Ă��܂���A
������{�̋r���ȗ�������ł����A�����s���ł���܂���B
255�̉��̐}�Ƃ����ƁA�Ō�̐}�̂��Ƃ��Ǝv���܂����A
�@ �� ��
A�@|�@
|�P�P�_
|�@�@�@
B�@�@�@
>>�n�ʂɑ�B�����Ă��ďd�S���E�����ɐi�܂������̂����A
�\����u�́v��B����A�ɂނ��ė����(���̗�����u��p���v�ƌ���)�B
�d�S��BA�̉�����ɂȂ����߁u�d�S�͗͂̍�p����ɂ͂Ȃ��v
��
����́A�u�d�S���E�����ɐi�܂������v�Ƃ͂������̂́A�s�\����u�́v��B����A��
�ނ��ė����t�Ƃ������ƂɂȂ�ƁA�Б��ŗ����Ă��邾���ŁA�E�i�ނ��߂̗͂�
����Ă��Ȃ��Ƃ������ƂɂȂ�܂��ˁB����ƁA���̐}�ʼnE�ցA�Ƃ����ƁA�Ҋ߂�
�Ԋu�̊J���Ă�������ł�����A�O�ɐi�ނƂ������A�^���i�ނƂ������ƂɂȂ��ŁA
���̐}�ł͊m���ɉ��������������ς胏�J�����A�Ƃ������ƂɂȂ�ł��傤�ˁB
�������邷�鎞�ɁA�n�ʂɗ͂����鎞�_�ł́A�Е������������Ă��܂���A
������{�̋r���ȗ�������ł����A�����s���ł���܂���B
255�̉��̐}�Ƃ����ƁA�Ō�̐}�̂��Ƃ��Ǝv���܂����A
�@ �� ��
A�@|�@
|�P�P�_
|�@�@�@
B�@�@�@
>>�n�ʂɑ�B�����Ă��ďd�S���E�����ɐi�܂������̂����A
�\����u�́v��B����A�ɂނ��ė����(���̗�����u��p���v�ƌ���)�B
�d�S��BA�̉�����ɂȂ����߁u�d�S�͗͂̍�p����ɂ͂Ȃ��v
��
����́A�u�d�S���E�����ɐi�܂������v�Ƃ͂������̂́A�s�\����u�́v��B����A��
�ނ��ė����t�Ƃ������ƂɂȂ�ƁA�Б��ŗ����Ă��邾���ŁA�E�i�ނ��߂̗͂�
����Ă��Ȃ��Ƃ������ƂɂȂ�܂��ˁB����ƁA���̐}�ʼnE�ցA�Ƃ����ƁA�Ҋ߂�
�Ԋu�̊J���Ă�������ł�����A�O�ɐi�ނƂ������A�^���i�ނƂ������ƂɂȂ��ŁA
���̐}�ł͊m���ɉ��������������ς胏�J�����A�Ƃ������ƂɂȂ�ł��傤�ˁB
265 �F���J�����������F05/01/08 12:10:21 ID:++IFdE4E
>>264
[���m��]
�EB����d�S�܂ł̍��� = h
�E����A-B����d�S�܂ł̋��� = r
�E�d�͉����x = g >0
�E�d�S�ʒu = p=[x,y] (����������y���Ƃ���)
[����]
�E�^���͉�ʏ�(2�����ʓ�)�ɍS������Ă���B
�E���� m ���d�S�ɏW���B
�EB���Ƀ��[�����g�͔������Ȃ��B
�E�������� p=[r,h], p'=[0,0] (�܂�A-B�͉����A�d�S�͑��x0)
[���_]
B�ɓ����� f = [fx,fy]�̍�p���͏d�S��ʂ�B
[�ؖ�]
����A-B�ƁAB�Əd�S�����Ԓ����Ƃ̂Ȃ��p���ƂƂ���B
��=tan^-1 (r/h) �c (1)
�^����������
m x'' = fx �c (2)
m y'' = fy - m g �c (3)
m (h^2+r^2) ��'' = mgr �c (4)
(4)���
��'' = gr / (h^2+r^2) �c (4)*
(1)���
x=��(h^2+r^2)sin�� �c (5)
y=��(h^2+r^2)cos�� �c (6)
�����
x'= ��(h^2+r^2)��'cos��
y'=-��(h^2+r^2)��'sin��
x''= ��(h^2+r^2)(��''cos��-��'^2 sin��)
y''=-��(h^2+r^2)(��''sin��+��'^2 cos��)
�����������A
��'=0
����āA
x''= ��(h^2+r^2)��''cos�� �c (7)
y''=-��(h^2+r^2)��''sin�� �c (8)
(2),(3),(4)*,(5),(6),(7),(8)���
fx = mgrh / (h^2+r^2)
fy = mgh^2 / (h^2+r^2)
����āA
f= mgh / (h^2+r^2) [r,h] // [r,h]=p �c (*)
f�̍�p�_��B�B�����(*)���Af�̍�p���͏d�S��ʂ�B
Q.E.D.
[���m��]
�EB����d�S�܂ł̍��� = h
�E����A-B����d�S�܂ł̋��� = r
�E�d�͉����x = g >0
�E�d�S�ʒu = p=[x,y] (����������y���Ƃ���)
[����]
�E�^���͉�ʏ�(2�����ʓ�)�ɍS������Ă���B
�E���� m ���d�S�ɏW���B
�EB���Ƀ��[�����g�͔������Ȃ��B
�E�������� p=[r,h], p'=[0,0] (�܂�A-B�͉����A�d�S�͑��x0)
[���_]
B�ɓ����� f = [fx,fy]�̍�p���͏d�S��ʂ�B
[�ؖ�]
����A-B�ƁAB�Əd�S�����Ԓ����Ƃ̂Ȃ��p���ƂƂ���B
��=tan^-1 (r/h) �c (1)
�^����������
m x'' = fx �c (2)
m y'' = fy - m g �c (3)
m (h^2+r^2) ��'' = mgr �c (4)
(4)���
��'' = gr / (h^2+r^2) �c (4)*
(1)���
x=��(h^2+r^2)sin�� �c (5)
y=��(h^2+r^2)cos�� �c (6)
�����
x'= ��(h^2+r^2)��'cos��
y'=-��(h^2+r^2)��'sin��
x''= ��(h^2+r^2)(��''cos��-��'^2 sin��)
y''=-��(h^2+r^2)(��''sin��+��'^2 cos��)
�����������A
��'=0
����āA
x''= ��(h^2+r^2)��''cos�� �c (7)
y''=-��(h^2+r^2)��''sin�� �c (8)
(2),(3),(4)*,(5),(6),(7),(8)���
fx = mgrh / (h^2+r^2)
fy = mgh^2 / (h^2+r^2)
����āA
f= mgh / (h^2+r^2) [r,h] // [r,h]=p �c (*)
f�̍�p�_��B�B�����(*)���Af�̍�p���͏d�S��ʂ�B
Q.E.D.
266 �F95=101�F05/01/08 13:08:48 ID:7QeijzZ+
>>265 ����ɖ���������ł��傤�B
�����Ɏ��� m �͏d�S�ɏW�����Ă��Ȃ����A�^���͉�ʏ�(2�����ʓ�)�ɍS�������
���܂��AB���Ƀ��[�����g�͔����܂�����ˁB
�ŁA255�̐}�́A�Б��ŁA�����˂������Ă��邾���ł�����A����͂a�ɂ͂��炭�͂�
��p���͏d�S��ʂ�܂���B
�����Ɏ��� m �͏d�S�ɏW�����Ă��Ȃ����A�^���͉�ʏ�(2�����ʓ�)�ɍS�������
���܂��AB���Ƀ��[�����g�͔����܂�����ˁB
�ŁA255�̐}�́A�Б��ŁA�����˂������Ă��邾���ł�����A����͂a�ɂ͂��炭�͂�
��p���͏d�S��ʂ�܂���B
267 �F���J�����������F05/01/09 14:57:41 ID:eUystvQ1
>>95����A�j�����f�^�������Ƃ����Ă��܂����A�j���͑����̐l�Ɏx������Ă܂���B
243��244�̃��X�ł͂��܂�����͂�����Ƃ͎v���Ȃ��ł����A�v����ɓ̉���
�����Ȃ��ƌ�����̂��A�����Əڂ����A�����ł���̂Ȃ炵�Ă��炦�܂��H
243��244�̃��X�ł͂��܂�����͂�����Ƃ͎v���Ȃ��ł����A�v����ɓ̉���
�����Ȃ��ƌ�����̂��A�����Əڂ����A�����ł���̂Ȃ炵�Ă��炦�܂��H
268 �F���J�����������F05/01/09 22:01:17 ID:Gz8GFFjC
>>95��
��ʂ�ROM����ł����A���̕`���͊w�I�ȉ^���i���s�j���f�������܂��z���ł��Ȃ��łB
�Ƃ肠�����A
�E�r���f����3�����̕����̍��̃����N����Ȃ�B
�E���ꕔ�̖��C�͍m��B�i�ނ��늊��Ȃ��j
��OK�ł��傤���H
���{�b�g�̕��s�i���s�j���u�d�S�̈ړ��v�Ƒ��������ɂ����Ă�
�d�S-���Ԃ̍�p����p�i�u���v����=�d�S�ɍ�p����d��+�����́j��
���͂Ƃ��Ă���͖̂��炩�Ǝv���Ă����ł����A
���̐��ł͂���ɉ����āA�V���Ȑ��͑��肦��͂̍�p�����݂�����
�Ƃ����悤�ɓǂݎ��Ă��܂��Ă܂B�i�lj�͂���E�E�E�j
�i�j���[�g���͊w��ے肵�Ȃ��ƌ����Ă���̂ł�����̌���͖��炩�����ǁB�j
�Ƃ������A�C�J�T�}�݂����ȍ�}�̃e�R�������Ă��炦�Ȃ���
�^�₪����Ȃ��ăX�Q�[�C�ɂȂ�܂B
�e�L�g�[�ɃX�L���������菑���}�ł��������Ă��炦�܂��H
�ǂ��C�Ȑ���@�Ƃ��ɔ��W���邩���H
��ʂ�ROM����ł����A���̕`���͊w�I�ȉ^���i���s�j���f�������܂��z���ł��Ȃ��łB
�Ƃ肠�����A
�E�r���f����3�����̕����̍��̃����N����Ȃ�B
�E���ꕔ�̖��C�͍m��B�i�ނ��늊��Ȃ��j
��OK�ł��傤���H
���{�b�g�̕��s�i���s�j���u�d�S�̈ړ��v�Ƒ��������ɂ����Ă�
�d�S-���Ԃ̍�p����p�i�u���v����=�d�S�ɍ�p����d��+�����́j��
���͂Ƃ��Ă���͖̂��炩�Ǝv���Ă����ł����A
���̐��ł͂���ɉ����āA�V���Ȑ��͑��肦��͂̍�p�����݂�����
�Ƃ����悤�ɓǂݎ��Ă��܂��Ă܂B�i�lj�͂���E�E�E�j
�i�j���[�g���͊w��ے肵�Ȃ��ƌ����Ă���̂ł�����̌���͖��炩�����ǁB�j
�Ƃ������A�C�J�T�}�݂����ȍ�}�̃e�R�������Ă��炦�Ȃ���
�^�₪����Ȃ��ăX�Q�[�C�ɂȂ�܂B
�e�L�g�[�ɃX�L���������菑���}�ł��������Ă��炦�܂��H
�ǂ��C�Ȑ���@�Ƃ��ɔ��W���邩���H
269 �F95=101�F05/01/11 06:43:33 ID:0A0bxv92
>>267 �@243�A244�̃��X�ł͐����͂����������ł����B�j���E����̉����������ƌ����A���A����́A
���㋣�Z�̑���Ɋւ��āA�Ƃ������ƂŁA�Õ��p�Ɋւ��Ăł͂Ȃ��ł���B���Ƃ��Ƃ����{�̌Õ��p��
��������i���o�C����C�j���͎n�܂������̂ł�����A�����A���邢�͒ᑬ�ړ��Ɋւ��ĂȂ炢���炩��
���_�͂���̂�������܂��A�u����v�ɂ܂Ō��o�����Ă��Ă���̂ŕ��ɂ������˂�̂ł��B
�j���E����ɂ́A�m���Ɂw�M�ҁx�������̂�������܂���B���p�A�i���Z�A���Z�����łȂ��A���㋣�Z�ɂ�
�����ł��傤���A����́A�����ɉ^���A���Ɂu����v���͊w�ōl�@����Ă��Ȃ����A�Ƃ����ؖ��̂悤��
���̂ł��B�͊w�ő��肪���������͂���Ă���j���Ȃǂ����荞�ޗ]�n�͂���܂���ˁB
�j���E����̒��S�ł��鏬�c�L�ߎ��́A�u�͊w�Ȃōl���Ă͂����Ȃ��v�Ƃ�������ŁA���ہA
�͊w�ł̍l�@�͈����Ă��܂���B�Ȃ���ŁA�͊w�I�Ȑ����ł̖����������炤���Ƃ��ł��܂���A
�l�Ԃ̑���̘b�ɂȂ��Ă��܂��܂����A�u���������Ȃ��̂��H�v�̑��ɂ́A����Ə̂��ď��c����
���Ă��铮�삪��߂��邱�Ƃ��������܂��B����Ȃ��̂�M���Ē��N�ɓn���ė��K���ďK���ł���
�Ƃ��Ă��A���������Ƃ����ۏ͑S��������ł��B���������������Ƃ����ďK�������M�W���c�Ȃ̂ɁA
���������悤�ɂȂ�Ȃ���A����ꂽ���Z���������_�ɂȂ��Ă��܂��܂�����ˁB
�j���_�҂́A���E�ōł������I��͂��ׂāu�j��������}�X�^�[���Ă���v�ƌ����Ă��܂�����A���
�j�������g�ɂ���Α����Ȃ��A�ƁA�ÂɌ����Ă���킯�ł����A���E�ōł������I��͗�O�Ȃ��A
�w��ڎl����(�������̑O���̋ؓ�)�x�����ɔ��B���Ă��܂��B�j���ł͋r���O���A�܂�A�u�O�Ƀq�l��
�o���v�Ƃ����̂ł����A���̂��߂Ɏg���ؓ��́c���ł��傤�H�@���]��(�������̓���)�H�@��������
�w�����x���ُ�ɔ��B�����I��Ȃ�E�G�C�g���t�e�B���O�ɂ͌������܂����A����̑�����̑I��ɂ́A
��������܂���ˁB��ڎl���͕G��L�����߂̋ؓ��ŁA�r��O�Ƀq�l���o�����߂̋ؓ��ł͂���܂���B
�ő����Ă���n�Y�̑I�肪�A�j���ł͎g��Ȃ��ؓ������B���Ă���c�B�g��Ȃ��̂ɔ��B���Ă���ؓ��́A
�r��O�ɏo�����ɂ́u�d��v�ɂ����Ȃ�܂��A�܂��A�g��Ȃ��̂ɔ��B����Ƃ������Ǝ��̂��L�蓾�Ȃ�
��ł���B�@
���̈�_�����ł����E�ōł������I�肪���ׂāu�j��������}�X�^�[���Ă���v�Ƃ����̂��������A�Ƃ������
�E�\���Ƃ������Ƃ�����̂ł͂Ȃ��ł����H
���㋣�Z�̑���Ɋւ��āA�Ƃ������ƂŁA�Õ��p�Ɋւ��Ăł͂Ȃ��ł���B���Ƃ��Ƃ����{�̌Õ��p��
��������i���o�C����C�j���͎n�܂������̂ł�����A�����A���邢�͒ᑬ�ړ��Ɋւ��ĂȂ炢���炩��
���_�͂���̂�������܂��A�u����v�ɂ܂Ō��o�����Ă��Ă���̂ŕ��ɂ������˂�̂ł��B
�j���E����ɂ́A�m���Ɂw�M�ҁx�������̂�������܂���B���p�A�i���Z�A���Z�����łȂ��A���㋣�Z�ɂ�
�����ł��傤���A����́A�����ɉ^���A���Ɂu����v���͊w�ōl�@����Ă��Ȃ����A�Ƃ����ؖ��̂悤��
���̂ł��B�͊w�ő��肪���������͂���Ă���j���Ȃǂ����荞�ޗ]�n�͂���܂���ˁB
�j���E����̒��S�ł��鏬�c�L�ߎ��́A�u�͊w�Ȃōl���Ă͂����Ȃ��v�Ƃ�������ŁA���ہA
�͊w�ł̍l�@�͈����Ă��܂���B�Ȃ���ŁA�͊w�I�Ȑ����ł̖����������炤���Ƃ��ł��܂���A
�l�Ԃ̑���̘b�ɂȂ��Ă��܂��܂����A�u���������Ȃ��̂��H�v�̑��ɂ́A����Ə̂��ď��c����
���Ă��铮�삪��߂��邱�Ƃ��������܂��B����Ȃ��̂�M���Ē��N�ɓn���ė��K���ďK���ł���
�Ƃ��Ă��A���������Ƃ����ۏ͑S��������ł��B���������������Ƃ����ďK�������M�W���c�Ȃ̂ɁA
���������悤�ɂȂ�Ȃ���A����ꂽ���Z���������_�ɂȂ��Ă��܂��܂�����ˁB
�j���_�҂́A���E�ōł������I��͂��ׂāu�j��������}�X�^�[���Ă���v�ƌ����Ă��܂�����A���
�j�������g�ɂ���Α����Ȃ��A�ƁA�ÂɌ����Ă���킯�ł����A���E�ōł������I��͗�O�Ȃ��A
�w��ڎl����(�������̑O���̋ؓ�)�x�����ɔ��B���Ă��܂��B�j���ł͋r���O���A�܂�A�u�O�Ƀq�l��
�o���v�Ƃ����̂ł����A���̂��߂Ɏg���ؓ��́c���ł��傤�H�@���]��(�������̓���)�H�@��������
�w�����x���ُ�ɔ��B�����I��Ȃ�E�G�C�g���t�e�B���O�ɂ͌������܂����A����̑�����̑I��ɂ́A
��������܂���ˁB��ڎl���͕G��L�����߂̋ؓ��ŁA�r��O�Ƀq�l���o�����߂̋ؓ��ł͂���܂���B
�ő����Ă���n�Y�̑I�肪�A�j���ł͎g��Ȃ��ؓ������B���Ă���c�B�g��Ȃ��̂ɔ��B���Ă���ؓ��́A
�r��O�ɏo�����ɂ́u�d��v�ɂ����Ȃ�܂��A�܂��A�g��Ȃ��̂ɔ��B����Ƃ������Ǝ��̂��L�蓾�Ȃ�
��ł���B�@
���̈�_�����ł����E�ōł������I�肪���ׂāu�j��������}�X�^�[���Ă���v�Ƃ����̂��������A�Ƃ������
�E�\���Ƃ������Ƃ�����̂ł͂Ȃ��ł����H
270 �F95=101�F05/01/11 07:57:13 ID:0A0bxv92
�j���ő�������Ȃ��Ƃ��������́A�u�����ؓ����g���Ȃ��v�Ƃ������Ƃł��B���E�ōł������I���
�����������B���Ă���̂́A�ł����͂ȑ������̋ؓ����g���đ����Ă��邩��ł��B
�������́A���ւ�X�s�[�h�X�P�[�g�̑I��Ȃǂ̑������̂��̂������������������悤�ɁA
������ł��A�Ƃ����ƌ����߂���������܂��A�b����Βb����قǑ��������Ȃ蓾�܂��B
�����Ȃ�ؓ��ő����A�b����Α����Ȃ�A�Ƃ������Ƃ��w�����ւ̕ۏx�ƌ����郏�P�ł����A
�j���ɂ͂��ꂪ�S��������ł���B
>>268 �S�N�قǑO�Ɂu���z�e�R�̐}�v���A�A�b�v���Ă���������Ƃ�����̂ł����A���̐l�Ƃ͍��A
���M�s�ʂɂȂ��Ă��āA���̃A�b�v�����g�o�������Ă�����̂ŁA�����ł�낤�Ƃ���ƁA
�ǂ�����Ηǂ��̂ł��傤���H
�����������B���Ă���̂́A�ł����͂ȑ������̋ؓ����g���đ����Ă��邩��ł��B
�������́A���ւ�X�s�[�h�X�P�[�g�̑I��Ȃǂ̑������̂��̂������������������悤�ɁA
������ł��A�Ƃ����ƌ����߂���������܂��A�b����Βb����قǑ��������Ȃ蓾�܂��B
�����Ȃ�ؓ��ő����A�b����Α����Ȃ�A�Ƃ������Ƃ��w�����ւ̕ۏx�ƌ����郏�P�ł����A
�j���ɂ͂��ꂪ�S��������ł���B
>>268 �S�N�قǑO�Ɂu���z�e�R�̐}�v���A�A�b�v���Ă���������Ƃ�����̂ł����A���̐l�Ƃ͍��A
���M�s�ʂɂȂ��Ă��āA���̃A�b�v�����g�o�������Ă�����̂ŁA�����ł�낤�Ƃ���ƁA
�ǂ�����Ηǂ��̂ł��傤���H
271 �F���J�����������F05/01/11 09:19:49 ID:Dsu/Wd2X
>>270
�I�����C���X�g���[�W�T�[�r�X���g���̂������Ǝv���B
Yahoo!�u���[�t�P�[�X���ꎞ�I�Ɏ��̂���ԊȒP���ȁB
http://help.yahoo.co.jp/guide/jp/bc/
�I�����C���X�g���[�W�T�[�r�X���g���̂������Ǝv���B
Yahoo!�u���[�t�P�[�X���ꎞ�I�Ɏ��̂���ԊȒP���ȁB
http://help.yahoo.co.jp/guide/jp/bc/
272 �F95=101�F05/01/11 12:01:04 ID:0A0bxv92
>>271 ���肪�Ƃ��������܂��B����Ă݂܂����B���A����A���S�Ɍ��J���Ă����킯�ɂ�
�����܂���̂ŁA�c�ǂ����悤���ȁH�@
���t�[���[���������l�̃��t�[�h�c��m�点�Ă��炤���Ă��Ƃł����ł��傤���H�@
�����܂���̂ŁA�c�ǂ����悤���ȁH�@
���t�[���[���������l�̃��t�[�h�c��m�点�Ă��炤���Ă��Ƃł����ł��傤���H�@
273 �F���J�����������F05/01/11 12:53:53 ID:Dsu/Wd2X
>>272
>���S�Ɍ��J���Ă����킯�ɂ͂����܂���
�̗��R���킩��Ȃ��ƁA�Ȃ�Ƃ������Ȃ����c�c�A
�����\����������s���葽���ɂ͌��J�ł��Ȃ����Ă��ƂȂ�A
���J����͎̂~�߂Ƃ������������Ǝv����B
�����͓����f�������A���f�]�ڂ��ꂩ�˂Ȃ��B
�u���[�t�P�[�X���I�[�v���ɂł��Ȃ��Ƃ������ƂȂ�A
�g���̂ėp�ɐV����YahooID����蒼���������������ƁB
>���S�Ɍ��J���Ă����킯�ɂ͂����܂���
�̗��R���킩��Ȃ��ƁA�Ȃ�Ƃ������Ȃ����c�c�A
�����\����������s���葽���ɂ͌��J�ł��Ȃ����Ă��ƂȂ�A
���J����͎̂~�߂Ƃ������������Ǝv����B
�����͓����f�������A���f�]�ڂ��ꂩ�˂Ȃ��B
�u���[�t�P�[�X���I�[�v���ɂł��Ȃ��Ƃ������ƂȂ�A
�g���̂ėp�ɐV����YahooID����蒼���������������ƁB
274 �F���Z�a�m(MAB)�F05/01/11 14:27:13 ID:ZI6c9Cnn
�Q�Q�Q�Q�Q
�@�@�@�@�@�@�@,r''�L�@�@�@�@�@�@�@�@� '' �
�@�@�@�@r�]�]===r'''�P�P'''' - ..._�@�@�@� '' t.
�@�@�@�@{�@ �@}~�R�@�@�@�@�@/���''��=,,�@�@�@!
�@�@�@�@�� '�����R�[�]�]�]'�@�@�@�@�@��'''==!
�@�@�@�@|�@,,... -�]�]''''�P�P''' �]�]�@..,__�@�@�@!
�@�@�@�@l/�@�@�@�@�@�@�@......�@�@ �M�R :.: : .�],,j
�@�@�@�@ l�@,,...,�@�@�@�@''�@�@�M�@�@�@�@!:.: .:.,.r��;.
�@�@�@ �@!"�L�@� �R�@�L ,.���=�@�@�@�@�@! :.:/;; �@ }
�@�@�@�@ .i .��=��@;�@�@�@�@�@�@ �@�@�@!:�c /�@,.'
�@�@�@�@�@!.�@�@�@;!�@�@_,�@�@�@�@ �@ ;:.�@�@{.�^',
�@�@�@�@�@l�@ �@ ��@ ,,..�m�@ �@�@,.�@�@�@�@ !�@;;. ',
.�@�@�@�@�@ޤ�@�@ ` "�@�@ �@ ��@�@,.�@�@�@ ;.�@�@�@ ,........__
.�@�@�@�@�@�@ޤ�@�@,.-�]�]'',.�L�@�@_.�@�@ ,;�@�@�@�@�@�@ �R.�@�@�R
.�@�@�@�@�@�@�@� ��@�@-�]�@�@�@�@�@�@�@,:�@�@�@�@�@_,,-�]ށ@�@ �@�M�@�
.�@�@�@�@�@�@�@�@ � ��@ �@ �@ �@�@_,.�@'�@�@�@�@,.r �L�@�@�@�@�@�@�@�@ �R
�@�@�@�@�@�@�@�@�@�@ށ@�[ -�@'�@�@�@�@ �@,.r�L�@�@�@�@�@�@�@�@�@�@�@ �R
�@�@�@�@�@�@�@�@�@ �@�@�@�@�@�R.�@�@�@,.r �L�@�@�@�@�@�@�@�@�@�@�@�@�@�@�R
�@�@�@�@�@�@�@�@�@�@�@�@�@,. '�L �[�] '
�@�@�@�@�@�@�@,r''�L�@�@�@�@�@�@�@�@� '' �
�@�@�@�@r�]�]===r'''�P�P'''' - ..._�@�@�@� '' t.
�@�@�@�@{�@ �@}~�R�@�@�@�@�@/���''��=,,�@�@�@!
�@�@�@�@�� '�����R�[�]�]�]'�@�@�@�@�@��'''==!
�@�@�@�@|�@,,... -�]�]''''�P�P''' �]�]�@..,__�@�@�@!
�@�@�@�@l/�@�@�@�@�@�@�@......�@�@ �M�R :.: : .�],,j
�@�@�@�@ l�@,,...,�@�@�@�@''�@�@�M�@�@�@�@!:.: .:.,.r��;.
�@�@�@ �@!"�L�@� �R�@�L ,.���=�@�@�@�@�@! :.:/;; �@ }
�@�@�@�@ .i .��=��@;�@�@�@�@�@�@ �@�@�@!:�c /�@,.'
�@�@�@�@�@!.�@�@�@;!�@�@_,�@�@�@�@ �@ ;:.�@�@{.�^',
�@�@�@�@�@l�@ �@ ��@ ,,..�m�@ �@�@,.�@�@�@�@ !�@;;. ',
.�@�@�@�@�@ޤ�@�@ ` "�@�@ �@ ��@�@,.�@�@�@ ;.�@�@�@ ,........__
.�@�@�@�@�@�@ޤ�@�@,.-�]�]'',.�L�@�@_.�@�@ ,;�@�@�@�@�@�@ �R.�@�@�R
.�@�@�@�@�@�@�@� ��@�@-�]�@�@�@�@�@�@�@,:�@�@�@�@�@_,,-�]ށ@�@ �@�M�@�
.�@�@�@�@�@�@�@�@ � ��@ �@ �@ �@�@_,.�@'�@�@�@�@,.r �L�@�@�@�@�@�@�@�@ �R
�@�@�@�@�@�@�@�@�@�@ށ@�[ -�@'�@�@�@�@ �@,.r�L�@�@�@�@�@�@�@�@�@�@�@ �R
�@�@�@�@�@�@�@�@�@ �@�@�@�@�@�R.�@�@�@,.r �L�@�@�@�@�@�@�@�@�@�@�@�@�@�@�R
�@�@�@�@�@�@�@�@�@�@�@�@�@,. '�L �[�] '
275 �F268�F05/01/11 16:36:28 ID:IW11xUF+
>>272
���肢���Ă����ĉ��ł����A
���J�Ɋւ��ď����ł����������Ă���Ȃ�Ζ������Ȃ��ŁB
������͎�ɓ��s�̌�������Ă��ł���
���㔨�̈ӌ��E�����͂Ȃ��Ȃ����ڂɂ�����Ȃ����
������������ꂽ����ł�B
>257�㔼�́u���i�͂�ׂ��n�ʂɗ͂������ē������́`�v�̂����肪�u��H�v�Ǝv���Ƃ���ŁB
�����s�͏��ʂƕ��́i���ҁj�Ԃ̑��Ή^���Ȃ�ŁA���͎��̂͐��i�́i�̈ꕔ�j���肦��̂ł́B
���̔��͂��āu�H�ʂ���鐂���R�́{���C�́v�ł���ˁH
�P���Ȏ��_�ŏ����܂����A
�R��Ő���������p�i���́j�̉��������i�����R�́j�͏�́i�d��+�����͂̐��������j���x���A
���������i���C�́j�́u�����͂̔���p�v�̐��������Ƃ��ď�̂ɍ�p����B�i���i�́j
���ꂪ�A���͂����i�͂̈ꕔ���肦��Ƃ���ł͂Ǝv���܂B�i�������\�j
�i���i�n�����Ō���Ă��Ŕ��͂̍�p�����d�S�ʂ�Ȃ��Ƃ���]�n�͔����ɂ��āj
�@�@�@�@���́i�����R��+���C�́j
���_�@�������i��
�@�@�@�@��
�@�@�@�@�d��
�����͉��z�e�R�̌����́��̕ʕ\���̈�Ə���ɗ������Ă���
�����A���i�͂̉����Ɍ��ʓI�ɗ��p�ł��邩�ȁ[�Ǝv�����肵�āB
���t�g���Ƃ��A���Ȃ肢�������łˁE�E�Eorz
���肢���Ă����ĉ��ł����A
���J�Ɋւ��ď����ł����������Ă���Ȃ�Ζ������Ȃ��ŁB
������͎�ɓ��s�̌�������Ă��ł���
���㔨�̈ӌ��E�����͂Ȃ��Ȃ����ڂɂ�����Ȃ����
������������ꂽ����ł�B
>257�㔼�́u���i�͂�ׂ��n�ʂɗ͂������ē������́`�v�̂����肪�u��H�v�Ǝv���Ƃ���ŁB
�����s�͏��ʂƕ��́i���ҁj�Ԃ̑��Ή^���Ȃ�ŁA���͎��̂͐��i�́i�̈ꕔ�j���肦��̂ł́B
���̔��͂��āu�H�ʂ���鐂���R�́{���C�́v�ł���ˁH
�P���Ȏ��_�ŏ����܂����A
�R��Ő���������p�i���́j�̉��������i�����R�́j�͏�́i�d��+�����͂̐��������j���x���A
���������i���C�́j�́u�����͂̔���p�v�̐��������Ƃ��ď�̂ɍ�p����B�i���i�́j
���ꂪ�A���͂����i�͂̈ꕔ���肦��Ƃ���ł͂Ǝv���܂B�i�������\�j
�i���i�n�����Ō���Ă��Ŕ��͂̍�p�����d�S�ʂ�Ȃ��Ƃ���]�n�͔����ɂ��āj
�@�@�@�@���́i�����R��+���C�́j
���_�@�������i��
�@�@�@�@��
�@�@�@�@�d��
�����͉��z�e�R�̌����́��̕ʕ\���̈�Ə���ɗ������Ă���
�����A���i�͂̉����Ɍ��ʓI�ɗ��p�ł��邩�ȁ[�Ǝv�����肵�āB
���t�g���Ƃ��A���Ȃ肢�������łˁE�E�Eorz
276 �F95=101�F05/01/12 03:00:31 ID:eBhoSi+Y
>>275 ������Ɩ����Ă܂��B�u�b�`���P�Č����A�Ƃ������{�������Ă��炤���ƂɂȂ�܂����A
���͂���܂łɒm�����ł͂R��A���쌠�N�Q������Ă��ł���B�R�l�A��������L����w�̋����ŁA
��l�͒��L���l�ŁA�܂��A���e�͎��̒��ł͑債�����ƂȂ����̂Ȃ̂ŁA�����Ă����Ă��ł����A
�����̌��t�A���������̂܂G���A�r�f�I�A�e���r�ԑg�Ŏg���Ă��̂�m�������ɂ́A�����A
�u���쌠�N�Q�v�Ƃ�����肤�ꂵ�������قǂł����B(�F�l�ɂ́u���O�͂��l�D���Ƃ������A�z���v��
�����܂������ǂˁB)�@���̂R�l�ɂ̓��|�[�g�𑗂��Ă������̂ŁA�i�悵���A�悤�Ȋ��o�������ƁB
�u���ɐ��i�͂��鉼�z�e�R�v�́A������ɂ͋����ĂȂ��āA�S�N�O�Ɉ�x�A�}�j�A�b�N�ȗ����
�����Ҍ����Z�҂̂g�o�Ō��J�����̂ł����A������u�ے�̂��߂̔ے�v�̈ӌ���������āA�܂�
�C���̈����������ƁB������Ђ��������Ă��ł���B
�u���z�e�R�v�̐}����e���̂́A�܂��A�o�J�݂����ɊȒP�Șb�����A���̂܂܂ł͑S�����p�ɂȂ�Ȃ�
�u�P�Ȃ錴���v�Ȃ��̂ŁA�\��Ȃ��Ƃ����\��Ȃ��̂ł����A�\�z�O�ɉ����N���邩����܂���A
�����ɕs���͊����Ă܂��ˁB
����ɁA�Ƃ����̂����ł����A���̃u���[�t�P�[�X���g���邱�ƂŁA����܂łɐ}�����ŃJ�L�R���Ă���
���̂ɐ}��������킯�ł�����A�������������Ƃ��ł��܂��ˁB�w�����Ԃ��x���ƋC�����Ȃ�
�ł��傤���ǂˁB
275�ŁA�ȒP�Ȑ}���ŕ\����Ă�����̂́A��͂艼�z�e�R�Ƃ͑S���Ⴂ�܂��B�����258�Łw�Y���x��
�i��ł���Ɛ����������̂ł��ˁB
�C�ɂȂ錾�t����A>>�����s�͏��ʂƕ��́i���ҁj�Ԃ́w���Ή^���x������A���́w���x�Ƃ���
�Ӗ��B���ꂪ�ǂ������Ӗ��Ȃ̂��H���A���̂������C�ɂȂ�܂��B�n�ʂ͓����܂���(�n���̎��]
�Ƃ������b�ł͖����ł�����ˁB)����A�w���x�ƍl����ׂ��ł͖����Ǝv���܂��B
�悭�u���[�������i�[�v�u�����j���O�}�V���v�Ŏ�����������肵�Ă܂����A����A�����Ƃ����̂�
�n�ʂ̏���ړ����邱�ƂŁA�x���g�R���x�A�̏�ő������Ă��邾���Ƃ͑S�R�Ⴂ�܂��B�w���x
�Ƃ������t�ŘA�z����̂����̃x���g�R���x�A�Ȃ�ł����A�u�����j���O�}�V���v�̏�ŁA��������̂�
�������������Ă��Ă�����́u���ĔۂȂ���́v�ŁA�x���g�R���x�A�̏�ł͈�ؓ����Ă��Ȃ��A�܂�
���i�͂͑S���K�v�����킯�ŁA�n�ʂ̏���u��ΓI�Ɂv�ړ�����ɂ́A���i�͕͂K�v�ł�����ˁB
���͂���܂łɒm�����ł͂R��A���쌠�N�Q������Ă��ł���B�R�l�A��������L����w�̋����ŁA
��l�͒��L���l�ŁA�܂��A���e�͎��̒��ł͑債�����ƂȂ����̂Ȃ̂ŁA�����Ă����Ă��ł����A
�����̌��t�A���������̂܂G���A�r�f�I�A�e���r�ԑg�Ŏg���Ă��̂�m�������ɂ́A�����A
�u���쌠�N�Q�v�Ƃ�����肤�ꂵ�������قǂł����B(�F�l�ɂ́u���O�͂��l�D���Ƃ������A�z���v��
�����܂������ǂˁB)�@���̂R�l�ɂ̓��|�[�g�𑗂��Ă������̂ŁA�i�悵���A�悤�Ȋ��o�������ƁB
�u���ɐ��i�͂��鉼�z�e�R�v�́A������ɂ͋����ĂȂ��āA�S�N�O�Ɉ�x�A�}�j�A�b�N�ȗ����
�����Ҍ����Z�҂̂g�o�Ō��J�����̂ł����A������u�ے�̂��߂̔ے�v�̈ӌ���������āA�܂�
�C���̈����������ƁB������Ђ��������Ă��ł���B
�u���z�e�R�v�̐}����e���̂́A�܂��A�o�J�݂����ɊȒP�Șb�����A���̂܂܂ł͑S�����p�ɂȂ�Ȃ�
�u�P�Ȃ錴���v�Ȃ��̂ŁA�\��Ȃ��Ƃ����\��Ȃ��̂ł����A�\�z�O�ɉ����N���邩����܂���A
�����ɕs���͊����Ă܂��ˁB
����ɁA�Ƃ����̂����ł����A���̃u���[�t�P�[�X���g���邱�ƂŁA����܂łɐ}�����ŃJ�L�R���Ă���
���̂ɐ}��������킯�ł�����A�������������Ƃ��ł��܂��ˁB�w�����Ԃ��x���ƋC�����Ȃ�
�ł��傤���ǂˁB
275�ŁA�ȒP�Ȑ}���ŕ\����Ă�����̂́A��͂艼�z�e�R�Ƃ͑S���Ⴂ�܂��B�����258�Łw�Y���x��
�i��ł���Ɛ����������̂ł��ˁB
�C�ɂȂ錾�t����A>>�����s�͏��ʂƕ��́i���ҁj�Ԃ́w���Ή^���x������A���́w���x�Ƃ���
�Ӗ��B���ꂪ�ǂ������Ӗ��Ȃ̂��H���A���̂������C�ɂȂ�܂��B�n�ʂ͓����܂���(�n���̎��]
�Ƃ������b�ł͖����ł�����ˁB)����A�w���x�ƍl����ׂ��ł͖����Ǝv���܂��B
�悭�u���[�������i�[�v�u�����j���O�}�V���v�Ŏ�����������肵�Ă܂����A����A�����Ƃ����̂�
�n�ʂ̏���ړ����邱�ƂŁA�x���g�R���x�A�̏�ő������Ă��邾���Ƃ͑S�R�Ⴂ�܂��B�w���x
�Ƃ������t�ŘA�z����̂����̃x���g�R���x�A�Ȃ�ł����A�u�����j���O�}�V���v�̏�ŁA��������̂�
�������������Ă��Ă�����́u���ĔۂȂ���́v�ŁA�x���g�R���x�A�̏�ł͈�ؓ����Ă��Ȃ��A�܂�
���i�͂͑S���K�v�����킯�ŁA�n�ʂ̏���u��ΓI�Ɂv�ړ�����ɂ́A���i�͕͂K�v�ł�����ˁB
277 �F���J�����������F05/01/12 03:09:09 ID:lVpGn36i
���Ⴀ�������Ƙ_�����o����B
278 �F���J�����������F05/01/12 03:54:26 ID:+lMS72KV
>>272,275
�Ƃ肠�����A95�����268�����ɁA�摜�������������Ȃ��ł����H
268����̓��{�b�g�̌����҂̂悤�ł����𗧂ĂĂ����ł��傤�B
�ŁA268���H�w�n�̗p��ł����������Ă����Ζ��Ȃ��B
�Ƃ肠�����A95�����268�����ɁA�摜�������������Ȃ��ł����H
268����̓��{�b�g�̌����҂̂悤�ł����𗧂ĂĂ����ł��傤�B
�ŁA268���H�w�n�̗p��ł����������Ă����Ζ��Ȃ��B
279 �F268�F05/01/12 16:36:41 ID:+RtvGoJ3
>>275
���J���ꂵ���_�����łB
�̂ă��A�h����ĎN���Ă������̂ł����A�����������O���琄�@���Ă���ɂ��܂B
>�����258�Łw�Y���x�Ői��ł���Ɛ����������̂ł��ˁB
���[�ƁA�Y���ƌ������A���i�n�݂̂Ŋς��͂̍�p�W�������������łB
���t�ς��Đ������̂�>258�ƂȂ��ς��Ȃ��łB�X�}�\�B
�d�S�i���_�������ʋr�j�ɍ�p����͊W���P��������Ƃ����Ȃ�ƁB
������i�̃O���[�v�j�́u�r�ɂ��ړ��v���u�d�S�̈ړ��v�ƒP���ɑ����Đ���@���l���܂B
�i���䃂�f�������炢�y�Ȃ�ł��悱�ꂪ�E�E�E�B�j
�P�����͌�������傫���������镾�Q������܂����A
�{���I�ȕ����𖾂炩�ɂ���ɂ͏\���ȏꍇ������̂ŁB
>���́w���x�Ƃ����Ӗ��B
���[�A�u���v�͌�p�ł�orz�B
�u�����s�͏��ʂƕ��́i���ҁj�Ԃ́w���ݍ�p�ɂ��^���x�v�łi�T
�i�������s�̑؋��Ԃ͂��̌��肶��Ȃ��ł��ˁB�j
�����Ԃ����Ⴂ�܂����A����܂ł�95=101���̃��X��ǂݕԂ���
�u���z�e�R���`��������t�H�[���ɂ����Đ��i�͂��ő�ƂȂ���������݂���v
�Ƃ����悤�ɊςĂ��܂��̂ł����A���̂悤�ȔF���͈Ӑ}����O��Ă܂����H
���Ă̂́A��͂胍�{�b�g�́i�����s�ɂ��j�ړ��Ƃ͊O����胍�{�b�g�ɍ�p�����
�i�O�́F���{�b�g�̋r�^���ɂ�锽��p�E�d�͂��܂߂āj�������Ĕ���������̂ł����āA
���őz�肳���O�͂����i�́i�̖{���j�Ŗ����Ȃ�A��̉������i�͂Ƃ��ē����̂��A
�Ǝv������ŁB���������_����A�w�I�Ɍ`�����ꂽ���z�e�R��
�i���́A�d�͂Ȃǂ́j�O�͂���ɂ�����������̗͂̂悤�ɖϑz���܂B
�i����͂���Ő����g�����肪�ǂ���������܂���j
���J���ꂵ���_�����łB
�̂ă��A�h����ĎN���Ă������̂ł����A�����������O���琄�@���Ă���ɂ��܂B
>�����258�Łw�Y���x�Ői��ł���Ɛ����������̂ł��ˁB
���[�ƁA�Y���ƌ������A���i�n�݂̂Ŋς��͂̍�p�W�������������łB
���t�ς��Đ������̂�>258�ƂȂ��ς��Ȃ��łB�X�}�\�B
�d�S�i���_�������ʋr�j�ɍ�p����͊W���P��������Ƃ����Ȃ�ƁB
������i�̃O���[�v�j�́u�r�ɂ��ړ��v���u�d�S�̈ړ��v�ƒP���ɑ����Đ���@���l���܂B
�i���䃂�f�������炢�y�Ȃ�ł��悱�ꂪ�E�E�E�B�j
�P�����͌�������傫���������镾�Q������܂����A
�{���I�ȕ����𖾂炩�ɂ���ɂ͏\���ȏꍇ������̂ŁB
>���́w���x�Ƃ����Ӗ��B
���[�A�u���v�͌�p�ł�orz�B
�u�����s�͏��ʂƕ��́i���ҁj�Ԃ́w���ݍ�p�ɂ��^���x�v�łi�T
�i�������s�̑؋��Ԃ͂��̌��肶��Ȃ��ł��ˁB�j
�����Ԃ����Ⴂ�܂����A����܂ł�95=101���̃��X��ǂݕԂ���
�u���z�e�R���`��������t�H�[���ɂ����Đ��i�͂��ő�ƂȂ���������݂���v
�Ƃ����悤�ɊςĂ��܂��̂ł����A���̂悤�ȔF���͈Ӑ}����O��Ă܂����H
���Ă̂́A��͂胍�{�b�g�́i�����s�ɂ��j�ړ��Ƃ͊O����胍�{�b�g�ɍ�p�����
�i�O�́F���{�b�g�̋r�^���ɂ�锽��p�E�d�͂��܂߂āj�������Ĕ���������̂ł����āA
���őz�肳���O�͂����i�́i�̖{���j�Ŗ����Ȃ�A��̉������i�͂Ƃ��ē����̂��A
�Ǝv������ŁB���������_����A�w�I�Ɍ`�����ꂽ���z�e�R��
�i���́A�d�͂Ȃǂ́j�O�͂���ɂ�����������̗͂̂悤�ɖϑz���܂B
�i����͂���Ő����g�����肪�ǂ���������܂���j
280 �F95=101�F05/01/12 20:35:05 ID:eBhoSi+Y
268����A�X���h�C�ł���B
�u���z�e�R���`��������t�H�[���ɂ����Đ��i�͂��ő�ƂȂ���������݂���v
���̒ʂ�ł��B�Ɍ��܂ł̃X�s�[�h�̒Nj�������Z�����̌����̃e�[�}�ł����A����܂�
�u�ǂ�����Α��������̂��H�v�ɁA�������肵���A�܂�͊w�I�ȍ�����������������
����������ł����A���z�e�R�ɂ���āA���l�܂ł͏o���Ȃ��ɂ��Ă��A���i�͂̋���A
�������鎞�Ԃ̒��Z�����E�������������悤�ɂȂ�܂����B�c����悤�ɂȂ����̂�
�U�N�O�A�e�R�ɋC�Â����̂�12�N���O�ł����ˁB����Ǝ��p���ł����ƌ�����悤��
�Ȃ����̂����N�̏H�B�i�}�g�̐l�Ԃɂ́A�X�^�[�e�B���O�u���b�N���g�����X�^�[�g����
���́u���i�͂��ő�ɂȂ�����v��������ɂȂ���̂����ɓ��������ł����B
�w���x�ł͂Ȃ��A�u���ʂƕ��́i���ҁj�Ԃ́w���ݍ�p�x�ɂ��^���v���Ă̂́A
�܂����ꂩ��b�����Ă䂭�ׂ����ł��傤�ˁB�w���ݍ�p�x�Ƃ́A�X�i���`�w��p����p�x
���Ă��Ƃł��傤����A�������A���̍ی������܂��܂����A�u�n�ʔ��͂Ői�ށv�Ƃ����̂�
�u�ϑz�v�ł����B�u�w�I�Ɍ`�����ꂽ���z�e�R(������A���̒ʂ�)�v�́A��������
�w�O�͂̂��Ƃ��x���𐅕��ɉ����Ă�����ł���B2000�N�ɕ������ꂽ�e�����́u�L�����v
�Ƃ����ԑg�ŁA100���̌����{�L�^�ێ��҂̈ɓ��_�i�I�肪�A10�b00���o�������̉�z�ŁA
�u�N���ɍ���������Ă���悤�ȁv�ƌ����Ă���ł����A�����������o�́A���͂ł͌�����
�����邱�Ƃ͂Ȃ���ł���B���͂����ɐ����ɂ͂��炭�Ƃ������Ƃ͐�ɂ���܂���ˁB
�����������ɂȂ�ƁA�w����x�Ƃ����̂́A����͊y�Ȃ��̂ɂȂ�Ǝv���܂���B�O�ɂ�
�����܂������A���̂̕�����i��ł����܂�����A����ƌĂԕK�v���Ȃ����炢�ɂȂ邩��
����Ȃ��ł��ˁB
>>277 �����_���ɂ���̂͂��łɂ���Ă����ǁA������o���w��̒��S���A����
���쌠�N�Q��������A���Ȃ��̂ŁA�o�������Ȃ���B���{�b�g�H�w�̊w��ɗ���̌�����
���|�[�g���o���킯�ɂ�������c������������ǁA����Ă����H �@�@�@�@�@
�u���z�e�R���`��������t�H�[���ɂ����Đ��i�͂��ő�ƂȂ���������݂���v
���̒ʂ�ł��B�Ɍ��܂ł̃X�s�[�h�̒Nj�������Z�����̌����̃e�[�}�ł����A����܂�
�u�ǂ�����Α��������̂��H�v�ɁA�������肵���A�܂�͊w�I�ȍ�����������������
����������ł����A���z�e�R�ɂ���āA���l�܂ł͏o���Ȃ��ɂ��Ă��A���i�͂̋���A
�������鎞�Ԃ̒��Z�����E�������������悤�ɂȂ�܂����B�c����悤�ɂȂ����̂�
�U�N�O�A�e�R�ɋC�Â����̂�12�N���O�ł����ˁB����Ǝ��p���ł����ƌ�����悤��
�Ȃ����̂����N�̏H�B�i�}�g�̐l�Ԃɂ́A�X�^�[�e�B���O�u���b�N���g�����X�^�[�g����
���́u���i�͂��ő�ɂȂ�����v��������ɂȂ���̂����ɓ��������ł����B
�w���x�ł͂Ȃ��A�u���ʂƕ��́i���ҁj�Ԃ́w���ݍ�p�x�ɂ��^���v���Ă̂́A
�܂����ꂩ��b�����Ă䂭�ׂ����ł��傤�ˁB�w���ݍ�p�x�Ƃ́A�X�i���`�w��p����p�x
���Ă��Ƃł��傤����A�������A���̍ی������܂��܂����A�u�n�ʔ��͂Ői�ށv�Ƃ����̂�
�u�ϑz�v�ł����B�u�w�I�Ɍ`�����ꂽ���z�e�R(������A���̒ʂ�)�v�́A��������
�w�O�͂̂��Ƃ��x���𐅕��ɉ����Ă�����ł���B2000�N�ɕ������ꂽ�e�����́u�L�����v
�Ƃ����ԑg�ŁA100���̌����{�L�^�ێ��҂̈ɓ��_�i�I�肪�A10�b00���o�������̉�z�ŁA
�u�N���ɍ���������Ă���悤�ȁv�ƌ����Ă���ł����A�����������o�́A���͂ł͌�����
�����邱�Ƃ͂Ȃ���ł���B���͂����ɐ����ɂ͂��炭�Ƃ������Ƃ͐�ɂ���܂���ˁB
�����������ɂȂ�ƁA�w����x�Ƃ����̂́A����͊y�Ȃ��̂ɂȂ�Ǝv���܂���B�O�ɂ�
�����܂������A���̂̕�����i��ł����܂�����A����ƌĂԕK�v���Ȃ����炢�ɂȂ邩��
����Ȃ��ł��ˁB
>>277 �����_���ɂ���̂͂��łɂ���Ă����ǁA������o���w��̒��S���A����
���쌠�N�Q��������A���Ȃ��̂ŁA�o�������Ȃ���B���{�b�g�H�w�̊w��ɗ���̌�����
���|�[�g���o���킯�ɂ�������c������������ǁA����Ă����H �@�@�@�@�@
281 �F���J�����������F05/01/12 20:58:56 ID:S1yG+djX
���ڗ��̋ؓ����b���Ȃ��Ⴞ�߂��Ȃ��c�H
282 �F268�F05/01/12 22:12:41 ID:+RtvGoJ3
>>280
�ɓ��I��̘b�͕��������Ƃ�����܂��B�iTV�̓��e�Ɋւ��Ă͖Y�p�̔ޕ��ł����E�E�E�B�j
�����A���s�̊�b�����œ|���U�q���f���ɂ�����ZMP�Əd�S�̉^���W�����������Ƃ������āA
�O���[�v���ňɓ��I��̃g�s�ɐG�ꂽ���Ƃ�����������ŁB
������Ƙb�͈��܂����A�͊w�I�ɕ��s���f�������h���c�q�̂悤�ȓ|���U�q�ɋߎ����Ĉ������ꍇ�A
ZMP���x�_�Ƃ����|���U�q�Ƃ��Ă݂邱�Ƃ��o���܂��B�i��O�j
�@�@�@�@�@�����_�d�S
�@�@�@�@�@�b�@�@�@�@�@�@�@�@�@�@�@�i�����������̉^���Ƃ��A
�@�@�@�@�@�b�@���i�s�����@�@�@�S���s�����͒P�r�x���A���Ɖ���j
�@�@�@�@�@�b
����@�@��
�����Ŏ��_�d�S�̉^���𐅕��ʂɍS������ƁA���_�d�S�̉^���͂��̐����ʓ��Ő��`������܂��B
�i���`���F�d�S�̉^�����e�Ղɗ\��������Ƃ������Ƃł��B����ɂ��Ă�
�Y������HRP�O���[�v�̊��c����Ƃ����������̘_���o���Ă܂��̂ł�������Q�Ƃ��ĉ������B�j
�ύׂ͏Ȃ��܂����A�d�S�̉^���͏��������Ɉˑ�����
ZMP�𒆐S�Ƃ����˗͏�Ɏx�z���ꂽ���̂Ȃ�܂��B�i������Ƌ����G�j
���_�d�S�@�@��������
�@�@�@�@�@ �@ /
�@�@�@�@�@�@ /�@�@�@�@�@�@�����ŁAZMP�������iZMP1�j�A�ܐ摤�iZMP2�j�ɌŒ肷���
�@�@�@�@�@ /�@�@�@�@�@�@�@������x�����̓x�����������ł��܂��B
����@�@���@�@�@�@�@�@�@�i���f����A���i�͂ɑ�������͂͏d�S�ɑ��Đ����ɍ�p���܂��j
�@�@�@�@����
�@ZMP1�@ZMP2
���̏ꍇ�A������ZMP�i���菊�ƌ����̂����������ȁj�������Ă���ΐ��͍ő�ł��B
�����̂̃O���[�v���̘b�Ő��m�ɉ����Ă��܂��A
�ɓ��I��̑���ƁA����ZMP�̃R���g���[�����`�E�E�ƂȂ������̂ł����B
����A�܂��A�u�N���ɍ���������Ă���悤�ȁv�Ƃ����Ƃ���ŁA���ƂȂ��v���o���܂����B
�ʕ��X�}�\�B
�ɓ��I��̘b�͕��������Ƃ�����܂��B�iTV�̓��e�Ɋւ��Ă͖Y�p�̔ޕ��ł����E�E�E�B�j
�����A���s�̊�b�����œ|���U�q���f���ɂ�����ZMP�Əd�S�̉^���W�����������Ƃ������āA
�O���[�v���ňɓ��I��̃g�s�ɐG�ꂽ���Ƃ�����������ŁB
������Ƙb�͈��܂����A�͊w�I�ɕ��s���f�������h���c�q�̂悤�ȓ|���U�q�ɋߎ����Ĉ������ꍇ�A
ZMP���x�_�Ƃ����|���U�q�Ƃ��Ă݂邱�Ƃ��o���܂��B�i��O�j
�@�@�@�@�@�����_�d�S
�@�@�@�@�@�b�@�@�@�@�@�@�@�@�@�@�@�i�����������̉^���Ƃ��A
�@�@�@�@�@�b�@���i�s�����@�@�@�S���s�����͒P�r�x���A���Ɖ���j
�@�@�@�@�@�b
����@�@��
�����Ŏ��_�d�S�̉^���𐅕��ʂɍS������ƁA���_�d�S�̉^���͂��̐����ʓ��Ő��`������܂��B
�i���`���F�d�S�̉^�����e�Ղɗ\��������Ƃ������Ƃł��B����ɂ��Ă�
�Y������HRP�O���[�v�̊��c����Ƃ����������̘_���o���Ă܂��̂ł�������Q�Ƃ��ĉ������B�j
�ύׂ͏Ȃ��܂����A�d�S�̉^���͏��������Ɉˑ�����
ZMP�𒆐S�Ƃ����˗͏�Ɏx�z���ꂽ���̂Ȃ�܂��B�i������Ƌ����G�j
���_�d�S�@�@��������
�@�@�@�@�@ �@ /
�@�@�@�@�@�@ /�@�@�@�@�@�@�����ŁAZMP�������iZMP1�j�A�ܐ摤�iZMP2�j�ɌŒ肷���
�@�@�@�@�@ /�@�@�@�@�@�@�@������x�����̓x�����������ł��܂��B
����@�@���@�@�@�@�@�@�@�i���f����A���i�͂ɑ�������͂͏d�S�ɑ��Đ����ɍ�p���܂��j
�@�@�@�@����
�@ZMP1�@ZMP2
���̏ꍇ�A������ZMP�i���菊�ƌ����̂����������ȁj�������Ă���ΐ��͍ő�ł��B
�����̂̃O���[�v���̘b�Ő��m�ɉ����Ă��܂��A
�ɓ��I��̑���ƁA����ZMP�̃R���g���[�����`�E�E�ƂȂ������̂ł����B
����A�܂��A�u�N���ɍ���������Ă���悤�ȁv�Ƃ����Ƃ���ŁA���ƂȂ��v���o���܂����B
�ʕ��X�}�\�B
283 �F���J�����������F05/01/12 23:22:55 ID:VFRXYtOz
�͂����肨�������ꂽ���ƂȂ�ł�����͂�����\���グ�܂���
���u�n�ʔ��͂Ői�ށv�Ƃ����̂��u�ϑz�v�ł����B
�������Ēn�ʂƂ̃C���^���N�V�����ȊO�̓��͂����݂��Ȃ��̂͌��R���鎖���B
�����͂����ɐ����ɂ͂��炭�Ƃ������Ƃ͐�ɂ���܂���ˁB
����܂���Ȃ̂���
���u�n�ʔ��͂Ői�ށv�Ƃ����̂��u�ϑz�v�ł����B
�������Ēn�ʂƂ̃C���^���N�V�����ȊO�̓��͂����݂��Ȃ��̂͌��R���鎖���B
�����͂����ɐ����ɂ͂��炭�Ƃ������Ƃ͐�ɂ���܂���ˁB
����܂���Ȃ̂���
284 �F���J�����������F05/01/13 03:13:10 ID:zRsqnYrB
>>280
���d�͋�Ԃł��A�r��U��ΑO�i�ł�����Ă��ƁH
���d�͋�Ԃł��A�r��U��ΑO�i�ł�����Ă��ƁH
285 �F���J���������� �F05/01/13 05:30:31 ID:k3rHdQhA
������x�ǂ�ł݂���ł����A����Ȋ����ł����ł����H���M�Ȃ��ł����B
�V�r�Ƀg���N�������Č�납��O�ɏo�����ꍇ�A
�R�葫�E�㔼�g�ɔ��g���N�������A�t���։�]���悤�Ƃ���B
���̂Ƃ��R�葫�͒n�ʂɍS������Ă��邩��A�ڒn�_���ɉ�]����B
���̂��ߍ��ɂ͐ڒn�_���Ƀg���N�������B
�R�葫���n�ʂɐ����ƂȂ�p�x�t�߂ŁA���p�x�̕ω���
�\����������A�g���N�����ւ̐����͂ɕϊ��ł��A���i�͂Ƃ݂Ȃ���B
���Ă��Ƃł����ł��傤���H
�V�r�Ƀg���N�������Č�납��O�ɏo�����ꍇ�A
�R�葫�E�㔼�g�ɔ��g���N�������A�t���։�]���悤�Ƃ���B
���̂Ƃ��R�葫�͒n�ʂɍS������Ă��邩��A�ڒn�_���ɉ�]����B
���̂��ߍ��ɂ͐ڒn�_���Ƀg���N�������B
�R�葫���n�ʂɐ����ƂȂ�p�x�t�߂ŁA���p�x�̕ω���
�\����������A�g���N�����ւ̐����͂ɕϊ��ł��A���i�͂Ƃ݂Ȃ���B
���Ă��Ƃł����ł��傤���H
286 �F95=101�F05/01/13 16:16:41 ID:3F22fi2X
>>285 �ʔ����ł��ˁB�u�n�߂ɍ��ɐ��i�͂��肫�v�ŁA�l���Ă����Ƃ��������J���N����
�l�����܂��ˁB����Ŗ��ɂȂ�̂͗V�r�̎��ʂƁA�V�r�ȊO�̕����̎��ʂ̑傫����
�Ⴂ�ł��ˁB�u�g���N�v�Ƃ������ƂɂȂ�ƁA�������[�����g�̃A�[���̒�����������
���܂�����A�V�r�̎��ʂƗV�r�̉�]���a����o������g���N�̑傫���ŁA�V�r�ȊO��
�����̎��ʂ��ڒn�����獘�܂ł���]���a�Ƃ������̂��������H�Ƃ������ƂɂȂ�ƁA
�V�r�ȊO�̕����̎��ʂ����Ƃ��Ă��A�V�r���͂邩�ɑ傫���ł�����A�c�O�Ȃ���
����͓����Ȃ��A�ƁA�������ƂɂȂ�܂��ˁB
�������A���̃J���N���́A������ƈӒn���ł�����ǁA�j���_�҂ɋ����ďグ���
��Ԃ�Ȃ��ł����H�@�ނ�͂����炭�͊w�I�ȈӖ��͍l���܂���A���̂܂�܂�
�p�N���Đ������邩������Ȃ��ł��ˁB(������A�^�`���D�`)
>>281�u���ڂ̗��v���o�Ă�����Ă��Ƃ́A281��������㋣�Z������Ă������
���܂������H
�l�����܂��ˁB����Ŗ��ɂȂ�̂͗V�r�̎��ʂƁA�V�r�ȊO�̕����̎��ʂ̑傫����
�Ⴂ�ł��ˁB�u�g���N�v�Ƃ������ƂɂȂ�ƁA�������[�����g�̃A�[���̒�����������
���܂�����A�V�r�̎��ʂƗV�r�̉�]���a����o������g���N�̑傫���ŁA�V�r�ȊO��
�����̎��ʂ��ڒn�����獘�܂ł���]���a�Ƃ������̂��������H�Ƃ������ƂɂȂ�ƁA
�V�r�ȊO�̕����̎��ʂ����Ƃ��Ă��A�V�r���͂邩�ɑ傫���ł�����A�c�O�Ȃ���
����͓����Ȃ��A�ƁA�������ƂɂȂ�܂��ˁB
�������A���̃J���N���́A������ƈӒn���ł�����ǁA�j���_�҂ɋ����ďグ���
��Ԃ�Ȃ��ł����H�@�ނ�͂����炭�͊w�I�ȈӖ��͍l���܂���A���̂܂�܂�
�p�N���Đ������邩������Ȃ��ł��ˁB(������A�^�`���D�`)
>>281�u���ڂ̗��v���o�Ă�����Ă��Ƃ́A281��������㋣�Z������Ă������
���܂������H
287 �F95=101�F05/01/13 16:20:53 ID:3F22fi2X
268����̐̂̃O���[�v���̘b�Ƃ����̂́A����ς�u���_�d�S�̉^���𐅕��ʂɍS������v��
�u�����ʂɍS���v�ƁA�uZMP�̌Œ� �v�����ꂪ�����Ƃ̃M���b�v�ɂȂ�܂��ˁB
���́w�����ʁx�Ƃ����̂́A���́A���̐}���`����Ă����ʂ̂��Ƃł͂Ȃ��ł����H�@
�n�ʂƕ��s�̐����ʂ��Ƃ���ƁA�|���U�q�Ȃ�r���L�яk�݂��Ȃ��Ɩ����Șb�ɂȂ�܂�����ˁB
���̐}���`����Ă����ʂ𐅕��ʂƂ���ƁA���E�ɊԊu���L���{�̑��ŕ����ꍇ�ɂ́A
�ǂ����Ă����E�ɗh��Ȃ��Ɛڒn���̐^��ɏd�S�������Ă��邱�Ƃ��ł��܂���A
���́u�S���v���́A�s�\�ȑO��ɂȂ��Ă��܂��܂��ˁB
�ŁA���́uZMP�v�Ƃ������̂͑O�ɏo�����̑������̂��̂��낤�Ǝv���Ă܂������A ���̐^����
�ʉ߂��đ����n�ʂ𗣂�鐡�O�ł��uZMP�v���g����ł����H
>>284 ���d�͋�Ԃŋr��U������A�U�����̂Ɣ��̉�]���A�U�����r�ȊO�̕����ŋN�����ł����A
�S�̂ł͂قƂ�Ǔ������Ƃ͂Ȃ��ł��ˁB�u�G�r����v�݂����ɂȂ邾���ł��ˁB
�u�e�R�v�ł�����A�n�ʂɑ��������Ďx�_�ɂȂ�K�v�������ł���B
�c�������A�ǂ������d�͂Ƃ����C�����Ƃ���A�z�����Ă��܂��悤�Ȑ��������͂���Ă���悤�ł��ˁB
�c�������ƍH�v���˂B
���C�ɂ��ẮA�m���ɖ��C�Ɉˑ����Ȃ��ő����悤�ɂ͂Ȃ��Ă܂��B���̂����̏�ő�������
�����ł����A���ʂɃ_�b�V���ł��܂�����ˁB
�u�����ʂɍS���v�ƁA�uZMP�̌Œ� �v�����ꂪ�����Ƃ̃M���b�v�ɂȂ�܂��ˁB
���́w�����ʁx�Ƃ����̂́A���́A���̐}���`����Ă����ʂ̂��Ƃł͂Ȃ��ł����H�@
�n�ʂƕ��s�̐����ʂ��Ƃ���ƁA�|���U�q�Ȃ�r���L�яk�݂��Ȃ��Ɩ����Șb�ɂȂ�܂�����ˁB
���̐}���`����Ă����ʂ𐅕��ʂƂ���ƁA���E�ɊԊu���L���{�̑��ŕ����ꍇ�ɂ́A
�ǂ����Ă����E�ɗh��Ȃ��Ɛڒn���̐^��ɏd�S�������Ă��邱�Ƃ��ł��܂���A
���́u�S���v���́A�s�\�ȑO��ɂȂ��Ă��܂��܂��ˁB
�ŁA���́uZMP�v�Ƃ������̂͑O�ɏo�����̑������̂��̂��낤�Ǝv���Ă܂������A ���̐^����
�ʉ߂��đ����n�ʂ𗣂�鐡�O�ł��uZMP�v���g����ł����H
>>284 ���d�͋�Ԃŋr��U������A�U�����̂Ɣ��̉�]���A�U�����r�ȊO�̕����ŋN�����ł����A
�S�̂ł͂قƂ�Ǔ������Ƃ͂Ȃ��ł��ˁB�u�G�r����v�݂����ɂȂ邾���ł��ˁB
�u�e�R�v�ł�����A�n�ʂɑ��������Ďx�_�ɂȂ�K�v�������ł���B
�c�������A�ǂ������d�͂Ƃ����C�����Ƃ���A�z�����Ă��܂��悤�Ȑ��������͂���Ă���悤�ł��ˁB
�c�������ƍH�v���˂B
���C�ɂ��ẮA�m���ɖ��C�Ɉˑ����Ȃ��ő����悤�ɂ͂Ȃ��Ă܂��B���̂����̏�ő�������
�����ł����A���ʂɃ_�b�V���ł��܂�����ˁB
>>287
���[�ƁA�L�q���s�\�����Ƃ������ԈႢ���B
>�����Ŏ��_�d�S�̉^���𐅕��ʂɍS�������
��
>�����Ŏ��_�d�S�̉^����H�ʂƐ����Ȗʁi�H�ʂ�����̍��������j��ɍS�������
�łE�E�Eorz�B���ƁA���̓|���U�q�͋r�̒������ς������肵�܂B�����s�����X�}�\�
���̃��f����Sagital���ʁi������݂��ʂ��ȁj�Ɍ��������̂Ȃ̂�Lateral���ʁi���ʁi���j���猩���ʁj
�̉^���͎v�������薳�����Ă܂B�r�����ςƂ����͕̂G�̋��L�Ƃ����ȕւɑ�����Ƃ����Ȃ�ƁB
���̃A�v���[�`�ł͏������Ȃ�������@���g���������s���Ă��Ă�����x�̉��������ł��A
�����s���ł��Ă��܂��B���������Ƌ@�\�����̖��C�ŃV�~�����[�V�����ǂ���ɂ͂Ȃ�܂��A
�܂��A����͂���ŃA���H�Ƃ������ƂŁB�r�͏d�����A�Ƃ���1�{�����ˁ[��Ƃ��A
�ȗ����̕��Q���������Ȃ��������ł����A���̌����ł�ZMP�́u�����̈����S�i���菊�j�Ƃ��čl���A
������ł̈ʒu���삪�ł���v�Ƃ����v�z�Łu�d�S�̑���v������āA
���Ȃ��Ƃ����������������̃A�v���[�`�ŕ��s�炵�����̂��ł��鎖���m�F�����ƁB
ZMP�̒�`�Ƃ��A����ł���̂��Ƃ������c�_�͂܂��ʂ̘b�ɂȂ��Łi�E�́E�j�µ�IJÁB
>�ǂ������d�͂Ƃ����C�����Ƃ���A�z�����Ă��܂�
�H�w������݂�ƁA�͊w�I�ȍ�p����p�W�����Ă���悤���ƘA�z������
�L�q���ڗ�����ł͂Ȃ��ł����H�i�������������ȁE�E�E�H�j
>�n�ʂɑ��������Ďx�_�ɂȂ�K�v�������ł���B
���̎��_�ŘH�ʂƂ̃C���^���N�V�������m�肵�Ă����ł́H
�H��-����Ԃ̖��C��ˑ������s���Ă̂͐���゠�肪���������炯�Ȃ�ŁA
�W�J�Ƃ��Ă͔��ɂ������낢��ł���B���z�e�R�̗͊w�I�ȃ��W�b�N�m�Ɏ����Ȃ��ƁA
���̓_�͉��x�ł������Ԃ����͕̂K���Ǝv���B
���X�Ͽ�B
���[�ƁA�L�q���s�\�����Ƃ������ԈႢ���B
>�����Ŏ��_�d�S�̉^���𐅕��ʂɍS�������
��
>�����Ŏ��_�d�S�̉^����H�ʂƐ����Ȗʁi�H�ʂ�����̍��������j��ɍS�������
�łE�E�Eorz�B���ƁA���̓|���U�q�͋r�̒������ς������肵�܂B�����s�����X�}�\�
���̃��f����Sagital���ʁi������݂��ʂ��ȁj�Ɍ��������̂Ȃ̂�Lateral���ʁi���ʁi���j���猩���ʁj
�̉^���͎v�������薳�����Ă܂B�r�����ςƂ����͕̂G�̋��L�Ƃ����ȕւɑ�����Ƃ����Ȃ�ƁB
���̃A�v���[�`�ł͏������Ȃ�������@���g���������s���Ă��Ă�����x�̉��������ł��A
�����s���ł��Ă��܂��B���������Ƌ@�\�����̖��C�ŃV�~�����[�V�����ǂ���ɂ͂Ȃ�܂��A
�܂��A����͂���ŃA���H�Ƃ������ƂŁB�r�͏d�����A�Ƃ���1�{�����ˁ[��Ƃ��A
�ȗ����̕��Q���������Ȃ��������ł����A���̌����ł�ZMP�́u�����̈����S�i���菊�j�Ƃ��čl���A
������ł̈ʒu���삪�ł���v�Ƃ����v�z�Łu�d�S�̑���v������āA
���Ȃ��Ƃ����������������̃A�v���[�`�ŕ��s�炵�����̂��ł��鎖���m�F�����ƁB
ZMP�̒�`�Ƃ��A����ł���̂��Ƃ������c�_�͂܂��ʂ̘b�ɂȂ��Łi�E�́E�j�µ�IJÁB
>�ǂ������d�͂Ƃ����C�����Ƃ���A�z�����Ă��܂�
�H�w������݂�ƁA�͊w�I�ȍ�p����p�W�����Ă���悤���ƘA�z������
�L�q���ڗ�����ł͂Ȃ��ł����H�i�������������ȁE�E�E�H�j
>�n�ʂɑ��������Ďx�_�ɂȂ�K�v�������ł���B
���̎��_�ŘH�ʂƂ̃C���^���N�V�������m�肵�Ă����ł́H
�H��-����Ԃ̖��C��ˑ������s���Ă̂͐���゠�肪���������炯�Ȃ�ŁA
�W�J�Ƃ��Ă͔��ɂ������낢��ł���B���z�e�R�̗͊w�I�ȃ��W�b�N�m�Ɏ����Ȃ��ƁA
���̓_�͉��x�ł������Ԃ����͕̂K���Ǝv���B
���X�Ͽ�B
����A�����͗��㕔�ł��H�w���ł��Ȃ��ʂ肷����̎҂ł��B
50m��8�b3�ő��邭�炢�̃m���}�ł��B
���R���̃X���ǂ�ł݂Ă�����Ƌ����������̂ł��i��ɑ���������@�ɂ��āj�B
���������Ď������x���̂́A����Ƃ��ɒn�ʂ��R�邾�������炩�ȁH�Ǝv���܂��āB
�E���Œn�ʂ��R�遨���������n���R�遨���E�����n���R�遨��i�ȉ����j
�ł͂Ȃ��A
�E���Œn�ʂ��R�遨���������n���g�̂�O���ֈ����遨�R�遨���c
�Ȃ̂��ȁ`�A�Ȃ�āB
���̃X���I�ɂ͊W�Ȃ��ł��ˁB���݂܂���B
50m��8�b3�ő��邭�炢�̃m���}�ł��B
���R���̃X���ǂ�ł݂Ă�����Ƌ����������̂ł��i��ɑ���������@�ɂ��āj�B
���������Ď������x���̂́A����Ƃ��ɒn�ʂ��R�邾�������炩�ȁH�Ǝv���܂��āB
�E���Œn�ʂ��R�遨���������n���R�遨���E�����n���R�遨��i�ȉ����j
�ł͂Ȃ��A
�E���Œn�ʂ��R�遨���������n���g�̂�O���ֈ����遨�R�遨���c
�Ȃ̂��ȁ`�A�Ȃ�āB
���̃X���I�ɂ͊W�Ȃ��ł��ˁB���݂܂���B
290 �F95=101�F05/01/13 18:53:55 ID:3F22fi2X
���`�������̓��X�������ł��ˁ`�B281����A�����������̒x���l�𑬂�����̂��A���͎���
���ӕ���ł�����A���I�ɂ́uWelcome�I�v�Ȃ�ł��B�c���A���A�������B������
�X���Ⴂ�ł͂���܂��ˁB����ɂ͍s���Ă܂����H�@�����̗����Ȃ�Ă̂�m���Ă�ʂȂ�
�s���Ă��ł���ˁH�c�������A>>���n���g�̂�O���ֈ����遨�R�適����ȓ������
�ł��܂��H�@���́u���n��҂����ɋ���R��n�߂�v�Ƃ����̂��܂������Ă܂���B
268�����288�@�r�̒������ρH�@������B�܂�A�n�ʂɒ����Ă���r�̕G���Ȃ��L��
���Ȃ��������ł��ˁB�c��`�ސl���������A������ƃJ�c�R�����ł��ȁB�ł������Ă邼�A�ƁB
�ŁA���́u�H�ʂƂ̃C���^���N�V�������m�肵�Ă����ł́H�v���āA�ے肵�����ƂȂ��͂�
�Ȃ�ł����B�u�n�ʔ��͂͐��i�͂ɂȂ�Ȃ��v�Ƃ͂Ȃ�ׂ�ł������܂����A������Ƃ����āA
��p����p��ے肵�Ă��郏�P�ł͌����Ė����ł���B������g�R��낵��[�ɁB
�Ƃ����Ƃ���܂ŏ�������A���̘b�肪�����т܂����B��p����p�Ői�����Ƃ���ƁA�Ȃ�
��J����̂��H�@�܂���ŏ����܂��B
���ӕ���ł�����A���I�ɂ́uWelcome�I�v�Ȃ�ł��B�c���A���A�������B������
�X���Ⴂ�ł͂���܂��ˁB����ɂ͍s���Ă܂����H�@�����̗����Ȃ�Ă̂�m���Ă�ʂȂ�
�s���Ă��ł���ˁH�c�������A>>���n���g�̂�O���ֈ����遨�R�適����ȓ������
�ł��܂��H�@���́u���n��҂����ɋ���R��n�߂�v�Ƃ����̂��܂������Ă܂���B
268�����288�@�r�̒������ρH�@������B�܂�A�n�ʂɒ����Ă���r�̕G���Ȃ��L��
���Ȃ��������ł��ˁB�c��`�ސl���������A������ƃJ�c�R�����ł��ȁB�ł������Ă邼�A�ƁB
�ŁA���́u�H�ʂƂ̃C���^���N�V�������m�肵�Ă����ł́H�v���āA�ے肵�����ƂȂ��͂�
�Ȃ�ł����B�u�n�ʔ��͂͐��i�͂ɂȂ�Ȃ��v�Ƃ͂Ȃ�ׂ�ł������܂����A������Ƃ����āA
��p����p��ے肵�Ă��郏�P�ł͌����Ė����ł���B������g�R��낵��[�ɁB
�Ƃ����Ƃ���܂ŏ�������A���̘b�肪�����т܂����B��p����p�Ői�����Ƃ���ƁA�Ȃ�
��J����̂��H�@�܂���ŏ����܂��B
291 �F���J�����������F05/01/13 21:57:29 ID:z82VYT5s
�����Q�X���_
�s�s���ɃQ�X���͏W�����Ă�
����ɂ͗��R�������āA�s�s�ɂ͓�������̎Ⴂ�j���W�܂��Ă����Ȋw���Ƃ�
���R�A�s�s���ɂ͒j������ɂȂ�B
�s�s�͖����I�ȏ��s���Ȃ�
�����ɏZ��ł�j�͏������Ȃ��đ�ρB���̓E�n�E�n
���������Ƃ���ł����������̓^�J�r�[���E�Q�X���ƂȂ�
�ł��A�j�œ����ɏZ��ł邩����Ĕߊς��邱�Ƃ͂Ȃ�
�����ɏZ��ł���Ă��Ƃ͖����Q�X���ɒb�����Ă���Ă��Ƃ����炾
�����g���U�ň�Ԃ��Ă��͓̂����𗣂�Ă����̍�������
�����Q�X���ɒb�����Ă�����ȁB �n���̏��͏��_�Ɍ�����
�����瓌���Q�X���Ɋւ��ȂƁA������ƒn���ɍs��������ł��������͂���
�����Œb�����Ă�j�Ȃ�A���e���e�����
�u�s��������ċC���Ȃ����Ɓv
���ꂳ���A�C������Ώ��Ȃ�Ă�����ł�����Ă���
���̍l���Ɏ^������l�͂��̃X����F��ȂƂ��ɓ\��t���Ă���
����ŁA����ȏ㏗���Ƃ�̓����ɖ��d�Ȓj�����邱�Ƃ�h��������Ȃ����I�I
������������A�R�������ď㋞���Ă��鏗�̎q�������邩������Ȃ�����
���͗��ނ��I
�s�s���ɃQ�X���͏W�����Ă�
����ɂ͗��R�������āA�s�s�ɂ͓�������̎Ⴂ�j���W�܂��Ă����Ȋw���Ƃ�
���R�A�s�s���ɂ͒j������ɂȂ�B
�s�s�͖����I�ȏ��s���Ȃ�
�����ɏZ��ł�j�͏������Ȃ��đ�ρB���̓E�n�E�n
���������Ƃ���ł����������̓^�J�r�[���E�Q�X���ƂȂ�
�ł��A�j�œ����ɏZ��ł邩����Ĕߊς��邱�Ƃ͂Ȃ�
�����ɏZ��ł���Ă��Ƃ͖����Q�X���ɒb�����Ă���Ă��Ƃ����炾
�����g���U�ň�Ԃ��Ă��͓̂����𗣂�Ă����̍�������
�����Q�X���ɒb�����Ă�����ȁB �n���̏��͏��_�Ɍ�����
�����瓌���Q�X���Ɋւ��ȂƁA������ƒn���ɍs��������ł��������͂���
�����Œb�����Ă�j�Ȃ�A���e���e�����
�u�s��������ċC���Ȃ����Ɓv
���ꂳ���A�C������Ώ��Ȃ�Ă�����ł�����Ă���
���̍l���Ɏ^������l�͂��̃X����F��ȂƂ��ɓ\��t���Ă���
����ŁA����ȏ㏗���Ƃ�̓����ɖ��d�Ȓj�����邱�Ƃ�h��������Ȃ����I�I
������������A�R�������ď㋞���Ă��鏗�̎q�������邩������Ȃ�����
���͗��ނ��I
292 �F���J�����������F05/01/13 22:02:16 ID:3F22fi2X
�u�q���V�ł��c�v�̕ʃo�[�W�������ȁH
293 �F���J�����������F05/01/13 22:37:44 ID:vsASJUaz
������ƈႤ���B�A�C�{�͂������?�Ő��̏�ňꏏ�ɑ�������A
�K�i�������ĂQ�K�ɂ����肵�ė~�����̂ɁE�E�B
�K�i�������ĂQ�K�ɂ����肵�ė~�����̂ɁE�E�B
294 �F���J�����������F05/01/13 23:14:03 ID:zRsqnYrB
>>293
���������Ă�B�X���Ⴂ�Ȃ̂ŁA���ꌩ����A��B
�@����AIBO �F ttp://www.itmedia.co.jp/news/0204/05/running_aibo_m_3.html
�@�S��2 �F ttp://www.kimura.is.uec.ac.jp/students/fukuoka/research.html
���������Ă�B�X���Ⴂ�Ȃ̂ŁA���ꌩ����A��B
�@����AIBO �F ttp://www.itmedia.co.jp/news/0204/05/running_aibo_m_3.html
�@�S��2 �F ttp://www.kimura.is.uec.ac.jp/students/fukuoka/research.html
>>290
>�r�̕G���Ȃ��L�����Ȃ������
����A�����ڂł��������N���͎̂d���Ȃ��ł��B��������������w
�t�^���w�����ɂ͂���������Ȃ������������ŁB
�t�H�[�����ނ�����s�Ɋւ��͊w�������葁�������������Ă̂������̎�|�ł����B
>���́u�H�ʂƂ̃C���^���N�V�������m�肵�Ă����ł́H�v���āA�ے肵�����ƂȂ��͂�
����A�����
>�u�n�ʔ��͂͐��i�͂ɂȂ�Ȃ��v�Ƃ͂Ȃ�ׂ�ł������܂����A
�������炻���ς���Ɗ�����킯�ŁB
�u�n�ʔ��͂͐��i�͂ɂȂ�Ȃ��v���u�n�ʁi���鐂���j���͂͐��i�͂ɂȂ�Ȃ��v
�Ƃ����Ύ��Ɏ��R�ł����A���҂��H�ʂɋy�ڂ����͂͐������������łȂ�
���������ɂ���p����킯�ŁA����ɍR����`�ŐÖ��C�͂���p����B
���̑傫���͈̔͂ł���Α���͊��炸�A�܂������ɋr�@�\���o�R����
��̂ɓ����̗͂����͂Ƃ��č�p����Ɗς邱�Ƃ��ł���B
�܂�H�ʂɑ��đ��҂��y�ڂ��R��́A���͂͐��i�͂Ƃ��Ċ�^����̂ł�
�ƁA�ĎO�J��Ԃ���ł���B�Ⴆ����u�Ղ��v���ʂł��Ö��C�͂͐�����ł���H
�����̓n�b�L�������Ȃ��ƃ_���ł���A����ς�B
>��p����p�Ői�����Ƃ���ƁA�Ȃ���J����̂��H
�b�ցE�M�j�����[����Ŋy���݂ɂ��Ă܂�B
>�r�̕G���Ȃ��L�����Ȃ������
����A�����ڂł��������N���͎̂d���Ȃ��ł��B��������������w
�t�^���w�����ɂ͂���������Ȃ������������ŁB
�t�H�[�����ނ�����s�Ɋւ��͊w�������葁�������������Ă̂������̎�|�ł����B
>���́u�H�ʂƂ̃C���^���N�V�������m�肵�Ă����ł́H�v���āA�ے肵�����ƂȂ��͂�
����A�����
>�u�n�ʔ��͂͐��i�͂ɂȂ�Ȃ��v�Ƃ͂Ȃ�ׂ�ł������܂����A
�������炻���ς���Ɗ�����킯�ŁB
�u�n�ʔ��͂͐��i�͂ɂȂ�Ȃ��v���u�n�ʁi���鐂���j���͂͐��i�͂ɂȂ�Ȃ��v
�Ƃ����Ύ��Ɏ��R�ł����A���҂��H�ʂɋy�ڂ����͂͐������������łȂ�
���������ɂ���p����킯�ŁA����ɍR����`�ŐÖ��C�͂���p����B
���̑傫���͈̔͂ł���Α���͊��炸�A�܂������ɋr�@�\���o�R����
��̂ɓ����̗͂����͂Ƃ��č�p����Ɗς邱�Ƃ��ł���B
�܂�H�ʂɑ��đ��҂��y�ڂ��R��́A���͂͐��i�͂Ƃ��Ċ�^����̂ł�
�ƁA�ĎO�J��Ԃ���ł���B�Ⴆ����u�Ղ��v���ʂł��Ö��C�͂͐�����ł���H
�����̓n�b�L�������Ȃ��ƃ_���ł���A����ς�B
>��p����p�Ői�����Ƃ���ƁA�Ȃ���J����̂��H
�b�ցE�M�j�����[����Ŋy���݂ɂ��Ă܂�B
296 �F95=101�F05/01/15 15:19:50 ID:M/Y0Uywd
���͂Ői�ނƂȂ���J���邩�H�@����������Ɛ��m�Ɍ����c�u�l�Ԍ^�������s���{�b�g�ŁA
�n�ʔ��͂�B��̐��i�͂ƍl����ꍇ�́A���s���쐧��̍���̌������l�@����v�Ăȃg�R�ł��ȁB
�قƂ��256�����肩��̏����Ԃ��ɂȂ��ł����A�ڐV�����̂����傢�ƁB
�Y���͊m���ɒn�ʔ��͂��w�g�����x�ړ��ɈႢ�Ȃ��̂ŁA258�ŃY���ɂ���Ĉړ����Ă���ƌ����Ă�
����ɂ́A�n�ʔ��͂����i�͂ɑS���Ȃ�Ȃ��A�ƌ����Ă��܂��Ɩ������Ă�悤�ɂ��v���܂��ˁB
����͗���Z�����ő�������A�Ƃ��������̎��̃N�Z�ł��ˁB�u���͂ȂA�g���l�G���I�v��
�����������C���p�N�g������܂�����ˁB
�������A�Y���Ƃ����͍̂�p����p�̍�p�������ڏd�S�A���邢�͍ł����ʂ��傫�������ɍ�p����
����̂ł͂Ȃ��킯�ŁA�܂��A���{�b�g����̐l�������A�����̑����ɕ����Ă���u�Ԃ������
�u����v�Ƃ݂Ȃ��A�Ȃ�āA�u����ȁv��`�����Ă���̂Ɠ��l�Ɂu���i�͂́A���̂̏d�S��
��p�����ʂ�A���̕������ړ���������ƈ�v���Ă���ꍇ�Ɍ���v�ƁA�����������Ɂc����A
����͏���Ƃ������펯�̔��e�ɓ���͂��ł����ǂˁB������A�n�ʔ��͂𗘗p���Ĉړ����邱�Ƃ�
�\�ł��邪�A�n�ʔ��͂����ځA���i�͂ɂȂ��Ă���킯�ł͂Ȃ��A�ƁB����Ȃ̂łǂ��H
�n�ʔ��͂�B��̐��i�͂ƍl����ꍇ�́A���s���쐧��̍���̌������l�@����v�Ăȃg�R�ł��ȁB
�قƂ��256�����肩��̏����Ԃ��ɂȂ��ł����A�ڐV�����̂����傢�ƁB
�Y���͊m���ɒn�ʔ��͂��w�g�����x�ړ��ɈႢ�Ȃ��̂ŁA258�ŃY���ɂ���Ĉړ����Ă���ƌ����Ă�
����ɂ́A�n�ʔ��͂����i�͂ɑS���Ȃ�Ȃ��A�ƌ����Ă��܂��Ɩ������Ă�悤�ɂ��v���܂��ˁB
����͗���Z�����ő�������A�Ƃ��������̎��̃N�Z�ł��ˁB�u���͂ȂA�g���l�G���I�v��
�����������C���p�N�g������܂�����ˁB
�������A�Y���Ƃ����͍̂�p����p�̍�p�������ڏd�S�A���邢�͍ł����ʂ��傫�������ɍ�p����
����̂ł͂Ȃ��킯�ŁA�܂��A���{�b�g����̐l�������A�����̑����ɕ����Ă���u�Ԃ������
�u����v�Ƃ݂Ȃ��A�Ȃ�āA�u����ȁv��`�����Ă���̂Ɠ��l�Ɂu���i�͂́A���̂̏d�S��
��p�����ʂ�A���̕������ړ���������ƈ�v���Ă���ꍇ�Ɍ���v�ƁA�����������Ɂc����A
����͏���Ƃ������펯�̔��e�ɓ���͂��ł����ǂˁB������A�n�ʔ��͂𗘗p���Ĉړ����邱�Ƃ�
�\�ł��邪�A�n�ʔ��͂����ځA���i�͂ɂȂ��Ă���킯�ł͂Ȃ��A�ƁB����Ȃ̂łǂ��H
297 �F95=101�F05/01/15 15:24:37 ID:M/Y0Uywd
�ꉞ�A�}���A�b�v���Ă����܂����B
http://jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/vwp?.dir=/%a5%ed%a5%
dc%a5%c3%a5%c8%c1%f6%a4%ec&.dnm=%c3%cf%cc%cc%c8%bf%ce%cf%a4%cf.jpg&.
src=bc&.view=l&.done=http%3a//jp.y42.briefcase.yahoo.co.jp/bc/jjnby
475/lst%3f%26.dir=/%25a5%25ed%25a5%25dc%25a5%25c3%25a5%25c8%25c1%25
f6%25a4%25ec%26.src=bc%26.view=l
�d�S�A���邢�͍ł��傫�Ȏ��ʂ��������𐄐i�͂̍�p�����ʂ��Ă��Ȃ��ꍇ�A259�Ō������A
�w�Y���G���m�̓����x�œ����Ă���ꍇ�ɂ́A�ό`���Ȃ��A���邢�͕ό`���ɂ��������m��
���������܂܂Łu�����v���Ȃ��瓮���Ă���悤�Ȃ��̂ł�����A�K�v�ȃ��X������
�����ɂ����ƌ����܂��B�s�v�ȓ��������̂܂ܓ`����Ă��܂��킯�ł��B�s�v�ȓ��������̂܂�
�`����Ă��A�傫�Ȋ������[�����g�����������̂ɓ`������̂Ȃ�A���X�ł������ł����A
�l�Ԍ^�������s���{�b�g�̏ꍇ�A�傫�Ȋ������[�����g������̂́A�Ҋ߂����̕�����
�t���U��q�̂悤�ɗh�炷�^�������Ƃ������ƂɂȂ�܂��B���ۂɁA�Ҋ߂���オ��������
�h��Ȃ�������Ă��郍�{�b�g�͌������܂���A���X�͂��܂������������Ă���̂ł����A
�{���Ƀ��X���Ă���̂��ƌ����A�����炭�����ł͂Ȃ��āA�r�̕��ɖ߂��Ă��Ă���͂�
�Ȃ�ł���B�Ƃ������Ƃ́A�r�Ő������u�s�v�ȗ́v�́A���ǂ́A�r�Ń��X�����Ȃ���Ȃ�Ȃ�
�Ƃ������ƂŁA����͊߂̍\����N�b�V�����ŋz�������Ă���͂��ł��B�p�Ȃ����r����
�O�����Ń��X�����邱�Ƃ��ł��܂�����A�r�̘p�Ȃ�ZMP�̂��߂����ł͂Ȃ����ʂ�����킯�ł��B
�g���^�́A�r���܂������Ȋy�c���{�b�g�́A�̂̃I���`���̂悤�ȏ��҂̂��葫�ł����A�r��
�܂������Ȃ�A���ꂭ�炢�̓��������ł��Ȃ��Ƃ������Ƃł��ˁB
http://jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/vwp?.dir=/%a5%ed%a5%
dc%a5%c3%a5%c8%c1%f6%a4%ec&.dnm=%c3%cf%cc%cc%c8%bf%ce%cf%a4%cf.jpg&.
src=bc&.view=l&.done=http%3a//jp.y42.briefcase.yahoo.co.jp/bc/jjnby
475/lst%3f%26.dir=/%25a5%25ed%25a5%25dc%25a5%25c3%25a5%25c8%25c1%25
f6%25a4%25ec%26.src=bc%26.view=l
�d�S�A���邢�͍ł��傫�Ȏ��ʂ��������𐄐i�͂̍�p�����ʂ��Ă��Ȃ��ꍇ�A259�Ō������A
�w�Y���G���m�̓����x�œ����Ă���ꍇ�ɂ́A�ό`���Ȃ��A���邢�͕ό`���ɂ��������m��
���������܂܂Łu�����v���Ȃ��瓮���Ă���悤�Ȃ��̂ł�����A�K�v�ȃ��X������
�����ɂ����ƌ����܂��B�s�v�ȓ��������̂܂ܓ`����Ă��܂��킯�ł��B�s�v�ȓ��������̂܂�
�`����Ă��A�傫�Ȋ������[�����g�����������̂ɓ`������̂Ȃ�A���X�ł������ł����A
�l�Ԍ^�������s���{�b�g�̏ꍇ�A�傫�Ȋ������[�����g������̂́A�Ҋ߂����̕�����
�t���U��q�̂悤�ɗh�炷�^�������Ƃ������ƂɂȂ�܂��B���ۂɁA�Ҋ߂���オ��������
�h��Ȃ�������Ă��郍�{�b�g�͌������܂���A���X�͂��܂������������Ă���̂ł����A
�{���Ƀ��X���Ă���̂��ƌ����A�����炭�����ł͂Ȃ��āA�r�̕��ɖ߂��Ă��Ă���͂�
�Ȃ�ł���B�Ƃ������Ƃ́A�r�Ő������u�s�v�ȗ́v�́A���ǂ́A�r�Ń��X�����Ȃ���Ȃ�Ȃ�
�Ƃ������ƂŁA����͊߂̍\����N�b�V�����ŋz�������Ă���͂��ł��B�p�Ȃ����r����
�O�����Ń��X�����邱�Ƃ��ł��܂�����A�r�̘p�Ȃ�ZMP�̂��߂����ł͂Ȃ����ʂ�����킯�ł��B
�g���^�́A�r���܂������Ȋy�c���{�b�g�́A�̂̃I���`���̂悤�ȏ��҂̂��葫�ł����A�r��
�܂������Ȃ�A���ꂭ�炢�̓��������ł��Ȃ��Ƃ������Ƃł��ˁB
298 �F95=101�F05/01/15 15:31:17 ID:M/Y0Uywd
��������`�A����ς�}�̃A�h���X�͒������Ă܂Ƃ��ɕ\������܂���ˁB
�R�s�y�ł�����Ƃ͎v���܂����B
�ڒn���Ă��鑫�ɂ́A���������u�\��v�������Ă���킯�ŁA�ڒn���ɖ\�ꂪ
�`����Ă���ꍇ�A���̗��̖��C�͏펞���ł͂Ȃ��ł��ˁB�p���͈��ɐ���
���Ă��Ă��A�킸���ɃO�������Ƃő��̗��ɂ����鈳�͂̓x���������ׂĂ�
�ς���Ă��܂��B������ɘa����ɂ́A�ڒn���̖ʂ����肳����K�v������܂��B
����ɂ͂R�_�Ŗʂ����̂��L���Ȃ͂��ł��B�l�̂̓J�J�g�ƕ�w���Ə��w�̕t������
�R�_�A�J�J�g�����������ɂ͐e�w�ƕ�w���Ə��w�̕t�����łR�_���`������Ă��܂��B
����Ɠ����悤�ɒn�ʂ̏�ԁA�ڒn���̎p���ɍ��킹�ĂR�_��\���I�Ɍ`������
�J���N�����K�v�ɂȂ�ł��傤�B
�R�s�y�ł�����Ƃ͎v���܂����B
�ڒn���Ă��鑫�ɂ́A���������u�\��v�������Ă���킯�ŁA�ڒn���ɖ\�ꂪ
�`����Ă���ꍇ�A���̗��̖��C�͏펞���ł͂Ȃ��ł��ˁB�p���͈��ɐ���
���Ă��Ă��A�킸���ɃO�������Ƃő��̗��ɂ����鈳�͂̓x���������ׂĂ�
�ς���Ă��܂��B������ɘa����ɂ́A�ڒn���̖ʂ����肳����K�v������܂��B
����ɂ͂R�_�Ŗʂ����̂��L���Ȃ͂��ł��B�l�̂̓J�J�g�ƕ�w���Ə��w�̕t������
�R�_�A�J�J�g�����������ɂ͐e�w�ƕ�w���Ə��w�̕t�����łR�_���`������Ă��܂��B
����Ɠ����悤�ɒn�ʂ̏�ԁA�ڒn���̎p���ɍ��킹�ĂR�_��\���I�Ɍ`������
�J���N�����K�v�ɂȂ�ł��傤�B
299 �F���J�����������F05/01/15 16:30:58 ID:3GYUqEJM
>>95=101
���z�e�R�̐}������ł����A�^���G�l���M�[���悭������Ȃ��_�ŕ\����Ă�B
���_�Ŏ����ɂ͗����ł��܂���ł����B�{���ɋr���̂��̂ł͂Ȃ�
�^���G�l���M�[�Ȃ�ł����H
���Ȃ݂�"�������̕��i�̘A����"�ō\������镨�̂̉^���͊w����������
�͊w�̖{�Ȃ��̍ڂ��Ă�Ǝv���܂����B
���z�e�R�̐}������ł����A�^���G�l���M�[���悭������Ȃ��_�ŕ\����Ă�B
���_�Ŏ����ɂ͗����ł��܂���ł����B�{���ɋr���̂��̂ł͂Ȃ�
�^���G�l���M�[�Ȃ�ł����H
���Ȃ݂�"�������̕��i�̘A����"�ō\������镨�̂̉^���͊w����������
�͊w�̖{�Ȃ��̍ڂ��Ă�Ǝv���܂����B
300 �F���J�����������F05/01/15 17:21:37 ID:eQLItZuR
�X�L�[�W�����v���Ďv�������A
�X�L�[�W�����v�ł��郍�{�b�g���ł��āA
���߂Ęb�ɂȂ�Ǝv�����B
�X�L�[�W�����v�ł��郍�{�b�g���ł��āA
���߂Ęb�ɂȂ�Ǝv�����B
301 �F95=101�F05/01/15 21:07:18 ID:M/Y0Uywd
���z�e�R�̐}�������H�@����J�t�H���_�ɓ����Ă�̂ɁH�@��������[�B�ǂ��Ȃ��Ă�ȁH
�܂��A�ꉞ�A����͂�����ʂ̂Ɓu���킹���U�v�ɂȂ��Ă܂�����A�e�R�̐}�������Ă�
�����Ƃ͎v���܂����A�z��O�̃g�R�ŗ���s�\�ɂȂ��Ă���ł��ˁB
���̖_���^���G�l���M�[�Ƃ���̂��Ó����ǂ����H�́A1992�N�ɍl���������猋�_���o���Ȃ�
�܂܂�10���N�����Ă����Ă��܂��B���p�̓���ɂ��邱�Ƃ���l���Ă��܂�������B
�ŁA���ۂ̓���ł͋r���̂��̂ł��B��������ƂɁA�����̎��R�ȓ���ӎ��u�n�ʂ��R��v��
�߂�����ŁA���̃��J�j�Y�����͂��炭����������Ƃ������Ƃ���������ł����B
�u�w���������̗͊w�̖{�v�ɍڂ��Ă���̂́A�l�Ԃ̂悤�Ɏ��͂œ������Ƃ��郂�m�ł������H
���ׂĊO�͂ɂ��^���ł͂Ȃ������ł����H
�܂��A�ꉞ�A����͂�����ʂ̂Ɓu���킹���U�v�ɂȂ��Ă܂�����A�e�R�̐}�������Ă�
�����Ƃ͎v���܂����A�z��O�̃g�R�ŗ���s�\�ɂȂ��Ă���ł��ˁB
���̖_���^���G�l���M�[�Ƃ���̂��Ó����ǂ����H�́A1992�N�ɍl���������猋�_���o���Ȃ�
�܂܂�10���N�����Ă����Ă��܂��B���p�̓���ɂ��邱�Ƃ���l���Ă��܂�������B
�ŁA���ۂ̓���ł͋r���̂��̂ł��B��������ƂɁA�����̎��R�ȓ���ӎ��u�n�ʂ��R��v��
�߂�����ŁA���̃��J�j�Y�����͂��炭����������Ƃ������Ƃ���������ł����B
�u�w���������̗͊w�̖{�v�ɍڂ��Ă���̂́A�l�Ԃ̂悤�Ɏ��͂œ������Ƃ��郂�m�ł������H
���ׂĊO�͂ɂ��^���ł͂Ȃ������ł����H
302 �F���J�����������F05/01/15 23:16:04 ID:3GYUqEJM
>>301
�l�Ԃ̂悤�Ɏ��͂œ������Ƃ��郂�m�ɂ��ď�����Ă�{�͂��������
�v���܂����B�悭����̂����{�b�g�A�[���Ƃ��ł����ˁB
�l�Ԃ̂悤�Ɏ��͂œ������Ƃ��郂�m�ɂ��ď�����Ă�{�͂��������
�v���܂����B�悭����̂����{�b�g�A�[���Ƃ��ł����ˁB
303 �F95=101�F05/01/16 05:43:55 ID:8n9hQWsV
���A���{�b�g�A�[���ł����B���d�U��q�Ƃ��o�Ă����ł��傤�ˁB
�d�S�̈����ɂ��Ă͊e�������Ƃɏd�S�ʒu�̓���ƑS�̂̏d�S�ʒu�̓���Ƃ�
�g�������Ă��ł��傤�ˁH�@
�����Y��Ă܂������A���z�e�R���l�������ɂ́A���肾�����Ώۂł�������A
���z�͓_�ɂ�����V�r�́A�O�ɏo�鎞�Ɉ�U�܂��܂�āA�܂��L�тĂ������̂ŁA
�r�S�̂̏d�S�̈ʒu���ω����邱�Ƃ��A�r���̂��̂Ƃ͂��Ȃ��������@������
�̂ł����B
�d�S�̈����ɂ��Ă͊e�������Ƃɏd�S�ʒu�̓���ƑS�̂̏d�S�ʒu�̓���Ƃ�
�g�������Ă��ł��傤�ˁH�@
�����Y��Ă܂������A���z�e�R���l�������ɂ́A���肾�����Ώۂł�������A
���z�͓_�ɂ�����V�r�́A�O�ɏo�鎞�Ɉ�U�܂��܂�āA�܂��L�тĂ������̂ŁA
�r�S�̂̏d�S�̈ʒu���ω����邱�Ƃ��A�r���̂��̂Ƃ͂��Ȃ��������@������
�̂ł����B
304 �F���J�����������F05/01/16 05:57:09 ID:XLxswuMn
�u���i�͂ɂȂ�Ȃ��v�̐}��������ł����A�l�Ԃ��r���R��ʒu��
�̂̌�낾�����p���͏d�S��ʂ�Ǝv����ł����A�ǂ��ł��傤�B
���������}�Ő�������Ă��A�ȂႤ��Ȃ����Ǝv���Ă��܂��܂��B
ttp://www.otsuka.co.jp/pia/img/runner/kihon_p_01.gif
ttp://www.sports-n.com/s_run/img/1101ilst.gif
ttp://www.sports-n.com/s_run/htm/1102-j.htm
�̂̌�낾�����p���͏d�S��ʂ�Ǝv����ł����A�ǂ��ł��傤�B
���������}�Ő�������Ă��A�ȂႤ��Ȃ����Ǝv���Ă��܂��܂��B
ttp://www.otsuka.co.jp/pia/img/runner/kihon_p_01.gif
{kind=link}
ttp://www.sports-n.com/s_run/img/1101ilst.gif
{kind=link}
ttp://www.sports-n.com/s_run/htm/1102-j.htm
305 �F95=101�F05/01/16 09:01:35 ID:8n9hQWsV
>>304.�@�m���ɂ��������^��͂킭�ł��傤�ˁB����p�̍�p��������ʂ邽�߂ɂ́A
���́u��p�v�̕��̗͍͂�����o�Ă��Ȃ��Ƃ����Ȃ���ł���B�@
MIT�̃s�����s�����N���Q���A���́u���͂̍�p�������ɓ��B���Ă���v��ł��B
http://www.ai.mit.edu/projects/leglab/robots/3D_biped/3D_biped_flip.mpeg
���̋r�̃A�N�V�����́A������O�֒����I�ɋr���L�яk�݂�����̂ŁA��X����낤��
����ƁA���n������G���Ȃ��āA���̐^���𑫂��ʉ߂�����A������ڒn���Ă��鑫��
�����I�ɗ͂��o��悤�ɂ��ĉ�����ł��B����Ă݂ĉ������B������A�G�����߂܂���B
���ʂ̃i�}�g�̐l�Ԃ͍����璼���I�ɉ����o���̂ł͂Ȃ��A�n�ʂ�O������֏R��킯�ŁA
�����������ɕG�̋Ȃ��L���Őڒn���������璼���I�ɉ����o���̂͂��Ȃ�������ł�
���AMIT�̂悤�ȃ��{�b�g�����Ή\�ł��B�������A���ʂƂ��Ă͂���ȃs�����s�������т�
�Ȃ�܂��B���̃��{�b�g�͂������������Ƃ͂ł��Ȃ���ł����A���̃s�����s�������т�
�u�l�Ԃ炵�������s�v�ƌĂԂ��ǂ��������ł��ˁB
�R�Љ�Ă��ꂽ�y�[�W�̓��A�ŏ��̂́u����Ă͂����Ȃ�������v�̗�ł��B����Ȃ�
�S�`���S�`���C�����Ȃ��瑖��ȂǂƂ����͎̂w���҂Ƃ��ăV���E�g�A���S�҂�������
�o�Ȃ���̕��ł��B�R�Ԗڂ̂��u�����}���}�v�������Ă���ɉ߂��Ȃ����̂ŁA�����
�w���Ҍ����҂̃��x���̒Ⴓ���}�U�}�U�ƌ����t��������̂ł��B
���́u��p�v�̕��̗͍͂�����o�Ă��Ȃ��Ƃ����Ȃ���ł���B�@
MIT�̃s�����s�����N���Q���A���́u���͂̍�p�������ɓ��B���Ă���v��ł��B
http://www.ai.mit.edu/projects/leglab/robots/3D_biped/3D_biped_flip.mpeg
���̋r�̃A�N�V�����́A������O�֒����I�ɋr���L�яk�݂�����̂ŁA��X����낤��
����ƁA���n������G���Ȃ��āA���̐^���𑫂��ʉ߂�����A������ڒn���Ă��鑫��
�����I�ɗ͂��o��悤�ɂ��ĉ�����ł��B����Ă݂ĉ������B������A�G�����߂܂���B
���ʂ̃i�}�g�̐l�Ԃ͍����璼���I�ɉ����o���̂ł͂Ȃ��A�n�ʂ�O������֏R��킯�ŁA
�����������ɕG�̋Ȃ��L���Őڒn���������璼���I�ɉ����o���̂͂��Ȃ�������ł�
���AMIT�̂悤�ȃ��{�b�g�����Ή\�ł��B�������A���ʂƂ��Ă͂���ȃs�����s�������т�
�Ȃ�܂��B���̃��{�b�g�͂������������Ƃ͂ł��Ȃ���ł����A���̃s�����s�������т�
�u�l�Ԃ炵�������s�v�ƌĂԂ��ǂ��������ł��ˁB
�R�Љ�Ă��ꂽ�y�[�W�̓��A�ŏ��̂́u����Ă͂����Ȃ�������v�̗�ł��B����Ȃ�
�S�`���S�`���C�����Ȃ��瑖��ȂǂƂ����͎̂w���҂Ƃ��ăV���E�g�A���S�҂�������
�o�Ȃ���̕��ł��B�R�Ԗڂ̂��u�����}���}�v�������Ă���ɉ߂��Ȃ����̂ŁA�����
�w���Ҍ����҂̃��x���̒Ⴓ���}�U�}�U�ƌ����t��������̂ł��B
>>304�̈�Ԗڂ̂̓W���M���O�̑��@�̂悤�ȋC������B
�u��葬�����邽�߂̑��@�v�ł͂Ȃ��B
>>297�̐^���̐l��O�X�p���Ƃ点��ƁA�d�S���O���Ɉړ����A
���̌��̌`�ɋ߂��Ȃ�̂ł́H>>304�̎O�Ԗڂ̃��[���X�̑��@��
�����Ȃ�Ȃ��������H
�u��葬�����邽�߂̑��@�v�ł͂Ȃ��B
>>297�̐^���̐l��O�X�p���Ƃ点��ƁA�d�S���O���Ɉړ����A
���̌��̌`�ɋ߂��Ȃ�̂ł́H>>304�̎O�Ԗڂ̃��[���X�̑��@��
�����Ȃ�Ȃ��������H
307 �F���J���������� �F05/01/16 11:32:39 ID:kHawXpKC
>>95=101
���͂͐��i�͂ɂȂ�Ȃ��A�̐}�ł����AZMP�ƍl�����͓����ł����ˁH
�m���ɐ}�ł͍�p�����d�S��ʂ��Ă܂��A���ۂ͂���������Əd�͐�����
�傫���A�����ĉ������͑O�X�p�����Ƃ�̂ŁA
��p���͏d�S�t�߂�ʂ�Ǝv���܂��BMAX���x�ł͔��͂̐���������
���Ȃ菭�Ȃ��̂ŁA��p���͂قƂ�ǒn�ʂɐ������Ǝv���܂��B
���͂͐��i�͂ɂȂ�Ȃ��A�̐}�ł����AZMP�ƍl�����͓����ł����ˁH
�m���ɐ}�ł͍�p�����d�S��ʂ��Ă܂��A���ۂ͂���������Əd�͐�����
�傫���A�����ĉ������͑O�X�p�����Ƃ�̂ŁA
��p���͏d�S�t�߂�ʂ�Ǝv���܂��BMAX���x�ł͔��͂̐���������
���Ȃ菭�Ȃ��̂ŁA��p���͂قƂ�ǒn�ʂɐ������Ǝv���܂��B
308 �F95=101�F05/01/16 13:10:54 ID:8n9hQWsV
>>306��281�@304�̑���́u�s���}���\���v���x���ł��傤�ˁB�ł��܂��W���M���O��
���x���ł����Ă��A�y���܂��̑O�̕����ɏ�ɏd�S���悹�Ȃ���J�J�g���璅���A
�Ȃ�Ă��Ƃ��������c�͎��A�L���C�ł���B
304�̂l.�O���[���Ƃb.���C�X�̉�́A�ǖʂ�����Ă��܂��B�O���[���͉̂������ŁA
���C�X�̂͒��Ոȍ~�̉�ł��ˁB���C�X���}�W��100���̃��[�X�𑖂鎞�̉������̎p����
�L�w�C���Ŏ����͂܂������ł����A���͏����Ⴍ���Ă��܂��B�c�����H�@���ꂶ��
����݂����ł��ˁB�܁A�G�G���B
�l.�O���[���́u���@�v�ƌ����Ă�����͉������̎p���ŁA���Ԏ����ɂȂ����王����
�܂������O�Ɍ�����̂����A�O�X�������ƐȂ�܂��B�l.�O���[���́A������������������
����������Ƃ�����܂����A�����������ɂ͋L�^�̓p�b�Ƃ��Ȃ������ł��ˁB
���x���ł����Ă��A�y���܂��̑O�̕����ɏ�ɏd�S���悹�Ȃ���J�J�g���璅���A
�Ȃ�Ă��Ƃ��������c�͎��A�L���C�ł���B
304�̂l.�O���[���Ƃb.���C�X�̉�́A�ǖʂ�����Ă��܂��B�O���[���͉̂������ŁA
���C�X�̂͒��Ոȍ~�̉�ł��ˁB���C�X���}�W��100���̃��[�X�𑖂鎞�̉������̎p����
�L�w�C���Ŏ����͂܂������ł����A���͏����Ⴍ���Ă��܂��B�c�����H�@���ꂶ��
����݂����ł��ˁB�܁A�G�G���B
�l.�O���[���́u���@�v�ƌ����Ă�����͉������̎p���ŁA���Ԏ����ɂȂ����王����
�܂������O�Ɍ�����̂����A�O�X�������ƐȂ�܂��B�l.�O���[���́A������������������
����������Ƃ�����܂����A�����������ɂ͋L�^�̓p�b�Ƃ��Ȃ������ł��ˁB
309 �F95=101�F05/01/16 13:22:48 ID:8n9hQWsV
>>307 ����ZMP�̍l�����Ƃ����̂�S�R�m�����̂ŁA�������ǂ����͉��肩�˂܂��B
�ǂ�����ZMP�̏ڂ��������͂���܂������H
>>���ۂ͂���������Əd�͐������傫���A�����ĉ������͑O�X�p�����Ƃ�̂ŁA
>>��p���͏d�S�t�߂�ʂ�Ǝv���܂��BMAX���x�ł͔��͂̐��������͂��Ȃ菭�Ȃ��̂ŁA
>>��p���͂قƂ�ǒn�ʂɐ������Ǝv���܂��B
����͐l�Ԃ̑���̏ꍇ�A���̒ʂ�Ȃ�ł����A�Ƃ������Ƃ͉��������u���i�́v���قƂ��
�����āAMAX���x�ł͐��i�͂��S�R�����Ƃ������ƂɂȂ�܂��B
�ǂ�����ZMP�̏ڂ��������͂���܂������H
>>���ۂ͂���������Əd�͐������傫���A�����ĉ������͑O�X�p�����Ƃ�̂ŁA
>>��p���͏d�S�t�߂�ʂ�Ǝv���܂��BMAX���x�ł͔��͂̐��������͂��Ȃ菭�Ȃ��̂ŁA
>>��p���͂قƂ�ǒn�ʂɐ������Ǝv���܂��B
����͐l�Ԃ̑���̏ꍇ�A���̒ʂ�Ȃ�ł����A�Ƃ������Ƃ͉��������u���i�́v���قƂ��
�����āAMAX���x�ł͐��i�͂��S�R�����Ƃ������ƂɂȂ�܂��B
310 �F95=101�F05/01/17 18:18:50 ID:wn6xpTbd
���r���[�Ń��X���I����Ă܂����B
�n�ʂ���̔��͂̍�p��������ʂ�ꍇ�ɂ́A���͂̐����������قƂ�ǖ����A�܂�
���i�͂��قƂ�ǖ����A�Ƃ������ƂɂȂ��ł����A���́uMAX���x�Ő��i�͂�����
�Ȃ��Ă��܂��v�Ƃ������Ƃ��A���{�̒Z�����I��̑��������[�X���Ղ����肩��
�K�^�b�Ǝ������Ă��܂��Ƃ����w���ہx�̌����ŁA�ŋ߂́u�n�ʂ��R��Ȃ��v��
�����悤�ɂȂ��āA�悤�₭���E�Ɂu������Ƃ����v�ǂ����Ă����Ƃ������Ƃ�
�Ȃ��Ă��Ă��܂��B
���������u����v���N���邱�Ƃ��A�����u�n�ʔ��͂͐��i�͂ɂȂ�Ȃ��v��
�����Ă闝�R�̈�ł����B�Y��Ă܂�����B307����A���肪�Ƃ��B
�u��������ɂ͒n�ʔ��͂ɂ�鐄�i�͂͌�������������v�Ƃ������Ă���ł����B
MAX���x�łȂ���A�O�X���邱�ƂŁA���͂𐄐i�͂ɂ��Ă��Ă������͏�����
�ǂ��Ȃ�܂��B
MIT�́u�G�̂���N���Q�v�̕��́A����O�ɌX���đ����Ă��܂����A���̎p���Ȃ�
���\�i�ރ��P�ł��ˁB
�n�ʂ���̔��͂̍�p��������ʂ�ꍇ�ɂ́A���͂̐����������قƂ�ǖ����A�܂�
���i�͂��قƂ�ǖ����A�Ƃ������ƂɂȂ��ł����A���́uMAX���x�Ő��i�͂�����
�Ȃ��Ă��܂��v�Ƃ������Ƃ��A���{�̒Z�����I��̑��������[�X���Ղ����肩��
�K�^�b�Ǝ������Ă��܂��Ƃ����w���ہx�̌����ŁA�ŋ߂́u�n�ʂ��R��Ȃ��v��
�����悤�ɂȂ��āA�悤�₭���E�Ɂu������Ƃ����v�ǂ����Ă����Ƃ������Ƃ�
�Ȃ��Ă��Ă��܂��B
���������u����v���N���邱�Ƃ��A�����u�n�ʔ��͂͐��i�͂ɂȂ�Ȃ��v��
�����Ă闝�R�̈�ł����B�Y��Ă܂�����B307����A���肪�Ƃ��B
�u��������ɂ͒n�ʔ��͂ɂ�鐄�i�͂͌�������������v�Ƃ������Ă���ł����B
MAX���x�łȂ���A�O�X���邱�ƂŁA���͂𐄐i�͂ɂ��Ă��Ă������͏�����
�ǂ��Ȃ�܂��B
MIT�́u�G�̂���N���Q�v�̕��́A����O�ɌX���đ����Ă��܂����A���̎p���Ȃ�
���\�i�ރ��P�ł��ˁB
311 �F���J�����������F05/01/18 01:39:37 ID:Dr6PM1tv
�ǂ����X�T��ASIMO��QRIO�́u���s�v�̃X�s�[�h���o�Ȃ��̂�
�d�S�Ƒ��̈ʒu�W�̂������Ǝv������ł�̂ł͂Ȃ���
����ł��̑�Ƃ��Ď������[�ւ������̂ł͂Ȃ����Ǝv����B
�����������_�ōł��l�b�N�ƂȂ��Ă���̂�
�r�̃p���[����уX�s�[�h�����܂�ɕs�����Ă��邽�߂�
���̉^���\�͂̂قƂ�ǂ�����̎����ɐU�蕪�������
���Ȃ��Ƃ����_�ł���B
���s�p����d�S�Ƃ̈ʒu�W�A�����đS�̂̊p�^���ʂ̃R���g���[��
�Ȃ͊��ɑ��s�̎����̏�ŐD�荞�܂�Ă���ƌ���̂��Ó����낤�B
���ۊ߂̏o�͂����������傫�����肷���
��������n�����̂܂ܓK�p���邾����
���Ȃ�̃X�s�[�h�ő��s�\�ł���Ƃ����V�~�����[�V�������ʂ�
���\�������B
�d�S�Ƒ��̈ʒu�W�̂������Ǝv������ł�̂ł͂Ȃ���
����ł��̑�Ƃ��Ď������[�ւ������̂ł͂Ȃ����Ǝv����B
�����������_�ōł��l�b�N�ƂȂ��Ă���̂�
�r�̃p���[����уX�s�[�h�����܂�ɕs�����Ă��邽�߂�
���̉^���\�͂̂قƂ�ǂ�����̎����ɐU�蕪�������
���Ȃ��Ƃ����_�ł���B
���s�p����d�S�Ƃ̈ʒu�W�A�����đS�̂̊p�^���ʂ̃R���g���[��
�Ȃ͊��ɑ��s�̎����̏�ŐD�荞�܂�Ă���ƌ���̂��Ó����낤�B
���ۊ߂̏o�͂����������傫�����肷���
��������n�����̂܂ܓK�p���邾����
���Ȃ�̃X�s�[�h�ő��s�\�ł���Ƃ����V�~�����[�V�������ʂ�
���\�������B
312 �F���J�����������F05/01/18 01:58:51 ID:Dr6PM1tv
�NjL
MIT��3D-biped���i�C�悭�u�����āv����̂�
�r�̕t�������d�S�̋߂��ɂ��邩��ł͂Ȃ�
�r�̃V�����_�[���o�l�v�f������Ă��邽�߂�
�p���[�̖�肪�y������Ă��邩��ɂ����܂���B
MIT��3D-biped���i�C�悭�u�����āv����̂�
�r�̕t�������d�S�̋߂��ɂ��邩��ł͂Ȃ�
�r�̃V�����_�[���o�l�v�f������Ă��邽�߂�
�p���[�̖�肪�y������Ă��邩��ɂ����܂���B
313 �F���J�����������F05/01/18 09:50:59 ID:jzHT3zHm
�R�P�P�͒��w�����炢���H�@���{�b�g�͐��g�̐l�ԂƂ͈Ⴄ���B
>>�r�̃p���[����уX�s�[�h�����܂�ɕs�����Ă��邽�߂�
���̉^���\�͂̂قƂ�ǂ�����̎����ɐU�蕪�������
���Ȃ��Ƃ����_�ł���B
�q�ǂ����܂����������瑫�̃p���[�������Ƃ����̂Ȃ�킩�邪
�l�H�̎Y���Ńp���[�s���ȂǂƂ������Ƃ͖������B������ł�����
�ł���B��������킯�ɂ͂����Ȃ����狭���ł��Ȃ���B
>>���ۊ߂̏o�͂����������傫�����肷��Γ�������n��
���̂܂ܓK�p���邾���ł��Ȃ�̃X�s�[�h�ő��s�\�ł���
�Ƃ����V�~�����[�V�������ʂ����\����Ă���B
����Ȕ��\�ɂ͐M�ߐ��͖������B���\�����葢�������B
���\���S����������Ȃ�A���āu�Q�����s�͕s�\�v�Ɣ��\����
�̂͂ǂ��Ȃ�H
�R�P�Q��MIT��3D-biped���A�r�̕t�������d�S�̋߂���
���邩��łȂ�������A�Ȃ�ł���Ȍ`�ɂ���K�v������H
���O�̂��X�T���̂����u�ے�̂��߂̔ے�v�Ȃ낤��B
������X�T���ɕ����������A����̌f���́A
http://www.namiashi.com/hihoukan/cgi-bin/bbs/basic_b.cgi
������No.657�̃��X�ɏ����Ă��邱�Ƃ����Ăǂ��v����H�@
��ڎl���̋؊������ҊߊO�]�E�O���ʂ̎��ʂŐ��Ə�����
����̂����H
>>�r�̃p���[����уX�s�[�h�����܂�ɕs�����Ă��邽�߂�
���̉^���\�͂̂قƂ�ǂ�����̎����ɐU�蕪�������
���Ȃ��Ƃ����_�ł���B
�q�ǂ����܂����������瑫�̃p���[�������Ƃ����̂Ȃ�킩�邪
�l�H�̎Y���Ńp���[�s���ȂǂƂ������Ƃ͖������B������ł�����
�ł���B��������킯�ɂ͂����Ȃ����狭���ł��Ȃ���B
>>���ۊ߂̏o�͂����������傫�����肷��Γ�������n��
���̂܂ܓK�p���邾���ł��Ȃ�̃X�s�[�h�ő��s�\�ł���
�Ƃ����V�~�����[�V�������ʂ����\����Ă���B
����Ȕ��\�ɂ͐M�ߐ��͖������B���\�����葢�������B
���\���S����������Ȃ�A���āu�Q�����s�͕s�\�v�Ɣ��\����
�̂͂ǂ��Ȃ�H
�R�P�Q��MIT��3D-biped���A�r�̕t�������d�S�̋߂���
���邩��łȂ�������A�Ȃ�ł���Ȍ`�ɂ���K�v������H
���O�̂��X�T���̂����u�ے�̂��߂̔ے�v�Ȃ낤��B
������X�T���ɕ����������A����̌f���́A
http://www.namiashi.com/hihoukan/cgi-bin/bbs/basic_b.cgi
������No.657�̃��X�ɏ����Ă��邱�Ƃ����Ăǂ��v����H�@
��ڎl���̋؊������ҊߊO�]�E�O���ʂ̎��ʂŐ��Ə�����
����̂����H
314 �F���J�����������F05/01/18 10:30:48 ID:KDVGoGVq
>>313
���l�H�̎Y���Ńp���[�s���ȂǂƂ������Ƃ͖�����
�����̋@�B���u������p���[���グ��̂͏[���\�Ȃ낤���A
���ꂾ�Ƃ��炰�{�f�B�̓��ڌ��E�����Ⴄ��Ȃ��낤���H
�d���I�ɁB
�����\�����葢�������
���肽���Ă����݂̋Z�p�ł́u�傫���E�d���E�p���[�E���x�v����
�߂�Ȃ��̂ł́H�����炱���̃V�~�����[�V�������Ǝv����B
������̌f����
�ƂĂ��ʔ����I�P��̈Ӗ����قƂ�ǔ���Ȃ����ǁB
���l�H�̎Y���Ńp���[�s���ȂǂƂ������Ƃ͖�����
�����̋@�B���u������p���[���グ��̂͏[���\�Ȃ낤���A
���ꂾ�Ƃ��炰�{�f�B�̓��ڌ��E�����Ⴄ��Ȃ��낤���H
�d���I�ɁB
�����\�����葢�������
���肽���Ă����݂̋Z�p�ł́u�傫���E�d���E�p���[�E���x�v����
�߂�Ȃ��̂ł́H�����炱���̃V�~�����[�V�������Ǝv����B
������̌f����
�ƂĂ��ʔ����I�P��̈Ӗ����قƂ�ǔ���Ȃ����ǁB
315 �F���J�����������F05/01/18 13:45:01 ID:d1LZZzyc
�����>>311�̈ӌ��ɓ��ӂ��ȁB
�����A95=101���̓p���[�s���܂���������
����������悭���s�ɐ��������@�Ƃ��Ă̎��_��W�J���Ă�Ǝv�����B
>>313
���q�ǂ����܂����������瑫�̃p���[�������Ƃ����̂Ȃ�킩�邪
���l�H�̎Y���Ńp���[�s���ȂǂƂ������Ƃ͖������B������ł�����
���ł���B��������킯�ɂ͂����Ȃ����狭���ł��Ȃ���B
����͂�����ƒp�����������A�����������낢�뒲�ׂ邱�Ƃ����߂�B
�����A95=101���̓p���[�s���܂���������
����������悭���s�ɐ��������@�Ƃ��Ă̎��_��W�J���Ă�Ǝv�����B
>>313
���q�ǂ����܂����������瑫�̃p���[�������Ƃ����̂Ȃ�킩�邪
���l�H�̎Y���Ńp���[�s���ȂǂƂ������Ƃ͖������B������ł�����
���ł���B��������킯�ɂ͂����Ȃ����狭���ł��Ȃ���B
����͂�����ƒp�����������A�����������낢�뒲�ׂ邱�Ƃ����߂�B
316 �F���J�����������F05/01/18 16:45:29 ID:uAo4dCFb
�����Z�p�ł̓K�L�݂����ɓ��s��ᔻ���邾������
���{�b�g�͂ǂ�����č����\�ȓ��s�ɂ��邩���c�_����
���̈Ⴂ�͂�������
���{�b�g�͂ǂ�����č����\�ȓ��s�ɂ��邩���c�_����
���̈Ⴂ�͂�������
>>313
��������ł������ł���B
���w�����炢�ɂ��킩��悤�ɏ����Ɓu���s��p�@����Ȃ�����v
������Ȕ��\�ɂ͐M�ߐ��͖������B���\�����葢�������B
�����\���S����������Ȃ�A���āu�Q�����s�͕s�\�v�Ɣ��\����
���̂͂ǂ��Ȃ�H
���������ƌ����Ă�ȁB�I�E���^�����̔��\�̐^�U�܂ʼn��̐ӔC�ɂ��ꂻ���Ȑ����ł�
���Ȃ�ł���Ȍ`�ɂ���K�v������H
�@�\�I�ɗL���ŒP���ȃ��f���ɋ߂��ł��邩��B�ʂɕK�{����Ȃ��B
�ł�95�̍l�����ƕK�{�Ȃ�ˁH
��������ł������ł���B
���w�����炢�ɂ��킩��悤�ɏ����Ɓu���s��p�@����Ȃ�����v
������Ȕ��\�ɂ͐M�ߐ��͖������B���\�����葢�������B
�����\���S����������Ȃ�A���āu�Q�����s�͕s�\�v�Ɣ��\����
���̂͂ǂ��Ȃ�H
���������ƌ����Ă�ȁB�I�E���^�����̔��\�̐^�U�܂ʼn��̐ӔC�ɂ��ꂻ���Ȑ����ł�
���Ȃ�ł���Ȍ`�ɂ���K�v������H
�@�\�I�ɗL���ŒP���ȃ��f���ɋ߂��ł��邩��B�ʂɕK�{����Ȃ��B
�ł�95�̍l�����ƕK�{�Ȃ�ˁH
318 �F���J�����������F05/01/19 03:58:27 ID:9dFLwFsu
>>311�̘b�͋C�ɂȂ邯�ǁA���\�[�X���Ȃ��ƂȂ�Ƃ�������ȁB
>�r�̃p���[����уX�s�[�h�����܂�ɕs�����Ă��邽�߂�
>���̉^���\�͂̂قƂ�ǂ�����̎����ɐU�蕪�������
���ɂ��̘b����������o�Ă����̂����ɋC�ɂȂ�B
HONDA�̌����҂�����Ȃ��Ƙb���Ă����Ƃ͎v���A�����̗\�z�ł���H
�R���s���[�^�V�~�����[�V���������ĂɂȂ�Ȃ��Ƃ����_������>>313�ɓ��ӁB
�V�~�����[�V���������Ŏ������o����Ȃ�A���@�����K�v�Ȃ����ˁB
[12: �R���s���[�^�V�~�����[�V�����Ǝ����̈Ⴂ]
���Q�����s���A�R���s���[�^�̃V�~�����[�V�����ł͂����������Ă���Ƃ����l�����܂��ˁB
�������B�V�~�����[�V�����ł͂����Ɠ�����ł���B�Ƃ��낪�M�b�`�����`�����ł��ĂˁB
�Ƃ����̂́A�V�~�����[�V�������Ă����̂͏Փ˂��Ă����̂������ƈ����Ă��Ȃ���ł���B
[�ȉ���]
ttp://www.moriyama.com/netscience/Kajita_Shuji/Kajita-5.html#12
>�r�̃p���[����уX�s�[�h�����܂�ɕs�����Ă��邽�߂�
>���̉^���\�͂̂قƂ�ǂ�����̎����ɐU�蕪�������
���ɂ��̘b����������o�Ă����̂����ɋC�ɂȂ�B
HONDA�̌����҂�����Ȃ��Ƙb���Ă����Ƃ͎v���A�����̗\�z�ł���H
�R���s���[�^�V�~�����[�V���������ĂɂȂ�Ȃ��Ƃ����_������>>313�ɓ��ӁB
�V�~�����[�V���������Ŏ������o����Ȃ�A���@�����K�v�Ȃ����ˁB
[12: �R���s���[�^�V�~�����[�V�����Ǝ����̈Ⴂ]
���Q�����s���A�R���s���[�^�̃V�~�����[�V�����ł͂����������Ă���Ƃ����l�����܂��ˁB
�������B�V�~�����[�V�����ł͂����Ɠ�����ł���B�Ƃ��낪�M�b�`�����`�����ł��ĂˁB
�Ƃ����̂́A�V�~�����[�V�������Ă����̂͏Փ˂��Ă����̂������ƈ����Ă��Ȃ���ł���B
[�ȉ���]
ttp://www.moriyama.com/netscience/Kajita_Shuji/Kajita-5.html#12
319 �F95=101�F05/01/19 10:32:07 ID:hPWU6gN5
>>311�@���͏d�S�Ƒ��̈ʒu�W�̂������Ǝv������ł����ł͂Ȃ��āA�n�ʔ��͂�����
���i�͂��Ǝv������ł���l�ɁA�����ł͂Ȃ���A�Ƃ����̂��A�d�S�Ƒ��̈ʒu�W�Ő���
���悤�Ƃ��Ă����ł����ˁB�V�~�����[�V�������ʂȂǂ̔��\�̐M�ߐ��ɂ��ẮA�܂��A
�͂����茾���āu���ꂪ�ǂ������H�v���ăg�R�ł��ˁB����܂łɁA�f�[�^�̝s�����A
�����ł��Ȃ��f�[�^�̃f�b�`�グ�����������Ă��Ă܂�����ˁB�͂Ȃ͂������̂�
�Ȃ�ƁA�l.�O���[���̑̏d��10�s�����Ȃ����ăc�W�c�}���킹�������^������̋�����
�����肵�܂�����ˁB317�ɏ����Ă���u�@�\�I�ɗL���ŒP���ȃ��f���ɋ߂��ł���v
�Ƃ����̂́A���e�͒m��܂��A�����Ė\����f���܂��B�u����Ȃ���́w�y�P�x��ŁB�v
�l�̂͐_��I�ƌ�����قǕ��G�ł��B�l�Ԍ^�̃��{�b�g����낤�Ƃ��鎞�ɁA�P��������
���Ă͐悪�����ł���B�R���s�[�^�V�~�����[�V�������������ꂵ���u�G��(�����炲��)�v
�ł��邱�ƂɋC�Â������Ȃ��̂ɁA�P���Ȃ��̂��畡�G�Ȃ��̂Ɉڂ�Ƃ����̂́A�퓹�Ƃ͂����A
������������ł͂���͖����ł��ˁB
�߂̕��i�̃p���[�s���Ƃ����_�Ɋւ��ẮA���ɂ͂�����Ɖ���܂��A�u������ł�����
�Ȃ�v�ɋ߂��̂́A�ނ���i�}�g�̐l�Ԃ̕��ł��傤�ˁB�b�����狭���Ȃ�A���Ă̂�
�u�l�Ԃ��ăX�o���V���B�v�̃q�g�R�g�ł��ˁB�r�����Ŏ����グ��̂Ȃ�A���Ə������l�ł�
300�s�ȏ�������グ��Ƃ���܂ōs���Ă��͂��ł�
���i�͂��Ǝv������ł���l�ɁA�����ł͂Ȃ���A�Ƃ����̂��A�d�S�Ƒ��̈ʒu�W�Ő���
���悤�Ƃ��Ă����ł����ˁB�V�~�����[�V�������ʂȂǂ̔��\�̐M�ߐ��ɂ��ẮA�܂��A
�͂����茾���āu���ꂪ�ǂ������H�v���ăg�R�ł��ˁB����܂łɁA�f�[�^�̝s�����A
�����ł��Ȃ��f�[�^�̃f�b�`�グ�����������Ă��Ă܂�����ˁB�͂Ȃ͂������̂�
�Ȃ�ƁA�l.�O���[���̑̏d��10�s�����Ȃ����ăc�W�c�}���킹�������^������̋�����
�����肵�܂�����ˁB317�ɏ����Ă���u�@�\�I�ɗL���ŒP���ȃ��f���ɋ߂��ł���v
�Ƃ����̂́A���e�͒m��܂��A�����Ė\����f���܂��B�u����Ȃ���́w�y�P�x��ŁB�v
�l�̂͐_��I�ƌ�����قǕ��G�ł��B�l�Ԍ^�̃��{�b�g����낤�Ƃ��鎞�ɁA�P��������
���Ă͐悪�����ł���B�R���s�[�^�V�~�����[�V�������������ꂵ���u�G��(�����炲��)�v
�ł��邱�ƂɋC�Â������Ȃ��̂ɁA�P���Ȃ��̂��畡�G�Ȃ��̂Ɉڂ�Ƃ����̂́A�퓹�Ƃ͂����A
������������ł͂���͖����ł��ˁB
�߂̕��i�̃p���[�s���Ƃ����_�Ɋւ��ẮA���ɂ͂�����Ɖ���܂��A�u������ł�����
�Ȃ�v�ɋ߂��̂́A�ނ���i�}�g�̐l�Ԃ̕��ł��傤�ˁB�b�����狭���Ȃ�A���Ă̂�
�u�l�Ԃ��ăX�o���V���B�v�̃q�g�R�g�ł��ˁB�r�����Ŏ����グ��̂Ȃ�A���Ə������l�ł�
300�s�ȏ�������グ��Ƃ���܂ōs���Ă��͂��ł�
320 �F95=101�F05/01/19 10:36:44 ID:hPWU6gN5
>>313 ����̌f����No.657�Ƃ����ƁA����͎����O�ɏ������u�j���ł͑�ڎl�����g��Ȃ��v�ւ�
�^��ł��ˁH�@�u���w�Ö@�m�̌����_���v�u�֍��ʂ������ׂł̕G�L�W�̃f�[�^�ł����A��͂�
�ҊߊO�]�E�O���ʂ̎��ʂ���ԑ�ڎl���̋؊���������Ƃ̌��_�ł����v�֍��ʁH�@�֎q�ɍ�����
�`�ł��傤�ˁH�@�����Ȃ��ŋr�����������Ă�����Ă̂Ȃ痝�w�Ö@�m�̌����Ƃ��Ă������܂����A
�ҊߊO�]�E�O���ʂ��Č����ƁA����͑��鎞�Ɍ�납��O�ɋr�������Ă���̂Ƌt�̓����ł͂Ȃ�
�ł����ˁH�@�ˁH���Č������Ƃ����313����ɂ�����Ȃ��ł��傤����ǁA�����Ă��ċr����
���������Ƃ�����A�r��L�����Ȃ��邩�ǂ������ɂ��Ȃ�������Ȃ����P�ŁA�L�����܂܂�
������蓮�����̂Ȃ�A����͑�ڎl���͎��k���������ɂȂ�܂����A�Ȃ����܂܂Ȃ��ڎl����
�悭�L�т܂�����A�m���Ɂu�؊���������v�ƌ�����ł��傤�B
����͉����A�u���t�V�сv�̂悤�ȁA�������̒P�������ɂ����앶�ɉ߂��Ȃ���Ȃ��ł����H
����ς���ۂ̓���A�ڒn�r�����Ƃ��āA���������O�Ƀq�l���o���A�Ƃ����̂�����Ă݂邱�Ƃł��傤�B
���łɏ���̌f����No.656�ɁA�u�E�r���x���r�ɂȂ��Ă��Ȃ���A���łɂ��̎��_�ŁA���͍���
�V�r���ɐ芷����Ă䂭�������n�܂��Ă��܂��B���ꂪ���E���̐�ւ��ł��B�v�Ə����Ă���܂����A
����Ȃǂ̓j���̎n�܂�G���E�̋r�����݂Ɏ��ɂ��āA�Ƃ����̂��u���������̒��ł͕s�\�ł͂Ȃ����H�v
�Ƃ����^��ɑ��ċꂵ�}�M���Ɂu���ł��Ȃ��C���[�W�̐��E�v�Ƃ��Đ������悤�Ƃ��Ă����
�v���Ă��悤���Ȃ��ł��ˁB
�^��ł��ˁH�@�u���w�Ö@�m�̌����_���v�u�֍��ʂ������ׂł̕G�L�W�̃f�[�^�ł����A��͂�
�ҊߊO�]�E�O���ʂ̎��ʂ���ԑ�ڎl���̋؊���������Ƃ̌��_�ł����v�֍��ʁH�@�֎q�ɍ�����
�`�ł��傤�ˁH�@�����Ȃ��ŋr�����������Ă�����Ă̂Ȃ痝�w�Ö@�m�̌����Ƃ��Ă������܂����A
�ҊߊO�]�E�O���ʂ��Č����ƁA����͑��鎞�Ɍ�납��O�ɋr�������Ă���̂Ƌt�̓����ł͂Ȃ�
�ł����ˁH�@�ˁH���Č������Ƃ����313����ɂ�����Ȃ��ł��傤����ǁA�����Ă��ċr����
���������Ƃ�����A�r��L�����Ȃ��邩�ǂ������ɂ��Ȃ�������Ȃ����P�ŁA�L�����܂܂�
������蓮�����̂Ȃ�A����͑�ڎl���͎��k���������ɂȂ�܂����A�Ȃ����܂܂Ȃ��ڎl����
�悭�L�т܂�����A�m���Ɂu�؊���������v�ƌ�����ł��傤�B
����͉����A�u���t�V�сv�̂悤�ȁA�������̒P�������ɂ����앶�ɉ߂��Ȃ���Ȃ��ł����H
����ς���ۂ̓���A�ڒn�r�����Ƃ��āA���������O�Ƀq�l���o���A�Ƃ����̂�����Ă݂邱�Ƃł��傤�B
���łɏ���̌f����No.656�ɁA�u�E�r���x���r�ɂȂ��Ă��Ȃ���A���łɂ��̎��_�ŁA���͍���
�V�r���ɐ芷����Ă䂭�������n�܂��Ă��܂��B���ꂪ���E���̐�ւ��ł��B�v�Ə����Ă���܂����A
����Ȃǂ̓j���̎n�܂�G���E�̋r�����݂Ɏ��ɂ��āA�Ƃ����̂��u���������̒��ł͕s�\�ł͂Ȃ����H�v
�Ƃ����^��ɑ��ċꂵ�}�M���Ɂu���ł��Ȃ��C���[�W�̐��E�v�Ƃ��Đ������悤�Ƃ��Ă����
�v���Ă��悤���Ȃ��ł��ˁB
�\�[�X�͂Ƃ肠����>>69�ɂ���Y�����̃v���X�����[�X��PCWatch�̋L���ȁB
ttp://pc.watch.impress.co.jp/docs/2004/0416/hrp.htm
�^���ʂɊւ��鐧�䂪�s���Ă���Ƃ����L�q�����邵
�����p���[�̂��郂�[�^�[���ł���A�����Ƒ��s�炵�����s��������
�Ƃ���ˁB�ق������̃C���^�r���[�L��(�ǂ��Ō������͖Y�ꂽ)�ȂǁB
�����Ł�95�͑��s�^������̂��߂ɂǂ̂悤�Ȑ헪���Ƃ�ׂ����ƌ����b�����Ă������
�V�~�����[�V�����̌��ʂ��l������͓̂��R����
�ނ���u���@�ŏo����܂ł͍l���ɒl���Ȃ��v�Ȃ�đԓx���Ƃ�ق����ǂ������Ă�
�������@�ł��V�~�����[�V�����ɂȂ����͐����邾�낤����
�V�~�����[�V�����ł͖����Ȃ̂Ɏ��@�łȂ�o����Ȃ�Đ���͍H�w����Ȃ�����
����
>�l�Ԍ^�̃��{�b�g����낤�Ƃ��鎞�ɁA�P��������
>���Ă͐悪�����ł���B�R���s�[�^�V�~�����[�V�������������ꂵ���u�G��(�����炲��)�v
>�ł��邱�ƂɋC�Â������Ȃ��̂ɁA�P���Ȃ��̂��畡�G�Ȃ��̂Ɉڂ�Ƃ����̂́A�퓹�Ƃ͂����A
>������������ł͂���͖����ł��ˁB
95�����܂ǂ��̃V�~�����[�V�������ǂ��������̂Ǝv���Ă�̂��s���ɂȂ�ˁB
�܂����p�^���ʂ������悤�ȒP���_�̃��f�������������Ɩ�����c
�Ƃ����95�ɂ̓n�b�L�������Ă���������
(A)
��
�@ |
|�P�P�P|
|�@�@�@
(B)
�@ ��
�@ /�_
/ �_
/
A�͏d�S���ی^�̍���������ċr�ƂȂ����Ă���
B��MIT��3D-Biped�Ɠ������d�S�����ڋr�ƂȂ����Ă���
�r�͕t���������[�܂ł̒�������ъp�x��ύX�\�Ȏ��R�x������Ă���Ƃ���B
(�}�ł͗V�r�ł���E���̋r�͒������k�߂Ă���)
�������s���s����ŁA����AB��҂ɂ͖{���I�ȈႢ������̂������̂��H
����95���u���̗��҂͍��{�I�ɈقȂ�A�ł͑��s�͕s�\���ƍl���Ă���v���낤��
�������Ă���ǂǂ���
ttp://pc.watch.impress.co.jp/docs/2004/0416/hrp.htm
�^���ʂɊւ��鐧�䂪�s���Ă���Ƃ����L�q�����邵
�����p���[�̂��郂�[�^�[���ł���A�����Ƒ��s�炵�����s��������
�Ƃ���ˁB�ق������̃C���^�r���[�L��(�ǂ��Ō������͖Y�ꂽ)�ȂǁB
�����Ł�95�͑��s�^������̂��߂ɂǂ̂悤�Ȑ헪���Ƃ�ׂ����ƌ����b�����Ă������
�V�~�����[�V�����̌��ʂ��l������͓̂��R����
�ނ���u���@�ŏo����܂ł͍l���ɒl���Ȃ��v�Ȃ�đԓx���Ƃ�ق����ǂ������Ă�
�������@�ł��V�~�����[�V�����ɂȂ����͐����邾�낤����
�V�~�����[�V�����ł͖����Ȃ̂Ɏ��@�łȂ�o����Ȃ�Đ���͍H�w����Ȃ�����
����
>�l�Ԍ^�̃��{�b�g����낤�Ƃ��鎞�ɁA�P��������
>���Ă͐悪�����ł���B�R���s�[�^�V�~�����[�V�������������ꂵ���u�G��(�����炲��)�v
>�ł��邱�ƂɋC�Â������Ȃ��̂ɁA�P���Ȃ��̂��畡�G�Ȃ��̂Ɉڂ�Ƃ����̂́A�퓹�Ƃ͂����A
>������������ł͂���͖����ł��ˁB
95�����܂ǂ��̃V�~�����[�V�������ǂ��������̂Ǝv���Ă�̂��s���ɂȂ�ˁB
�܂����p�^���ʂ������悤�ȒP���_�̃��f�������������Ɩ�����c
�Ƃ����95�ɂ̓n�b�L�������Ă���������
(A)
��
�@ |
|�P�P�P|
|�@�@�@
(B)
�@ ��
�@ /�_
/ �_
/
A�͏d�S���ی^�̍���������ċr�ƂȂ����Ă���
B��MIT��3D-Biped�Ɠ������d�S�����ڋr�ƂȂ����Ă���
�r�͕t���������[�܂ł̒�������ъp�x��ύX�\�Ȏ��R�x������Ă���Ƃ���B
(�}�ł͗V�r�ł���E���̋r�͒������k�߂Ă���)
�������s���s����ŁA����AB��҂ɂ͖{���I�ȈႢ������̂������̂��H
����95���u���̗��҂͍��{�I�ɈقȂ�A�ł͑��s�͕s�\���ƍl���Ă���v���낤��
�������Ă���ǂǂ���
322 �F���J�����������F05/01/20 01:29:05 ID:AwnYiVHz
�����}������܂��肾
(A)
�@�@��
�@�@ |
|�P�P�P|
|�@�@�@
(B)
�@�@��
�@�@/�_
�@/�@�@�_
/
����Ȃ���
(A)
�@�@��
�@�@ |
|�P�P�P|
|�@�@�@
(B)
�@�@��
�@�@/�_
�@/�@�@�_
/
����Ȃ���
323 �F95=101�F05/01/20 03:53:45 ID:YfjRHhyZ
�ꌩ�{�i�I�Ȗ₢���������Ă���Ă���悤�ŁA����͂��ꂵ����ł����A311����͎���
�l���Ă��邱�Ƃ̓`�B�[�Ƃ��������Ă���ĂȂ���ŁA���I����c�Đ������`�������ƁB
�܂��A�Q�����Ă��ꂽ�}�̂ǂ�������A�����ŖړI�Ƃ���u�l�Ԍ^�����Q�������s���{�b�g�v
�Ƃ͈Ⴄ�̂��u�c�O�`�I�v�B
311����̂Q�̐}�́u����ȃV�~�����[�V�����ł͎��@�͓����Ȃ��v�Ƃ�����B�܂��A������
�����Ȃ��̂����ʐ}�ʼn��̂����ʐ}�A���x���ˁB
�u�l�Ԍ^�����Q�������s���{�b�g�v�Ƃ��ăV�~�����[�V�������邽�߂̍Œ�������������
�`���Ƃ��܂��B
http://jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/vwp?.dir=/%a5%ed%a5%dc%a5%c
3%a5%c8%c1%f6%a4%ec&.dnm=%bf%cd%c2%ce%b3%c6%c9%f4%a4%ce%bd%c5%bf%b4.jpg&.
src=bc&.view=l&.done=http%3a//jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/lst
%3f%26.dir=/%25a5%25ed%25a5%25dc%25a5%25c3%25a5%25c8%25c1%25f6%25a4%25ec%
26.src=bc%26.view=l
�l�Ԃ̏d�S�ʒu�Ƃ����͎̂p���A����Ŗڂ܂��邵���ω�����̂ŁA���̂�����Ɉ��
�ۂ�`���āu���ꂪ�d�S���v�Ȃǂƌ����킯�ɂ͂����Ȃ��B���ꂼ�ꂪ�d�������A
�������̕��̘̂A���̂ł���̂ŁA�ʒu���ω����Ȃ����i�ɕ����čl���Ȃ���Ȃ�Ȃ��B
�v����ɖ{���́u�S�̂̏d�S�v�Ƃ����̂́A�l�Ԍ^�̏ꍇ�ɂ͈ʒu����肷��Ƃ������Ƃ�
����Ƃ������ƁB
�u���肷��̂�����Ȃ��̂ȂǕ����Ă����B�v�ŕЕt�����Ȃ��Ɛ�ɐi�ނ��Ƃ͂ł��Ȃ��B
��ɐi�ނ��߂Ɂu���ɁA�w���������O�͂̂��Ƃ��x�����̗͂����郁�J�j�Y�������݂���v
�ƌ����Ă��B
�n�ʂ���̔��͂����Ői�ނƂ����ꍇ�ɂ�311����̌����悤�ɂQ�̐}�̖{���I�ȈႢ��
���炩�ɂ���̂��厖�Ȃ낤����ꉞ�����Ă�������ǁA��̂����{�ŊJ�����悤��
���Ă���l�Ԍ^���{�b�g�́u���ʂ��猩���s���S�Ȗ͎��}�v�ŁA���̂�MIT�̃N���Q�^���{�b�g��
���ʐ}���ˁBMIT�̃N���Q�^���{�b�g�̗��r�Ԃɂ��Ԋu�͂���̂ŁA��_���痼�r���o�Ă����
����}�͑��ʐ}���ˁB
�ǂ�����u�n�ʂ̏���X���[�Y�ɍ����ő���l�Ԍ^���{�b�g�v�Ƃ͂������ꂽ���̂���B
���ǂ��̃V�~�����[�V�������ǂ�قǍ������x���ɒB���Ă��悤���A�u���Ȃ��̒m��Ȃ����E�v�́A
�V�~�����[�V�����ɑg�ݍ��߂Ȃ���B����297�Łu�����v�ƌ����A318�̃T�C�g�̊��c����
�u�Փˁv�ƌ����Ă���u�s�m��ȑj�Q�v���v���V�~�����[�V�����ɑg�ݍ��ނ��Ƃ��܂��N���A�[���āA
���ꂪ���@�ł͂����ƕ��G�ɍ�p���Ă���Ƃ������Ƃ��������āA��]�c�͂��Ȃ��ėǂ���B
�l���Ă��邱�Ƃ̓`�B�[�Ƃ��������Ă���ĂȂ���ŁA���I����c�Đ������`�������ƁB
�܂��A�Q�����Ă��ꂽ�}�̂ǂ�������A�����ŖړI�Ƃ���u�l�Ԍ^�����Q�������s���{�b�g�v
�Ƃ͈Ⴄ�̂��u�c�O�`�I�v�B
311����̂Q�̐}�́u����ȃV�~�����[�V�����ł͎��@�͓����Ȃ��v�Ƃ�����B�܂��A������
�����Ȃ��̂����ʐ}�ʼn��̂����ʐ}�A���x���ˁB
�u�l�Ԍ^�����Q�������s���{�b�g�v�Ƃ��ăV�~�����[�V�������邽�߂̍Œ�������������
�`���Ƃ��܂��B
http://jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/vwp?.dir=/%a5%ed%a5%dc%a5%c
3%a5%c8%c1%f6%a4%ec&.dnm=%bf%cd%c2%ce%b3%c6%c9%f4%a4%ce%bd%c5%bf%b4.jpg&.
src=bc&.view=l&.done=http%3a//jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/lst
%3f%26.dir=/%25a5%25ed%25a5%25dc%25a5%25c3%25a5%25c8%25c1%25f6%25a4%25ec%
26.src=bc%26.view=l
�l�Ԃ̏d�S�ʒu�Ƃ����͎̂p���A����Ŗڂ܂��邵���ω�����̂ŁA���̂�����Ɉ��
�ۂ�`���āu���ꂪ�d�S���v�Ȃǂƌ����킯�ɂ͂����Ȃ��B���ꂼ�ꂪ�d�������A
�������̕��̘̂A���̂ł���̂ŁA�ʒu���ω����Ȃ����i�ɕ����čl���Ȃ���Ȃ�Ȃ��B
�v����ɖ{���́u�S�̂̏d�S�v�Ƃ����̂́A�l�Ԍ^�̏ꍇ�ɂ͈ʒu����肷��Ƃ������Ƃ�
����Ƃ������ƁB
�u���肷��̂�����Ȃ��̂ȂǕ����Ă����B�v�ŕЕt�����Ȃ��Ɛ�ɐi�ނ��Ƃ͂ł��Ȃ��B
��ɐi�ނ��߂Ɂu���ɁA�w���������O�͂̂��Ƃ��x�����̗͂����郁�J�j�Y�������݂���v
�ƌ����Ă��B
�n�ʂ���̔��͂����Ői�ނƂ����ꍇ�ɂ�311����̌����悤�ɂQ�̐}�̖{���I�ȈႢ��
���炩�ɂ���̂��厖�Ȃ낤����ꉞ�����Ă�������ǁA��̂����{�ŊJ�����悤��
���Ă���l�Ԍ^���{�b�g�́u���ʂ��猩���s���S�Ȗ͎��}�v�ŁA���̂�MIT�̃N���Q�^���{�b�g��
���ʐ}���ˁBMIT�̃N���Q�^���{�b�g�̗��r�Ԃɂ��Ԋu�͂���̂ŁA��_���痼�r���o�Ă����
����}�͑��ʐ}���ˁB
�ǂ�����u�n�ʂ̏���X���[�Y�ɍ����ő���l�Ԍ^���{�b�g�v�Ƃ͂������ꂽ���̂���B
���ǂ��̃V�~�����[�V�������ǂ�قǍ������x���ɒB���Ă��悤���A�u���Ȃ��̒m��Ȃ����E�v�́A
�V�~�����[�V�����ɑg�ݍ��߂Ȃ���B����297�Łu�����v�ƌ����A318�̃T�C�g�̊��c����
�u�Փˁv�ƌ����Ă���u�s�m��ȑj�Q�v���v���V�~�����[�V�����ɑg�ݍ��ނ��Ƃ��܂��N���A�[���āA
���ꂪ���@�ł͂����ƕ��G�ɍ�p���Ă���Ƃ������Ƃ��������āA��]�c�͂��Ȃ��ėǂ���B
324 �F���J�����������F05/01/20 09:57:53 ID:AwnYiVHz
���u�Ƃ����95�ɂ̓n�b�L�������Ă����������v
�̑O��ŕʂ̘b��Ȃ̂ł�������ɂ��Ȃ��œ����Ă���
�̑O��ŕʂ̘b��Ȃ̂ł�������ɂ��Ȃ��œ����Ă���
325 �F���J�����������F05/01/20 11:14:48 ID:9oaDSilG
95�̌����n�ʔ��͈ȊO�̐��i���������邽�߂ɂ�
�Ђ˂肪�\�ȍ��i�\���i�������̍���2�{�Ƃ����������������́j���K�{���Ă��ƁH
���Ƃ����烂�[�^�ɂ��쓮�����Ă���葖�s�͍�����
�S����̃A�N�`���G�[�^�łЂ˂�ɑΉ��ł��Ȃ�����
�P�����������f���ɂ�鑖�s����͓�����Ȃ���B
���S�̂̏d�S
���{�b�g�̏ꍇ����͓��肷��ʒu�ł͂Ȃ�
�ڕW�Ƃ���ʒu�Ȃ̂ŁA�ڕW�l�ɑ���e�߂̐U�镑����
�v�Z�ł͂����o�����Ƃ͎��ɓ��R�A�����Čv�Z�ł͂����o���ȏ�
�ω��ʂ�����ł���B�܂胍�{�b�g�̐U�镑���Ɋւ������
�V�~�����[�V�����̌��ʂ͐��䂪���������ǂ����̔��f�ޗ��Ƃ��ėL��
������V�~�����[�V�����͓��ĂɂȂ�Ƃ��Ȃ�Ȃ��Ƃ��̖��ł͂Ȃ��K�v�Ȃ�B
���{�b�g�̉^���ƂƐl�̂̉^�����V�~�����[�V�����̂Ƃ͍��{�I�ɈقȂ��
���{�b�g�͌��ɂȂ�f�[�^�����[�^�̃g���N���獜�i�̒����Ȃ����Ă���p�x�܂�
���ׂĐv���ꂽ�Œ�l������A���邽�߂̐��l�͂قΓ���ł���B
�l�̂̋ؗ͂⍜�i�̉^���ʂ̃f�[�^�͖����̃p�^�[�������邵
�̒��ɂ���Ă����E�����قǕs�m�肾������邽�߂̐��l�������ł������ω�����B
�V�~�����[�V�������ʂ����ĂɂȂ�Ȃ��͓̂��R���Ǝv��������Ȃɏd�v�ł͂Ȃ��̂�������Ȃ�
���̕ӂ̈Ⴂ�͂���̂ŁA�V�~�����[�V����������Ȃɔn���ɂ��Ȃ��ł���
���u���肷��̂�����Ȃ��̂ȂǕ����Ă����B�v
���ꂪ�v�Z�ł���Ă��Ǔ���ł���̂����{�b�g�Ȃ̂ł́H
�Ђ˂肪�\�ȍ��i�\���i�������̍���2�{�Ƃ����������������́j���K�{���Ă��ƁH
���Ƃ����烂�[�^�ɂ��쓮�����Ă���葖�s�͍�����
�S����̃A�N�`���G�[�^�łЂ˂�ɑΉ��ł��Ȃ�����
�P�����������f���ɂ�鑖�s����͓�����Ȃ���B
���S�̂̏d�S
���{�b�g�̏ꍇ����͓��肷��ʒu�ł͂Ȃ�
�ڕW�Ƃ���ʒu�Ȃ̂ŁA�ڕW�l�ɑ���e�߂̐U�镑����
�v�Z�ł͂����o�����Ƃ͎��ɓ��R�A�����Čv�Z�ł͂����o���ȏ�
�ω��ʂ�����ł���B�܂胍�{�b�g�̐U�镑���Ɋւ������
�V�~�����[�V�����̌��ʂ͐��䂪���������ǂ����̔��f�ޗ��Ƃ��ėL��
������V�~�����[�V�����͓��ĂɂȂ�Ƃ��Ȃ�Ȃ��Ƃ��̖��ł͂Ȃ��K�v�Ȃ�B
���{�b�g�̉^���ƂƐl�̂̉^�����V�~�����[�V�����̂Ƃ͍��{�I�ɈقȂ��
���{�b�g�͌��ɂȂ�f�[�^�����[�^�̃g���N���獜�i�̒����Ȃ����Ă���p�x�܂�
���ׂĐv���ꂽ�Œ�l������A���邽�߂̐��l�͂قΓ���ł���B
�l�̂̋ؗ͂⍜�i�̉^���ʂ̃f�[�^�͖����̃p�^�[�������邵
�̒��ɂ���Ă����E�����قǕs�m�肾������邽�߂̐��l�������ł������ω�����B
�V�~�����[�V�������ʂ����ĂɂȂ�Ȃ��͓̂��R���Ǝv��������Ȃɏd�v�ł͂Ȃ��̂�������Ȃ�
���̕ӂ̈Ⴂ�͂���̂ŁA�V�~�����[�V����������Ȃɔn���ɂ��Ȃ��ł���
���u���肷��̂�����Ȃ��̂ȂǕ����Ă����B�v
���ꂪ�v�Z�ł���Ă��Ǔ���ł���̂����{�b�g�Ȃ̂ł́H
326 �F95=101�F05/01/20 14:19:54 ID:gWv8aUQq
��������ɂ��Ă���H�@�V�~�����[�V�����Ƃ������t���g�������炩�ȁH�@������ɂ��Ă�
�`�a�ǂ���������ł̑��s�͂ł��Ȃ����A���ɑ��ꂽ�Ƃ��Ă��A����ȏd�S���w�_�x�ɏW��
�����悤�Ȃ��̂ɂ͉�����p���͖�������ˁB������u�������s���s����Łv����AB��҂�
�{���I�ȈႢ������Ƃ������Ƃ����������āA�ǂ�����������s�͂ł��Ȃ�����A
�����悤�͂Ȃ���B�a�͂���܂łɐ��������悤�ɁA�s�����s��������Ȃ�o���邯�ǂˁB
>>325 �u�Ђ˂�v���̂Ȃ�A����ASIMO�Ȃł��Ђ˂��͈͂͏������Ă��ł��Ă���
�͂��ł����B���̏�ł������m�^�m�^�u�E�����E�v�����Ă܂������ˁB
�u�n�ʔ��͈ȊO�̐��i���������邽�߂Ɂv�Ђ˂肪�\�ȍ��i�\���͕K�{�ł͂Ȃ��ł��B
�j������ł͑O�Ɂu�Ђ˂�o���v�Ƃ����̂ł����A�ʂɂЂ˂�K�v�͂���܂���B
���{�b�g�̉^���Ɛl�̂̉^�������{�I�ɈقȂ�ƍl���Ă�����i�v�Ɂu�X���[�Y��
���郍�{�b�g�v�͏o���Ȃ��ł���B����ASIMO�́w�����Ă���x�X�s�[�h����������
�オ��ƁA�����ɂ���ĕG���牺���u�U��o����āv���܂��B�X�l��U��o������
���Ȃ��Ă������ɂ��͂ŐU��o����Ă��܂���ł���B�U��o����Ȃ��悤��
���悤�Ƃ�����A�X�l�̓��������ŁA�O�ɏo���r�S�̂̃R���g���[�����������Ƃ�
�Ȃ�܂��B���̐U��o����鐨���͍��ꍏ�ƕω����܂�����A�͂����Ăǂ��܂�
���m�ɗ\�z�ł��邩�H
���ɃX�l���U��o����邱�Ƃ����ׂČv�Z�ł��āu���߂�ʒu�v�ɑ��𒅂��邱�Ƃ�
�o�����Ƃ��Ă��A���̈ʒu�ɑ����������ƂŎ��̈���̂��߂̐��i�͂铮�삪�\�ŁA
���R�P�Ȃ��悤�ɑ̏d���x���A�܂��s�v�ȃu���[�L�ɂȂ�Ȃ��悤�ɂł���̂��H���R�A
�����Ă���ꍇ�A�ڒn���Ԃ͌����Ă܂��B�ɂ߂ĒZ����u�̐ڒn�ŁA������S��
���Ȃ��Ƃ�����̂ł���B�@
�i�}�g�̐l�Ԃ̑���t�H�[���ł��A������`���ׂĂ��I�莩�g���ӎ����Ă���Ă���
����̌��ʂ��Ǝv������ł���X�J�^�������҂����܂����A�u�����āv�X�s�[�h��
�オ�������A�ӎ����Ă���Ă���̂Ƃ͈Ⴄ�`�ɂȂ��Ă��܂���ł��B
>>���{�b�g�͌��ɂȂ�f�[�^�����[�^�̃g���N���獜�i�̒����Ȃ����Ă���p�x�܂�
���ׂĐv���ꂽ�Œ�l������A���邽�߂̐��l�͂قΓ���ł���
�@�@��
���ꂪ�ʗp����̂̓W���M���O���x�̑����܂łł��傤�B�ꉞ�uJog�v�ƁuRun�v�́A
���h���͋�ʂ��Ă܂��B
�`�a�ǂ���������ł̑��s�͂ł��Ȃ����A���ɑ��ꂽ�Ƃ��Ă��A����ȏd�S���w�_�x�ɏW��
�����悤�Ȃ��̂ɂ͉�����p���͖�������ˁB������u�������s���s����Łv����AB��҂�
�{���I�ȈႢ������Ƃ������Ƃ����������āA�ǂ�����������s�͂ł��Ȃ�����A
�����悤�͂Ȃ���B�a�͂���܂łɐ��������悤�ɁA�s�����s��������Ȃ�o���邯�ǂˁB
>>325 �u�Ђ˂�v���̂Ȃ�A����ASIMO�Ȃł��Ђ˂��͈͂͏������Ă��ł��Ă���
�͂��ł����B���̏�ł������m�^�m�^�u�E�����E�v�����Ă܂������ˁB
�u�n�ʔ��͈ȊO�̐��i���������邽�߂Ɂv�Ђ˂肪�\�ȍ��i�\���͕K�{�ł͂Ȃ��ł��B
�j������ł͑O�Ɂu�Ђ˂�o���v�Ƃ����̂ł����A�ʂɂЂ˂�K�v�͂���܂���B
���{�b�g�̉^���Ɛl�̂̉^�������{�I�ɈقȂ�ƍl���Ă�����i�v�Ɂu�X���[�Y��
���郍�{�b�g�v�͏o���Ȃ��ł���B����ASIMO�́w�����Ă���x�X�s�[�h����������
�オ��ƁA�����ɂ���ĕG���牺���u�U��o����āv���܂��B�X�l��U��o������
���Ȃ��Ă������ɂ��͂ŐU��o����Ă��܂���ł���B�U��o����Ȃ��悤��
���悤�Ƃ�����A�X�l�̓��������ŁA�O�ɏo���r�S�̂̃R���g���[�����������Ƃ�
�Ȃ�܂��B���̐U��o����鐨���͍��ꍏ�ƕω����܂�����A�͂����Ăǂ��܂�
���m�ɗ\�z�ł��邩�H
���ɃX�l���U��o����邱�Ƃ����ׂČv�Z�ł��āu���߂�ʒu�v�ɑ��𒅂��邱�Ƃ�
�o�����Ƃ��Ă��A���̈ʒu�ɑ����������ƂŎ��̈���̂��߂̐��i�͂铮�삪�\�ŁA
���R�P�Ȃ��悤�ɑ̏d���x���A�܂��s�v�ȃu���[�L�ɂȂ�Ȃ��悤�ɂł���̂��H���R�A
�����Ă���ꍇ�A�ڒn���Ԃ͌����Ă܂��B�ɂ߂ĒZ����u�̐ڒn�ŁA������S��
���Ȃ��Ƃ�����̂ł���B�@
�i�}�g�̐l�Ԃ̑���t�H�[���ł��A������`���ׂĂ��I�莩�g���ӎ����Ă���Ă���
����̌��ʂ��Ǝv������ł���X�J�^�������҂����܂����A�u�����āv�X�s�[�h��
�オ�������A�ӎ����Ă���Ă���̂Ƃ͈Ⴄ�`�ɂȂ��Ă��܂���ł��B
>>���{�b�g�͌��ɂȂ�f�[�^�����[�^�̃g���N���獜�i�̒����Ȃ����Ă���p�x�܂�
���ׂĐv���ꂽ�Œ�l������A���邽�߂̐��l�͂قΓ���ł���
�@�@��
���ꂪ�ʗp����̂̓W���M���O���x�̑����܂łł��傤�B�ꉞ�uJog�v�ƁuRun�v�́A
���h���͋�ʂ��Ă܂��B
�ł͂܂��u���͂ɂ���āv���s���s���P�[�X�ɂ��Ă��������Ă��炢����
�}(A)(B)�͂���������ʂ���̐}���Ƃ��邼
>>108�ɂ�����
>���i�͂͂����Ɍ����Ă��܂��ƁAMIT�́u�l�����N���Q�v�̂��̌`�́A
>�K�v�s�����ƌ����܂��B
�Əq�ׂĂ���Ƃ��납��A�}(B�j�͂��̕s�������A
(A)�͖������Ă��Ȃ��ƍl���Ă���̂ł͂Ȃ����H
�����łȂ��Ƃ���u���̌`�v���Ă͉̂����Ӗ����Ă���̂��H
�}(A)(B)�͂���������ʂ���̐}���Ƃ��邼
>>108�ɂ�����
>���i�͂͂����Ɍ����Ă��܂��ƁAMIT�́u�l�����N���Q�v�̂��̌`�́A
>�K�v�s�����ƌ����܂��B
�Əq�ׂĂ���Ƃ��납��A�}(B�j�͂��̕s�������A
(A)�͖������Ă��Ȃ��ƍl���Ă���̂ł͂Ȃ����H
�����łȂ��Ƃ���u���̌`�v���Ă͉̂����Ӗ����Ă���̂��H
���ɃV�~�����[�V�����̐���
>>323��
>�l�Ԃ̏d�S�ʒu�Ƃ����͎̂p���A����Ŗڂ܂��邵���ω�����̂ŁA���̂�����Ɉ��
>�ۂ�`���āu���ꂪ�d�S���v�Ȃǂƌ����킯�ɂ͂����Ȃ��B
�Ƃ�����������Ă�Ƃ��납�炵��95�͌��݂̓��͊w�V�~�����[�V�����̃��f���̎���
�s���ɒႭ���ς����Ă��邱�Ƃ��m�M�����ɂ͂���Ȃ��B
ASIMO��QRIO���x���̍��x�ȉ^���\�͂���������{�b�g�̃V�~�����[�^��
�l�W��{�Ɏ���܂ł��̎��ʂ�[�����g�̕��z�����f�����������̂��g�p����Ă���B
�̂�
>�l�Ԍ^�̏ꍇ�ɂ͈ʒu����肷��Ƃ������Ƃ�����Ƃ������ƁB
>�u���肷��̂�����Ȃ��̂ȂǕ����Ă����B�v�ŕЕt�����Ȃ��Ɛ�ɐi�ނ��Ƃ͂ł��Ȃ��B
�Ȃ�Ă̂͂���܂�_�߂�ꂽ�ԓx�ł͂Ȃ��ȁB
�����܂��l�̂͂��ɂ傮�ɂ債�Ă邩�炠����x�̋ߎ��͕K�v���낤��
���{�b�g�̏ꍇ�͑����������x�ł��ꂪ���f�����ł���B
�t�Ɍ����ƁA����`�ȏՓˎ��ۂ₮�ɂႮ�ɂႵ�����i�Ȃ�
���݂̂Ƃ��댵���Ɏ�舵���̂��������A���{�b�g�͂��������������ɗ͔r������
�������̃t���[�����K�`�K�`�̃n�C�Q�C���T�[�{�œ��������Ƃ�
�V�~�����[�V�����̐��x���҂��ł���Ƃ�������B
>>318�̃����N��Ȃ����������b�����Ă���͂��Ȃ̂����ق�Ƃɓǂ̂��H
�܂��Փ˂Ɋւ��Ă��A�����ɓ����̖��炩�Ȓe���v�f��z�u���āA
���������Œn�ʂƂ́u�Փˁv���s�����Ƃŕs�m�肳���ŏ����ɂƂǂ߂��@���p�����Ă���͂����B
>�V�~�����[�V�����ɑg�ݍ��ނ��Ƃ��܂��N���A�[���āA
�Ă����̂͌��肳��Ȃ�����o���Ă�́B
�͂����茾���ă��{�b�g�ɂ�����V�~�����[�V�����̉��l���Â��������B
>>323��
>�l�Ԃ̏d�S�ʒu�Ƃ����͎̂p���A����Ŗڂ܂��邵���ω�����̂ŁA���̂�����Ɉ��
>�ۂ�`���āu���ꂪ�d�S���v�Ȃǂƌ����킯�ɂ͂����Ȃ��B
�Ƃ�����������Ă�Ƃ��납�炵��95�͌��݂̓��͊w�V�~�����[�V�����̃��f���̎���
�s���ɒႭ���ς����Ă��邱�Ƃ��m�M�����ɂ͂���Ȃ��B
ASIMO��QRIO���x���̍��x�ȉ^���\�͂���������{�b�g�̃V�~�����[�^��
�l�W��{�Ɏ���܂ł��̎��ʂ�[�����g�̕��z�����f�����������̂��g�p����Ă���B
�̂�
>�l�Ԍ^�̏ꍇ�ɂ͈ʒu����肷��Ƃ������Ƃ�����Ƃ������ƁB
>�u���肷��̂�����Ȃ��̂ȂǕ����Ă����B�v�ŕЕt�����Ȃ��Ɛ�ɐi�ނ��Ƃ͂ł��Ȃ��B
�Ȃ�Ă̂͂���܂�_�߂�ꂽ�ԓx�ł͂Ȃ��ȁB
�����܂��l�̂͂��ɂ傮�ɂ債�Ă邩�炠����x�̋ߎ��͕K�v���낤��
���{�b�g�̏ꍇ�͑����������x�ł��ꂪ���f�����ł���B
�t�Ɍ����ƁA����`�ȏՓˎ��ۂ₮�ɂႮ�ɂႵ�����i�Ȃ�
���݂̂Ƃ��댵���Ɏ�舵���̂��������A���{�b�g�͂��������������ɗ͔r������
�������̃t���[�����K�`�K�`�̃n�C�Q�C���T�[�{�œ��������Ƃ�
�V�~�����[�V�����̐��x���҂��ł���Ƃ�������B
>>318�̃����N��Ȃ����������b�����Ă���͂��Ȃ̂����ق�Ƃɓǂ̂��H
�܂��Փ˂Ɋւ��Ă��A�����ɓ����̖��炩�Ȓe���v�f��z�u���āA
���������Œn�ʂƂ́u�Փˁv���s�����Ƃŕs�m�肳���ŏ����ɂƂǂ߂��@���p�����Ă���͂����B
>�V�~�����[�V�����ɑg�ݍ��ނ��Ƃ��܂��N���A�[���āA
�Ă����̂͌��肳��Ȃ�����o���Ă�́B
�͂����茾���ă��{�b�g�ɂ�����V�~�����[�V�����̉��l���Â��������B
329 �F95=101�F05/01/21 04:13:16 ID:oGAdulNb
>>311 ������A�ǂ�قǍ��x�ɃV�~�����[�V���������B���Ă��Ă��u���Ȃ��̒m��Ȃ����E�v��
����ƌ����Ă��B�L�~�A�������łɓ����������Ō����Ă邶��Ȃ����H
>>����`�ȏՓˎ��ۂ₮�ɂႮ�ɂႵ�����i�Ȃ͌��݂̂Ƃ��댵���Ɏ�舵���̂��������A
���{�b�g�͂��������������ɗ͔r�����č������̃t���[�����K�`�K�`�̃n�C�Q�C���T�[�{��
���������ƂŃV�~�����[�V�����̐��x���҂��ł���Ƃ�������B
�u���݂̂Ƃ��댵���Ɏ�舵���̂��������v������Ă������Ɏ�舵��Ȃ��ƃ_���Ȃ�B
�u���������������ɗ͔r�����č������̃t���[�����K�`�K�`�̃n�C�Q�C���T�[�{�Łv������Ȃ��Ƃ�
����Ă���A�l�̂Ƃ͂܂�ł������ꂽ�������������Ȃ�����H�@�ړI���u�l�ԂƓ����悤�ɕ����A
���郍�{�b�g����邱�Ɓv�Ȃ�A�܂��l�Ԃ��Ȃ����̂悤�ɕ����A�����̂��H���A��͂��āA
�����ɂ��Đl�Ԃ̓���ɋ߂Â��邩�H�@�Ƃ������ɍs���̂�������O�Ȃ�Ȃ����H
���̂��߂ɂ͐l�̂ɋ߂Â��邱�Ƃ��l����ׂ��ŁA�l�̂Ɨ���Ă����āu������͔̂r���v����
�u�V�~�����[�V�����̐��x���҂��Ă���v�Ƃ������̂́A���Ȗ����A�}�X�^�[�x�[�V�����ɉ߂��Ȃ��B
�u�Â�������v�ǂ��낶��Ȃ��āu�A�z�v�ƌy�̂���邾������B
�L�~�����{�b�g�̌��������Ă��铖���҂Ȃ̂��P�Ȃ�쎟�n�Ȃ̂��͒m��Ȃ����AB�̐}��
�u���ʐ}�v�ƌ���������́A��������̓V���E�g�Ƃ��������Ȃ��B�@�u���������v�Ƃ������Ƃ�
�l���悤�Ƃ��鎞�ɁA���ʐ}�Ȃ`���Ăǂ�����H�@������ƃL�~�̃��x����
�m���߂����Ă���B�u����`�ȏՓˎ��ہv�̗�������Ă���Ȃ����H
����ƌ����Ă��B�L�~�A�������łɓ����������Ō����Ă邶��Ȃ����H
>>����`�ȏՓˎ��ۂ₮�ɂႮ�ɂႵ�����i�Ȃ͌��݂̂Ƃ��댵���Ɏ�舵���̂��������A
���{�b�g�͂��������������ɗ͔r�����č������̃t���[�����K�`�K�`�̃n�C�Q�C���T�[�{��
���������ƂŃV�~�����[�V�����̐��x���҂��ł���Ƃ�������B
�u���݂̂Ƃ��댵���Ɏ�舵���̂��������v������Ă������Ɏ�舵��Ȃ��ƃ_���Ȃ�B
�u���������������ɗ͔r�����č������̃t���[�����K�`�K�`�̃n�C�Q�C���T�[�{�Łv������Ȃ��Ƃ�
����Ă���A�l�̂Ƃ͂܂�ł������ꂽ�������������Ȃ�����H�@�ړI���u�l�ԂƓ����悤�ɕ����A
���郍�{�b�g����邱�Ɓv�Ȃ�A�܂��l�Ԃ��Ȃ����̂悤�ɕ����A�����̂��H���A��͂��āA
�����ɂ��Đl�Ԃ̓���ɋ߂Â��邩�H�@�Ƃ������ɍs���̂�������O�Ȃ�Ȃ����H
���̂��߂ɂ͐l�̂ɋ߂Â��邱�Ƃ��l����ׂ��ŁA�l�̂Ɨ���Ă����āu������͔̂r���v����
�u�V�~�����[�V�����̐��x���҂��Ă���v�Ƃ������̂́A���Ȗ����A�}�X�^�[�x�[�V�����ɉ߂��Ȃ��B
�u�Â�������v�ǂ��낶��Ȃ��āu�A�z�v�ƌy�̂���邾������B
�L�~�����{�b�g�̌��������Ă��铖���҂Ȃ̂��P�Ȃ�쎟�n�Ȃ̂��͒m��Ȃ����AB�̐}��
�u���ʐ}�v�ƌ���������́A��������̓V���E�g�Ƃ��������Ȃ��B�@�u���������v�Ƃ������Ƃ�
�l���悤�Ƃ��鎞�ɁA���ʐ}�Ȃ`���Ăǂ�����H�@������ƃL�~�̃��x����
�m���߂����Ă���B�u����`�ȏՓˎ��ہv�̗�������Ă���Ȃ����H
330 �F���J�����������F05/01/21 06:43:42 ID:eSf46HzM
>>311
���A�E�ϗ͂���ˁB
���܂ŗ����Ă������̈ӌ��̐��������u�q�ϓI�Ɂv�������Ƃ��Ȃ��y�Ƌc�_
���悤�Ƃ��Ă����ʂ���B�D���Ȃ悤�ɏ������Ƃ��Ⴂ����Ȃ��H
���A�E�ϗ͂���ˁB
���܂ŗ����Ă������̈ӌ��̐��������u�q�ϓI�Ɂv�������Ƃ��Ȃ��y�Ƌc�_
���悤�Ƃ��Ă����ʂ���B�D���Ȃ悤�ɏ������Ƃ��Ⴂ����Ȃ��H
331 �F���J�����������F05/01/21 09:51:20 ID:GGBLYWz/
���̓_�����͂ǂ����Ă��͂����肳���Ă��������̂�
�}�𑝂₷���B����łǂ���
(A)����
�@�@��
�@�@ |
|�P�P�P|
|�@�@�@
(A)����
�@��
�@ |
�@/�_
/�@�@�@
(B)����
�@�@��
�@�@/�_
�@/�@�@�_
/
(B)����
�@�@��
�@ /�_
�@/�@�@�_
/�@�@�@
����Ȃ���
�}�𑝂₷���B����łǂ���
(A)����
�@�@��
�@�@ |
|�P�P�P|
|�@�@�@
(A)����
�@��
�@ |
�@/�_
/�@�@�@
(B)����
�@�@��
�@�@/�_
�@/�@�@�_
/
(B)����
�@�@��
�@ /�_
�@/�@�@�_
/�@�@�@
����Ȃ���
332 �F���J�����������F05/01/21 09:56:02 ID:GGBLYWz/
���Ȃ݂ɐi�s�����͐��ʐ}�̎�O�A
���ʐ}�Ō����Ƃ���̉E��
���ʐ}�Ō����Ƃ���̉E��
333 �F���J�����������F05/01/21 10:14:12 ID:GGBLYWz/
�NjL�B�����ʋr�Ƃ͌����ĂȂ������
334 �F95=101�F05/01/21 11:18:33 ID:oGAdulNb
�H�a�͐��ʐ}�Ƒ��ʐ}�������Ȃ̂��H�@����͕`���ԈႢ�Ƃ��āA�a��MIT�̃N���Q���Ƃ���
���ʐ}�ł͗����͂قڕ��s�Ƃ������Ƃɂ��邯�ǁA�����낤�ˁH�@
�܂��A�r�̃A�N�V�������S�R�`���ĂȂ�����ǁA�a�͕G�����̐L�яk�^�ł`��ASIMO�Ȃǂ�
�����X�C���O�^�Ƃ��čl�����B
��}���ăA�b�v���邩��҂��ĂĂ���B
����Ɓu����`�ȏՓˎ��ہv�̗�������Č��Ă����ȁB
���ʐ}�ł͗����͂قڕ��s�Ƃ������Ƃɂ��邯�ǁA�����낤�ˁH�@
�܂��A�r�̃A�N�V�������S�R�`���ĂȂ�����ǁA�a�͕G�����̐L�яk�^�ł`��ASIMO�Ȃǂ�
�����X�C���O�^�Ƃ��čl�����B
��}���ăA�b�v���邩��҂��ĂĂ���B
����Ɓu����`�ȏՓˎ��ہv�̗�������Č��Ă����ȁB
335 �F���J�����������F05/01/21 15:07:30 ID:LADzl/mW
>�H�a�͐��ʐ}�Ƒ��ʐ}�������Ȃ̂��H�@����͕`���ԈႢ�Ƃ���
�����ԈႢ����Ȃ��Ǝv����
�������E�ɊJ���Ȃ���O��ɂ��J���Ă�}����Ȃ��H
>>331���͂����肳�������̂�
�Ҋ߂̌`����ǂ��Ƃ炦�Ă邩�m�肽�����Ď����Ǝv������
�����ԈႢ����Ȃ��Ǝv����
�������E�ɊJ���Ȃ���O��ɂ��J���Ă�}����Ȃ��H
>>331���͂����肳�������̂�
�Ҋ߂̌`����ǂ��Ƃ炦�Ă邩�m�肽�����Ď����Ǝv������
336 �F95=101�F05/01/21 15:21:17 ID:oGAdulNb
�H�H�H��H�@�������Ƃ������}�͂�蒼�����ȁB������ƃI�`�B331�����Ȃ̂��H
337 �F���J�����������F05/01/21 22:41:19 ID:GGBLYWz/
>>321�Q��
>A�͏d�S���ی^�̍���������ċr�ƂȂ����Ă���
>B��MIT��3D-Biped�Ɠ������d�S�����ڋr�ƂȂ����Ă���
>�r�͕t���������[�܂ł̒�������ъp�x��ύX�\�Ȏ��R�x������Ă���Ƃ���B
>(�}�ł͗V�r�ł���E���̋r�͒������k�߂Ă���)
>A�͏d�S���ی^�̍���������ċr�ƂȂ����Ă���
>B��MIT��3D-Biped�Ɠ������d�S�����ڋr�ƂȂ����Ă���
>�r�͕t���������[�܂ł̒�������ъp�x��ύX�\�Ȏ��R�x������Ă���Ƃ���B
>(�}�ł͗V�r�ł���E���̋r�͒������k�߂Ă���)
���Ȃ݂ɐ}�͕`���ԈႢ�ł͂Ȃ�>>335�̂����Ƃ��肾
>�L�~�����{�b�g�̌��������Ă��铖���҂Ȃ̂��P�Ȃ�쎟�n�Ȃ̂��͒m��Ȃ���
���w�����炢�炵����>>313�ɂ��ƁB
>������ƃL�~�̃��x�����m���߂����Ă���B�u����`�ȏՓˎ��ہv�̗�������Ă���Ȃ����H
��ʂɏՓˎ��ۂ��̂��̂�����`���ہB
�̂Ɂu����`�ȏՓˎ��ہv�Ƃ����̂́u�Փˎ��ۑS�ʁi������Ĕ���`����ˁj�v
�Ƃ��������Ă��悢
�S�������ĉ��ɏՓ˂��邱�Ƃ��̂��̂�ʂƂ��Đ��`����`�����Ȃ�
����`�ȔS�e�����������������̂��Փ˂��邱�Ƃ�
���̌�̋����̗\�����e�ՂłȂ��P�[�X�����`���ۂƂ��邱�ƂɂȂ�
�Փ˂��邱�Ƃŕό`���A����ɂ���ĔS�e������������`�ɕω�����
�ꍇ�Ȃǂ�����ɓ�����B
��̗�Ƃ��Ă͂܂����ɂႮ�ɂႵ�����̂Ȃ牽�ł���������
���ɂ���̓������܂ƕǂ̏Փ˂Ƃ�����Ȃ�
>�L�~�����{�b�g�̌��������Ă��铖���҂Ȃ̂��P�Ȃ�쎟�n�Ȃ̂��͒m��Ȃ���
���w�����炢�炵����>>313�ɂ��ƁB
>������ƃL�~�̃��x�����m���߂����Ă���B�u����`�ȏՓˎ��ہv�̗�������Ă���Ȃ����H
��ʂɏՓˎ��ۂ��̂��̂�����`���ہB
�̂Ɂu����`�ȏՓˎ��ہv�Ƃ����̂́u�Փˎ��ۑS�ʁi������Ĕ���`����ˁj�v
�Ƃ��������Ă��悢
�S�������ĉ��ɏՓ˂��邱�Ƃ��̂��̂�ʂƂ��Đ��`����`�����Ȃ�
����`�ȔS�e�����������������̂��Փ˂��邱�Ƃ�
���̌�̋����̗\�����e�ՂłȂ��P�[�X�����`���ۂƂ��邱�ƂɂȂ�
�Փ˂��邱�Ƃŕό`���A����ɂ���ĔS�e������������`�ɕω�����
�ꍇ�Ȃǂ�����ɓ�����B
��̗�Ƃ��Ă͂܂����ɂႮ�ɂႵ�����̂Ȃ牽�ł���������
���ɂ���̓������܂ƕǂ̏Փ˂Ƃ�����Ȃ�
�V�~�����[�V�����̐���ɂ��Ă͑傢�ɔ��_�������Ƃ��낾��
�}AB�̈Ⴂ�̂ق����d�v�Ȃ̂ŕۗ��B
�}AB�̈Ⴂ�̂ق����d�v�Ȃ̂ŕۗ��B
340 �F95=101�F05/01/22 09:43:44 ID:imKUcwij
>>311 �V�~�����[�V�����̐���ɂ��đ傢�ɔ��_�A���ɂ���ĂĂ���B
��}�̃\�t�g���Ȃ��������B����������珟��ɍ폜�����肵�Ă�B
�Ƃ���Ő}�a�̕��́A��_���痼�����o�Ă��邯�ǁA����͎��@�ł͂ł��Ȃ�����A
MIT�́u�G�����v�̕����Ƃ������Ƃł����ˁH�@�ł`�̕��́u�G�L��v�Ƃ������Ƃ�
�����ˁH
��}�̃\�t�g���Ȃ��������B����������珟��ɍ폜�����肵�Ă�B
�Ƃ���Ő}�a�̕��́A��_���痼�����o�Ă��邯�ǁA����͎��@�ł͂ł��Ȃ�����A
MIT�́u�G�����v�̕����Ƃ������Ƃł����ˁH�@�ł`�̕��́u�G�L��v�Ƃ������Ƃ�
�����ˁH
>>340
���Ⴀ�V�~�����[�V�����b�����s���Ă�邯��(���Ƃł���)
����AB�̈Ⴂ�ɂ��ĉ��Ă�����������
>�Ƃ���Ő}�a�̕��́A��_���痼�����o�Ă��邯�ǁA����͎��@�ł͂ł��Ȃ�����A
�ʂɋ@�\�������ƍH�v����Ύ�����v�����邱�Ƃ��\����
�Ƃ肠����B��MIT-3D-biped��͂������̂��ƍl���ė~����
>>A�͏d�S���ی^�̍���������ċr�ƂȂ����Ă���
�r�́ۂ̉��_�̍��E�[�ɕt����������
>>B��MIT��3D-Biped�Ɠ������d�S�����ڋr�ƂȂ����Ă���
�r�͏d�S�̂������ɕt���������藼�r�̕t�����͂قړ����Ƃ���ɂ���
>MIT�́u�G�����v�̕����Ƃ������Ƃł����ˁH�@�ł`�̕��́u�G�L��v�Ƃ������Ƃ�
>�����ˁH
�悭�Ȃ��B>>321�ɂ�����悤��
>>�r�͕t���������[�܂ł̒�������ъp�x��ύX�\�Ȏ��R�x������Ă���Ƃ���B
>>(�}�ł͗V�r�ł���E���̋r�͒������k�߂Ă���)
AB�Ƃ��ɋr�̕t�����͑O�㍶�E�ɋr�̌�����ς������]�߂�
�l�Ԃ̂悤�Ȑ܂�Ȃ����̕G�͂Ȃ��A
MIT-3D-biped�̂悤�ɐL�k���̉����ɂ��r����ω������邱�Ƃ��o����
���Ⴀ�V�~�����[�V�����b�����s���Ă�邯��(���Ƃł���)
����AB�̈Ⴂ�ɂ��ĉ��Ă�����������
>�Ƃ���Ő}�a�̕��́A��_���痼�����o�Ă��邯�ǁA����͎��@�ł͂ł��Ȃ�����A
�ʂɋ@�\�������ƍH�v����Ύ�����v�����邱�Ƃ��\����
�Ƃ肠����B��MIT-3D-biped��͂������̂��ƍl���ė~����
>>A�͏d�S���ی^�̍���������ċr�ƂȂ����Ă���
�r�́ۂ̉��_�̍��E�[�ɕt����������
>>B��MIT��3D-Biped�Ɠ������d�S�����ڋr�ƂȂ����Ă���
�r�͏d�S�̂������ɕt���������藼�r�̕t�����͂قړ����Ƃ���ɂ���
>MIT�́u�G�����v�̕����Ƃ������Ƃł����ˁH�@�ł`�̕��́u�G�L��v�Ƃ������Ƃ�
>�����ˁH
�悭�Ȃ��B>>321�ɂ�����悤��
>>�r�͕t���������[�܂ł̒�������ъp�x��ύX�\�Ȏ��R�x������Ă���Ƃ���B
>>(�}�ł͗V�r�ł���E���̋r�͒������k�߂Ă���)
AB�Ƃ��ɋr�̕t�����͑O�㍶�E�ɋr�̌�����ς������]�߂�
�l�Ԃ̂悤�Ȑ܂�Ȃ����̕G�͂Ȃ��A
MIT-3D-biped�̂悤�ɐL�k���̉����ɂ��r����ω������邱�Ƃ��o����
342 �F95=101�F05/01/22 12:43:05 ID:imKUcwij
��V�Ȃ�������B�ŏ����炻�ꂾ�������Ƃ��Ă�����b�͑����������̂��B
�܂���蒼������B�v�����MIT-3D-biped�Ƌ@�B�Z�p���̊��c���̃S�b�c�C
�G�������{�b�g�̈Ⴂ�A�݂����ȃ�����ˁB
�܂���蒼������B�v�����MIT-3D-biped�Ƌ@�B�Z�p���̊��c���̃S�b�c�C
�G�������{�b�g�̈Ⴂ�A�݂����ȃ�����ˁB
343 �F���J�����������F05/01/23 10:36:58 ID:u9VWJ50k
�I�b�X�I�I�����B
���A�������[�����z�Ɛ���ĂČ����ʂ����ׂ�
�݂�Ȃ��班�����������ė~�����B
�ȉ��̌����Ɉ�l�T�O�O�O�~�U�荞��ł���I�����V�N�I
���R��s�@�����x�X�@�����ԍ��Q�O�O�S�@�P�P�P�W�O�X�O�P
���A�������[�����z�Ɛ���ĂČ����ʂ����ׂ�
�݂�Ȃ��班�����������ė~�����B
�ȉ��̌����Ɉ�l�T�O�O�O�~�U�荞��ł���I�����V�N�I
���R��s�@�����x�X�@�����ԍ��Q�O�O�S�@�P�P�P�W�O�X�O�P
344 �F95=101�F05/01/24 13:52:07 ID:S818CbvL
>>311 ���炭���҂������܂����B�y�j�̖邩�����̔ӂ܂ŏo�Ă���܂�������ŁB
�Ƃ肠�����T�����x�ɂ��Ă����܂����B�܂���������Ƃɘb���ł�����A�Ǝv���܂��B
���i�͂͂����Ɍ������ꍇ�́A�}�a�A�Ƃ������MIT�́u�҂��҂��N���Q�v�́w���̌`�x��
�K�v�s�����Ƃ��������ł��B�w���̌`�x�Ƃ����̂́A�}�a�̂悤�ɁA�����d�S����r���o�Ă��邾���A
�ł͂Ȃ��A���ɑ傫�Ȑ����̊������[�����g���������`��Ɍ���A�Ƃ������Ƃł��B
�}���A�b�v���Ă����܂�������A�E�C���h�E��������J���Ĉꏏ�Ɍ��Ȃ���ǂ�ʼn������B
ttp://jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/vwp?.dir=/%a5%ed%a5%dc%a5%c3%
a5%c8%c1%f6%a4%ec&.dnm=%bf%de%a3%b1%a1%c1%a3%b4.jpg&.src=bc&.view=l&.done=http
%3a//jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/lst%3f%26.dir=/%25a5%25ed%25a5%
25dc%25a5%25c3%25a5%25c8%25c1%25f6%25a4%25ec%26.src=bc%26.view=l
MIT�́u�҂��҂��N���Q�v�̂悤�ɁA�d�S�̈ʒu�ɋ߂��Ƃ��납����ˏ�Ɂw�́x�A�܂�
�G�߂̖����P�Ȃ�_��˂��o���A�P���ȍ�p����p�̖@���ŁA�n�ʂ���w�d�S�ɋ߂��ʒu�x��
�X�g���[�g�ɔ��͂��Ԃ��Ă���B�}�P
�N���Q�́w�Ҋ߁x�͏d�S������ō��E�ɂ킸���ł��Ԋu������̂ŁA���͂��Ԃ��Ă���ꏊ��
���S�ɏd�S�Ɉ�v���Ă��Ȃ����Ƃɂ��w�˂���x���N����B���̂˂��ꂪ�p����s����ɂ���v����
�Ȃ�̂����A�Q�́u�Ҋ߁v�̊Ԋu��蓪�̕������͂邩�ɑ傫���āA�܂��r�̏d����艽�{���d��
�̂ŁA�Ҋ߂Ő�����u�������������[�����g���������w�˂���x�̗́v�́A�������[�����g���d�����A
�͂邩�ɑ傫�����̕����ŋz�����Ă��܂���B�}�Q
�`�̏ꍇ�AB�����u�Ҋ߁v�̊Ԋu�͍L���̂Ŕ��͂ɂ��w�˂���x�̊������[�����g�͑傫���B
�Ҋ߂̊Ԋu�Əd�S�̂��镔���̑傫���͐}���琳�m�ɓǂݎ�邱�Ƃ͂ł��Ȃ����A�Q�{�̋r�ƁA
�������̕����̎��ʂ⊵�����[�����g�ɂ́u���{�v�Ƃ����悤�ȍ��͂Ȃ����̂ƍl����B
���̏�Ԃő����s������ƌҊ߂ɒn�ʂ���̔��͂��߂��Ă��邱�ƂŐ�����w�˂���x��
�P���ȉ�(����)�����̂˂���ł͂Ȃ��A�c���̂R�����̂˂���ɂȂ�B
�}�R
�c�����́u��̂��̂����点��v�����̉�]�́A�Ҋ߂���d�S�܂ł̋������傫�������ꉞ�A
�z�����₷�����A���ʂ͂₽��ɓ��̒������{�b�g�Ȃ�����肵�Ȃ��̂ŁA�c�̕�����
��]���p����s����ɂ���v���ɂȂ�B�a�̕��ɂ��u��̂��̂����点��v�����̉�]�͋N���邪�A
�~�Ռ^�őO��ɂ��傫�����ƂŁA���̌����̉�]�̋z���ɂ��Ή��ł���B
�܂��A�a�GMIT�N���Q�ł́A�r�Ő����Ă���u�˂���v�́A�ׂ��r��艽�{���傫�Ȏ��ʂƊ���
���[�����g������ �u�ό`���Ȃ��f�J�C�ł܂�v�ŁA�u�҂����Ȃ��v�ŋz���ł��邪�A�`�̏ꍇ��
�㔼�g�̍����ɉ����āA�킸���ɒx��ď�̕��ɂ˂��ꂪ�`���B����������͓`��邾����
�u����Ӱ��āv�ɑ傫�ȍ����������Ƃ��A�p����s����ɂ���˂���̋z��������ɂ��Ă���B
�`�̂悤�ȕG�̖����V�����_�[�^�̃��{�b�g�Ƃ����̂͂��܂茩�邱�Ƃ͖����̂Ŋ��c����
�u�����g���v�̃S�b�c�C�̂��Ɏ��ƁA�o�����X����邽�߂ɍ������ɂ���d��͓���
�傫���킯�ł͂Ȃ��A�܂����E�ɗh��邾���̂悤�Ȃ̂ŁA���������̂˂���ɂ͎ア�͂��ł���B
���c���̃V�����_�[�^�̂��̉����g�̃S�c���́A���������˂�����d�����r�ɂ���ċz������
�ړI������̂��낤�Ǝv���B���̃��{�b�g�̎��ۂ̏d�S�͂`�̂悤�ɌҊ߂ɏ�������Ă����
�ł͂Ȃ��A�����Ɖ��̕��ɂ���͂��ł���B
�Ƃ肠�����T�����x�ɂ��Ă����܂����B�܂���������Ƃɘb���ł�����A�Ǝv���܂��B
���i�͂͂����Ɍ������ꍇ�́A�}�a�A�Ƃ������MIT�́u�҂��҂��N���Q�v�́w���̌`�x��
�K�v�s�����Ƃ��������ł��B�w���̌`�x�Ƃ����̂́A�}�a�̂悤�ɁA�����d�S����r���o�Ă��邾���A
�ł͂Ȃ��A���ɑ傫�Ȑ����̊������[�����g���������`��Ɍ���A�Ƃ������Ƃł��B
�}���A�b�v���Ă����܂�������A�E�C���h�E��������J���Ĉꏏ�Ɍ��Ȃ���ǂ�ʼn������B
ttp://jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/vwp?.dir=/%a5%ed%a5%dc%a5%c3%
a5%c8%c1%f6%a4%ec&.dnm=%bf%de%a3%b1%a1%c1%a3%b4.jpg&.src=bc&.view=l&.done=http
%3a//jp.y42.briefcase.yahoo.co.jp/bc/jjnby475/lst%3f%26.dir=/%25a5%25ed%25a5%
25dc%25a5%25c3%25a5%25c8%25c1%25f6%25a4%25ec%26.src=bc%26.view=l
MIT�́u�҂��҂��N���Q�v�̂悤�ɁA�d�S�̈ʒu�ɋ߂��Ƃ��납����ˏ�Ɂw�́x�A�܂�
�G�߂̖����P�Ȃ�_��˂��o���A�P���ȍ�p����p�̖@���ŁA�n�ʂ���w�d�S�ɋ߂��ʒu�x��
�X�g���[�g�ɔ��͂��Ԃ��Ă���B�}�P
�N���Q�́w�Ҋ߁x�͏d�S������ō��E�ɂ킸���ł��Ԋu������̂ŁA���͂��Ԃ��Ă���ꏊ��
���S�ɏd�S�Ɉ�v���Ă��Ȃ����Ƃɂ��w�˂���x���N����B���̂˂��ꂪ�p����s����ɂ���v����
�Ȃ�̂����A�Q�́u�Ҋ߁v�̊Ԋu��蓪�̕������͂邩�ɑ傫���āA�܂��r�̏d����艽�{���d��
�̂ŁA�Ҋ߂Ő�����u�������������[�����g���������w�˂���x�̗́v�́A�������[�����g���d�����A
�͂邩�ɑ傫�����̕����ŋz�����Ă��܂���B�}�Q
�`�̏ꍇ�AB�����u�Ҋ߁v�̊Ԋu�͍L���̂Ŕ��͂ɂ��w�˂���x�̊������[�����g�͑傫���B
�Ҋ߂̊Ԋu�Əd�S�̂��镔���̑傫���͐}���琳�m�ɓǂݎ�邱�Ƃ͂ł��Ȃ����A�Q�{�̋r�ƁA
�������̕����̎��ʂ⊵�����[�����g�ɂ́u���{�v�Ƃ����悤�ȍ��͂Ȃ����̂ƍl����B
���̏�Ԃő����s������ƌҊ߂ɒn�ʂ���̔��͂��߂��Ă��邱�ƂŐ�����w�˂���x��
�P���ȉ�(����)�����̂˂���ł͂Ȃ��A�c���̂R�����̂˂���ɂȂ�B
�}�R
�c�����́u��̂��̂����点��v�����̉�]�́A�Ҋ߂���d�S�܂ł̋������傫�������ꉞ�A
�z�����₷�����A���ʂ͂₽��ɓ��̒������{�b�g�Ȃ�����肵�Ȃ��̂ŁA�c�̕�����
��]���p����s����ɂ���v���ɂȂ�B�a�̕��ɂ��u��̂��̂����点��v�����̉�]�͋N���邪�A
�~�Ռ^�őO��ɂ��傫�����ƂŁA���̌����̉�]�̋z���ɂ��Ή��ł���B
�܂��A�a�GMIT�N���Q�ł́A�r�Ő����Ă���u�˂���v�́A�ׂ��r��艽�{���傫�Ȏ��ʂƊ���
���[�����g������ �u�ό`���Ȃ��f�J�C�ł܂�v�ŁA�u�҂����Ȃ��v�ŋz���ł��邪�A�`�̏ꍇ��
�㔼�g�̍����ɉ����āA�킸���ɒx��ď�̕��ɂ˂��ꂪ�`���B����������͓`��邾����
�u����Ӱ��āv�ɑ傫�ȍ����������Ƃ��A�p����s����ɂ���˂���̋z��������ɂ��Ă���B
�`�̂悤�ȕG�̖����V�����_�[�^�̃��{�b�g�Ƃ����̂͂��܂茩�邱�Ƃ͖����̂Ŋ��c����
�u�����g���v�̃S�b�c�C�̂��Ɏ��ƁA�o�����X����邽�߂ɍ������ɂ���d��͓���
�傫���킯�ł͂Ȃ��A�܂����E�ɗh��邾���̂悤�Ȃ̂ŁA���������̂˂���ɂ͎ア�͂��ł���B
���c���̃V�����_�[�^�̂��̉����g�̃S�c���́A���������˂�����d�����r�ɂ���ċz������
�ړI������̂��낤�Ǝv���B���̃��{�b�g�̎��ۂ̏d�S�͂`�̂悤�ɌҊ߂ɏ�������Ă����
�ł͂Ȃ��A�����Ɖ��̕��ɂ���͂��ł���B
�����͂���J�l�ł������{�f�B�̌`����Ⴆ�ĉ��肳��Ă���Ƃ�
�C�t���܂���ł���
���̂܂܉��Ă������̂ł������m������������
�u�{�f�B�E�r�̍\�����x�͂܂���������ŋr�̎��t���ʒu�������傫���Ⴄ�v
�Ƃ����O��̂��ƂɂĂ�����x���������������܂���ł��傤��
�C�t���܂���ł���
���̂܂܉��Ă������̂ł������m������������
�u�{�f�B�E�r�̍\�����x�͂܂���������ŋr�̎��t���ʒu�������傫���Ⴄ�v
�Ƃ����O��̂��ƂɂĂ�����x���������������܂���ł��傤��
346 �F95=101�F05/01/24 23:24:03 ID:S818CbvL
�͂��H�c�u�{�f�B�E�r�̍\�����x�͂܂���������Łv�Ƃ������Ƃ́A�N���Q�^��
�������Ă��ƁH�@����Ƃ��N���Q�^�̂܂�Ɏ����グ��́H
�ł�327�Łu���̌`���Ă͉̂����Ӗ����Ă���̂��H�v���ĕ�����
���邶��ȁ`���H�@�u���̌`�v�̓N���Q�^�̘b����B
�������Ă��ƁH�@����Ƃ��N���Q�^�̂܂�Ɏ����グ��́H
�ł�327�Łu���̌`���Ă͉̂����Ӗ����Ă���̂��H�v���ĕ�����
���邶��ȁ`���H�@�u���̌`�v�̓N���Q�^�̘b����B
���Ⴀ���̂��u�N���Q�^�v�ł��肳������A
�r�̎��t���ʒu�͊W�Ȃ��Ƃ������ƁH
�r�̎��t���ʒu�͊W�Ȃ��Ƃ������ƁH
348 �F95=101�F05/01/25 00:20:59 ID:0gd/Y0OE
����A�u�N���Q�^�v�ŁA���r�����̈ʒu�Ɏ��t�����Ă��邱�Ƃ��A���͂Ői��
���߂̏����Ȃ�ł���BMIT�����̌`�Ŏ����@��������͈̂Ӗ��������������Ƃ���
�Ƃ������ƁB�ł��A����͕������Ƃ͂ł��Ȃ��B�s�����s�������ѐ�p�B
���߂̏����Ȃ�ł���BMIT�����̌`�Ŏ����@��������͈̂Ӗ��������������Ƃ���
�Ƃ������ƁB�ł��A����͕������Ƃ͂ł��Ȃ��B�s�����s�������ѐ�p�B
�ł͐}�ł��������O����ɁB
(A)
�@�@�@��
�@�@�@ |
���P�P
| |
| |
.|
.|
��
(B)
�@�@�@��
�@�@ ��
�@�@ /�@
�@ / /
�@/ /�@�@�@
�@/
./
��
�}AB�Ƃ��ɁA���͏d�S�A���͐ڒn���ʂ̒n��
���͐}�̕`����Ă��镽�ʂɑ��ĉ����ȉ�]����������]���R�x
�����\�\ �͐L�k���R�x��������r�B
�}B�ł͂��̋r���꒼���ɏd�S�Ɛڒn���ʂ�����ł���A
�}A�ł͂��̋r�͏d�S�Ƃ͈Ⴄ�����ł���^��ɐL�тĐ܂�Ȃ��������
�d�S�ƌq�����Ă���B
���āA�ڒn���ʂ���d�S���������̉��������ł���E������ւ̗͂�
�d�S�ɉ��������B
>>348�ق���95�̘b�ɂ���
�}B�ł���ΐL�k���R�x��L�����Ƃŗe�Ղɂ��ꂪ�\�B
�����Đ}A�ł͕s�\�B
���Ă��Ƃł������ȁH
(A)
�@�@�@��
�@�@�@ |
���P�P
| |
| |
.|
.|
��
(B)
�@�@�@��
�@�@ ��
�@�@ /�@
�@ / /
�@/ /�@�@�@
�@/
./
��
�}AB�Ƃ��ɁA���͏d�S�A���͐ڒn���ʂ̒n��
���͐}�̕`����Ă��镽�ʂɑ��ĉ����ȉ�]����������]���R�x
�����\�\ �͐L�k���R�x��������r�B
�}B�ł͂��̋r���꒼���ɏd�S�Ɛڒn���ʂ�����ł���A
�}A�ł͂��̋r�͏d�S�Ƃ͈Ⴄ�����ł���^��ɐL�тĐ܂�Ȃ��������
�d�S�ƌq�����Ă���B
���āA�ڒn���ʂ���d�S���������̉��������ł���E������ւ̗͂�
�d�S�ɉ��������B
>>348�ق���95�̘b�ɂ���
�}B�ł���ΐL�k���R�x��L�����Ƃŗe�Ղɂ��ꂪ�\�B
�����Đ}A�ł͕s�\�B
���Ă��Ƃł������ȁH
350 �F95=101�F05/01/25 01:32:21 ID:0gd/Y0OE
�c�ȂA�`�̕����悭�����ł��Ȃ�����ǁA�ꉞ����ł������Ă��Ƃɂ��Ęb����
�i�߂Ă݂Ă�B
�i�߂Ă݂Ă�B
351 �F���J�����������F05/01/25 22:51:41 ID:PcGTzOZD
�ȂX���悭�ǂ�łȂ����b���������킩��Ȃ�����
�����Ȃ玨���v�邾��
���Ɍۖ�����Ȃ��ĎO���K�ǂ̂ق�
�����Ȃ玨���v�邾��
���Ɍۖ�����Ȃ��ĎO���K�ǂ̂ق�
�u�ꉞ�v�ł͍���̂Ő}A���킩��₷�����ς����
(A)
���\�\��
.|
.|
| |
| |
.|
.|
��
�}���>>349�Q�ƁB
�}A�ł͋r��(�ڒn���ʂ��猩��)�d�S�Ƃ͈Ⴄ�����ł���
�^��ɂ܂��L�тāA��]���R�x����Đ܂�Ȃ��������
�d�S�Ɛڑ�����Ă���B
�ڒn���ʂ���d�S���������̉��������ł���E������ւ̗͂��d�S�ɉ��������B
�}B�ł���ΐL�k���R�x��L�����Ƃŗe�Ղɂ��ꂪ�\�B�����Đ}A�ł͕s�\�B
���Ă��Ƃł������ȁH
(A)
���\�\��
.|
.|
| |
| |
.|
.|
��
�}���>>349�Q�ƁB
�}A�ł͋r��(�ڒn���ʂ��猩��)�d�S�Ƃ͈Ⴄ�����ł���
�^��ɂ܂��L�тāA��]���R�x����Đ܂�Ȃ��������
�d�S�Ɛڑ�����Ă���B
�ڒn���ʂ���d�S���������̉��������ł���E������ւ̗͂��d�S�ɉ��������B
�}B�ł���ΐL�k���R�x��L�����Ƃŗe�Ղɂ��ꂪ�\�B�����Đ}A�ł͕s�\�B
���Ă��Ƃł������ȁH
353 �F���J�����������F05/01/25 22:56:59 ID:OtVP1wbt
���̂��Ƙb���Ă��邩�S�R������Ȃ����ǁA�撣���Ă���B
���Ƒ��̎w�Ɏ���đ���߂��K�v
���̎w�������Ƒ��̎w�藎�Ƃ������Ɩ�������킩��Ǒ��������Ă��Ȃ�
���ꂪ��������A�V�������̂ɂƂĂ���J���Ă�Ǝv��
�������ƔF�����邽�߂܂������ǂ�ȏ�ԂȂ̂����Ƃ̋����͂ǂꂭ�炢����Ă�̂���
�F������V�X�e����
���̂��߂̓�̃J�����������g���o���Ă������M�ł��鎨���K�v
���̎w�������Ƒ��̎w�藎�Ƃ������Ɩ�������킩��Ǒ��������Ă��Ȃ�
���ꂪ��������A�V�������̂ɂƂĂ���J���Ă�Ǝv��
�������ƔF�����邽�߂܂������ǂ�ȏ�ԂȂ̂����Ƃ̋����͂ǂꂭ�炢����Ă�̂���
�F������V�X�e����
���̂��߂̓�̃J�����������g���o���Ă������M�ł��鎨���K�v
355 �F95=101�F05/01/25 23:49:32 ID:0gd/Y0OE
�������`���A352�ɂ���}�́A�l�Ԍ^�����Q�����s�̃��f�����Ⴀ�Ȃ���ˁH
�l�Ԍ^���Ƃ������ƂȂ獘������O�ɓ|�����N���E�`���O�X�^�C�����Ă��ƂɂȂ��ȁB
���������d�S�̈ʒu�Ȃ�A����242�ŕ��͂ŁA297�ɃA�b�v�����}�Ō����Ă����B
�����āA354����̌�����悤�ɁA����352�̃��f���͗����Ă��邱�Ƃ��������Ƃ�
�ł��Ȃ���B�s�����s�������˂邾���ŁB
�l�Ԍ^���Ƃ������ƂȂ獘������O�ɓ|�����N���E�`���O�X�^�C�����Ă��ƂɂȂ��ȁB
���������d�S�̈ʒu�Ȃ�A����242�ŕ��͂ŁA297�ɃA�b�v�����}�Ō����Ă����B
�����āA354����̌�����悤�ɁA����352�̃��f���͗����Ă��邱�Ƃ��������Ƃ�
�ł��Ȃ���B�s�����s�������˂邾���ŁB
���������邩�ƌ����b�͂��Ă��܂���
���̍\���Ŋ�]����͂������邱�Ƃ��o���邩�ł��Ȃ����Ƃ����b�ł�
���̍\���Ŋ�]����͂������邱�Ƃ��o���邩�ł��Ȃ����Ƃ����b�ł�
357 �F���J�����������F05/01/26 00:09:29 ID:8M0EmWlG
���⤈Ⴄ�ł���Б��݂̂̐}�ŔO����ɏ����Ă��邾����
�킩��₷�����邽�߂ɂ킴�킴���ʐ}�ɂ��Ă���Ă���
�����\���Ŕ��Α���������Ă��Ƃ��낤�B
�����95=101����Ɏ���
���ϑ�̏�𑖂邱�Ƃ����s���邤���ŗ��z�I�Ȃ̂�
���ϑ�̍��E�ɋr�����悤�ȑ���i�\����MIT�̃N���Q�N�͂���������ȁj�̕������z�Ȃ̂�
�ǂ����������́H
�킩��₷�����邽�߂ɂ킴�킴���ʐ}�ɂ��Ă���Ă���
�����\���Ŕ��Α���������Ă��Ƃ��낤�B
�����95=101����Ɏ���
���ϑ�̏�𑖂邱�Ƃ����s���邤���ŗ��z�I�Ȃ̂�
���ϑ�̍��E�ɋr�����悤�ȑ���i�\����MIT�̃N���Q�N�͂���������ȁj�̕������z�Ȃ̂�
�ǂ����������́H
358 �F���J�����������F05/01/26 08:29:05 ID:XvXMCq7S
>>311
�����ŕ�������̘b�����Ȃ����Ă̂͂ǂ����Ǝv�����B
�ォ��Ȃ�₩��Əo���Ă��Ă邪�A����Ȃ͖̂{���S���u�O��v����B
�O������߂Ɍ���Ȃ��Ăǂ�����H
95���̓^�t�Ȃ��l�̂悤������R����������A�l�h�s�́u�N���Q�^�v��
�����Ȃ��Ɖ��x�������Ă��邪�A���̍����͉��Ȃ́H
����ƁA������Ђ��������Ă��邱�Ƃ�������A����O�ɏo��������
�i�ނƂ����̂��A�j���łł���ƌ����Ă����Ȃ���A�j���̓��{�b�g�ɂ�
���ɗ����Ȃ��Ƃ������Ă���͖̂�������H95���̃e�R�̗��_�����{�b�g�ɂ�
���p�ł��Ȃ���Ȃ��̂��H
�����ŕ�������̘b�����Ȃ����Ă̂͂ǂ����Ǝv�����B
�ォ��Ȃ�₩��Əo���Ă��Ă邪�A����Ȃ͖̂{���S���u�O��v����B
�O������߂Ɍ���Ȃ��Ăǂ�����H
95���̓^�t�Ȃ��l�̂悤������R����������A�l�h�s�́u�N���Q�^�v��
�����Ȃ��Ɖ��x�������Ă��邪�A���̍����͉��Ȃ́H
����ƁA������Ђ��������Ă��邱�Ƃ�������A����O�ɏo��������
�i�ނƂ����̂��A�j���łł���ƌ����Ă����Ȃ���A�j���̓��{�b�g�ɂ�
���ɗ����Ȃ��Ƃ������Ă���͖̂�������H95���̃e�R�̗��_�����{�b�g�ɂ�
���p�ł��Ȃ���Ȃ��̂��H
>358
���Ƃ��Ă͕�������̘b���������̂������
�g���Ă��錾�t�̈Ӗ����ǂ��������ɈႤ�炵�����߁A
���̋c�_�ɂ��č��ӂ邽�߂ɂ�
�͂����肳���Ă����˂Ȃ�Ȃ��u�O��v������������܂��B
���́u�O��v�𖾂炩�ɂ��邽�߂�>321���牄�X�Ƃ���Ă���킯�ł���
���ʂƂ��ď�����lj����Ă���悤�ȗ���ɂȂ��Ă��܂����̂�
�f���P�[�g�Ȗ��Ō���̗]�n���Ȃ������߂Ƃ͂����A
���̕\���͂��s�\���ł��邽�߂ł�����܂�����A
���̓_�ɂ��Ă͊F�l�ɂ��l�т��܂�
���Ƃ��Ă͕�������̘b���������̂������
�g���Ă��錾�t�̈Ӗ����ǂ��������ɈႤ�炵�����߁A
���̋c�_�ɂ��č��ӂ邽�߂ɂ�
�͂����肳���Ă����˂Ȃ�Ȃ��u�O��v������������܂��B
���́u�O��v�𖾂炩�ɂ��邽�߂�>321���牄�X�Ƃ���Ă���킯�ł���
���ʂƂ��ď�����lj����Ă���悤�ȗ���ɂȂ��Ă��܂����̂�
�f���P�[�g�Ȗ��Ō���̗]�n���Ȃ������߂Ƃ͂����A
���̕\���͂��s�\���ł��邽�߂ł�����܂�����A
���̓_�ɂ��Ă͊F�l�ɂ��l�т��܂�
360 �F358�F05/01/26 10:13:21 ID:XvXMCq7S
>>359 �u�g���Ă��錾�t�̈Ӗ��������ɈႤ�v���Ă̂́A���Ⴂ��������
�Ȃ��Ă��N�ɂł����邱�Ƃ���H�X�T���͗���̐l���Ƃ������Ƃŏ��߂���
���t�̈Ⴂ�͒f�Ă����A��̓I�ɂǂ̌��t���ǂ��Ȃ̂��H��������
������Ȃ��H�������������������ɂȂ��Ă���ƕ��������ǁA
�ł�����ς�u�͂����肳���Ă����˂Ȃ�Ȃ��O��v���ĉ��Ȃ̂��H��
�ǂݕԂ��Ă݂Ă������̂����B�@
�Ȃ��Ă��N�ɂł����邱�Ƃ���H�X�T���͗���̐l���Ƃ������Ƃŏ��߂���
���t�̈Ⴂ�͒f�Ă����A��̓I�ɂǂ̌��t���ǂ��Ȃ̂��H��������
������Ȃ��H�������������������ɂȂ��Ă���ƕ��������ǁA
�ł�����ς�u�͂����肳���Ă����˂Ȃ�Ȃ��O��v���ĉ��Ȃ̂��H��
�ǂݕԂ��Ă݂Ă������̂����B�@
361 �F95=101�F05/01/27 06:03:47 ID:dBKt3yMr
>>357
���ϑ�̏�𑖂�A�܂�u�꒼����𑖂�v�̃����b�g�Ƃ��āA�u���̎��R�ȃ��[�����O��
�g����̂ō��̕��̕������X�g���C�h(����)����������v�Ƃ������̂����ł��q�ǂ���
�����Ă���u���������v�����܂��ˁB����ɑ��ăj���ł́u���̃��[�����O�̓��_��
�G�l���M�[�����Ղ���̂ŁA����P��Ȃ��Ńj�����ő���A�܂�u���ϑ�̍��E�ɋr��
���悤�ȑ���v������̂��ǂ��A�Ƃ������Ă��܂��B���ۂɂ͈꒼����𑖂낤�ƈӎ�����
�������[�����O�����Ƃ��Ă��A�ڒn�̎��ɂ͍��͂܂������ɖ߂��Ă��܂�����A���̕���
�g���ĕ��������т���͂��܂��A�܂��A�j���Ō����Ă���悤�ȁA�ӎ����č���P����
���낤�Ƃ���I��ȂǁA���Ƃ��Ƃ��܂���B
�ǂ��������z���ƕ�����Ă��ǂ��������z�ł͂���܂���B���[�X�ł͍ŒZ�����𑖂�Ȃ����
�w���x�ł�����A�u�܂������ɑ���v�ׂ��ł͂���܂����A����𑖂邾�̈꒼�����
���邾�̂ƈӎ����邱�Ǝ��̂��]�v�Ȃ��Ƃł��BMIT�̃N���Q�͕ʂɁu�j�����𑖂邽�߂̍\���v
�ɂȂ��Ă���킯�ł͂Ȃ��ł���B�꒼����𑖂�悤�ɐv���ꂽ�\���ł͂Ȃ��Ƃ��������ł��B
�i�}�g�̗���̑I��́A�X�^�[�g��������ɂ͑������E�ɑ傫���J�����肷�邱�Ƃ�����܂����A
�������ɂ͖��ӎ��Ɏ֍s���Ă���������܂��B����͂Ȃ�炩�̕s����ȗv�f�ɐg�̂����ӎ���
�Ή����Ă��邩��ł��B�X�s�[�h���オ��Ί����ɂ���Ē��i���͑����܂����A����o������
�����ɂ����Ă͕s����ȗv�f�ɑΉ����Ȃ���Ȃ�܂���A����Ȏ��Ɉ꒼�����̃j��������
�ӎ����Ă��ăR�P�Ă����̂ł͘b�ɂȂ�܂���ˁB
���ϑ�̏�𑖂�A�܂�u�꒼����𑖂�v�̃����b�g�Ƃ��āA�u���̎��R�ȃ��[�����O��
�g����̂ō��̕��̕������X�g���C�h(����)����������v�Ƃ������̂����ł��q�ǂ���
�����Ă���u���������v�����܂��ˁB����ɑ��ăj���ł́u���̃��[�����O�̓��_��
�G�l���M�[�����Ղ���̂ŁA����P��Ȃ��Ńj�����ő���A�܂�u���ϑ�̍��E�ɋr��
���悤�ȑ���v������̂��ǂ��A�Ƃ������Ă��܂��B���ۂɂ͈꒼����𑖂낤�ƈӎ�����
�������[�����O�����Ƃ��Ă��A�ڒn�̎��ɂ͍��͂܂������ɖ߂��Ă��܂�����A���̕���
�g���ĕ��������т���͂��܂��A�܂��A�j���Ō����Ă���悤�ȁA�ӎ����č���P����
���낤�Ƃ���I��ȂǁA���Ƃ��Ƃ��܂���B
�ǂ��������z���ƕ�����Ă��ǂ��������z�ł͂���܂���B���[�X�ł͍ŒZ�����𑖂�Ȃ����
�w���x�ł�����A�u�܂������ɑ���v�ׂ��ł͂���܂����A����𑖂邾�̈꒼�����
���邾�̂ƈӎ����邱�Ǝ��̂��]�v�Ȃ��Ƃł��BMIT�̃N���Q�͕ʂɁu�j�����𑖂邽�߂̍\���v
�ɂȂ��Ă���킯�ł͂Ȃ��ł���B�꒼����𑖂�悤�ɐv���ꂽ�\���ł͂Ȃ��Ƃ��������ł��B
�i�}�g�̗���̑I��́A�X�^�[�g��������ɂ͑������E�ɑ傫���J�����肷�邱�Ƃ�����܂����A
�������ɂ͖��ӎ��Ɏ֍s���Ă���������܂��B����͂Ȃ�炩�̕s����ȗv�f�ɐg�̂����ӎ���
�Ή����Ă��邩��ł��B�X�s�[�h���オ��Ί����ɂ���Ē��i���͑����܂����A����o������
�����ɂ����Ă͕s����ȗv�f�ɑΉ����Ȃ���Ȃ�܂���A����Ȏ��Ɉ꒼�����̃j��������
�ӎ����Ă��ăR�P�Ă����̂ł͘b�ɂȂ�܂���ˁB
362 �F95=101�F05/01/27 09:14:50 ID:dBKt3yMr
>>358 �l�h�s�́u�N���Q�^�v�������Ȃ��ƌ��������ł��B
323�ŃA�b�v�����}�ŁA���̃N���Q�̂悤�ȍ\���ŁA�q�l���A�悶�ꂪ�z���ł���Ɛ���������ł����A
���͂���́A����ȃs�����s��������̒Z���ڒn�Ȃ�ł́A�̂��ƂŁA�����A�Ƃ�������ł̒���
�ڒn���Ԃł͂ƂĂ��z���������̂ł͂Ȃ���ł���B�܂�A�������[�����g���傫���ނ̓��́A
�������珬�����������[�����g�œ��������Ƃ������A�u�����ɂ����v�����ŁA�S�������Ȃ����P�ł�
�����ĂȂ���ł��B�����Ƃ�������̒��̒����ڒn���Ԃŗ͂�����葱������A����ȑ傫�ȓ��ł�
���n�߂܂��B�܂�A�u�g���v�Ƒ��������āA���͂Ń��W���������Ă��A��肾���̂���u�x���A
���̈�u�̊Ԃɑ����n�ʂ𗣂�ĉ��n�߂Ȃ��܂��̑������n���Ĕ��̌����̃��W����^������B
�ƁA����Ȃ̘̂A���Ȃ�ł��ˁB���̈�u�������ł�����A���͂��`��镔�������≺�ɊO�ꂽ����
�傫�Ȋ������[�����g�����������̂�A�����Ă�����A���̈�u�̃^�C�����O�̌��ʂ邱�Ƃ�
�ł��Ȃ��Ȃ��Ă��܂��킯�ł��B�ŁA����ȑ傫�ȓ��G�傫�Ȋ������[�����g���������������o������
���x�͎~�߂邱�Ƃ͂ł��܂���A�l�h�s�̸ނ͕������Ƃ�����A������݂������Ƃ���ɃO������
����ăK�b�`���[���ƃR�P�Ă��܂���ł���B
�j���̓����l�Ԃ�������ꍇ�ɂ́A���ɐ��i�͂��������郁�J�j�Y�����`������邱�Ƃ������̂ł����A
�u�e�R�̃��J�j�Y���v�́A�߂ɍ��̂悤�ȃ��[�^�[���g���쓮�����ł͏o�����܂���B
���[�^�[�ȊO�͎g�킸�A���͂�����B��̐��i�͂��ƍl���Ă����̂Ȃ�A�u�l�Ԃ̂悤�Ɂv�����đ���
���{�b�g�͉i���Ɏ����s�\�ł��傤�B
323�ŃA�b�v�����}�ŁA���̃N���Q�̂悤�ȍ\���ŁA�q�l���A�悶�ꂪ�z���ł���Ɛ���������ł����A
���͂���́A����ȃs�����s��������̒Z���ڒn�Ȃ�ł́A�̂��ƂŁA�����A�Ƃ�������ł̒���
�ڒn���Ԃł͂ƂĂ��z���������̂ł͂Ȃ���ł���B�܂�A�������[�����g���傫���ނ̓��́A
�������珬�����������[�����g�œ��������Ƃ������A�u�����ɂ����v�����ŁA�S�������Ȃ����P�ł�
�����ĂȂ���ł��B�����Ƃ�������̒��̒����ڒn���Ԃŗ͂�����葱������A����ȑ傫�ȓ��ł�
���n�߂܂��B�܂�A�u�g���v�Ƒ��������āA���͂Ń��W���������Ă��A��肾���̂���u�x���A
���̈�u�̊Ԃɑ����n�ʂ𗣂�ĉ��n�߂Ȃ��܂��̑������n���Ĕ��̌����̃��W����^������B
�ƁA����Ȃ̘̂A���Ȃ�ł��ˁB���̈�u�������ł�����A���͂��`��镔�������≺�ɊO�ꂽ����
�傫�Ȋ������[�����g�����������̂�A�����Ă�����A���̈�u�̃^�C�����O�̌��ʂ邱�Ƃ�
�ł��Ȃ��Ȃ��Ă��܂��킯�ł��B�ŁA����ȑ傫�ȓ��G�傫�Ȋ������[�����g���������������o������
���x�͎~�߂邱�Ƃ͂ł��܂���A�l�h�s�̸ނ͕������Ƃ�����A������݂������Ƃ���ɃO������
����ăK�b�`���[���ƃR�P�Ă��܂���ł���B
�j���̓����l�Ԃ�������ꍇ�ɂ́A���ɐ��i�͂��������郁�J�j�Y�����`������邱�Ƃ������̂ł����A
�u�e�R�̃��J�j�Y���v�́A�߂ɍ��̂悤�ȃ��[�^�[���g���쓮�����ł͏o�����܂���B
���[�^�[�ȊO�͎g�킸�A���͂�����B��̐��i�͂��ƍl���Ă����̂Ȃ�A�u�l�Ԃ̂悤�Ɂv�����đ���
���{�b�g�͉i���Ɏ����s�\�ł��傤�B
363 �F95=101�F05/01/27 09:18:40 ID:dBKt3yMr
360�ɏ�����Ă��邱�Ƃł����A311�������Ă���̂́A�u����O��Ƃ�����悢�̂��H�v��
�T��Ƃ������Ƃł�����A����́u�O��v��ǂݎ�낤�Ƃ��Ă�����Ȃ��͖̂����͂Ȃ��Ǝv���܂���B
����͗v����ɁA���������Ă��邱�Ƃ�311����͈�a���������Ă���Ƃ������Ƃł��傤�B
�������̈�a���̌����Ȃ̂��H�ƍl���Ă݂��̂ł����A���͌����ɑ��݂�����̂ɉ����N���Ă���̂��H
��������l���Ă��Ă�����̂ŁA�ȗ������ꂽ�}�����ōl����̂��s����Ȃ�ł���B���ꂪ�H���Ⴂ
�Ȃ�Ȃ����Ǝv���܂��B
�T��Ƃ������Ƃł�����A����́u�O��v��ǂݎ�낤�Ƃ��Ă�����Ȃ��͖̂����͂Ȃ��Ǝv���܂���B
����͗v����ɁA���������Ă��邱�Ƃ�311����͈�a���������Ă���Ƃ������Ƃł��傤�B
�������̈�a���̌����Ȃ̂��H�ƍl���Ă݂��̂ł����A���͌����ɑ��݂�����̂ɉ����N���Ă���̂��H
��������l���Ă��Ă�����̂ŁA�ȗ������ꂽ�}�����ōl����̂��s����Ȃ�ł���B���ꂪ�H���Ⴂ
�Ȃ�Ȃ����Ǝv���܂��B
364 �F358�F05/01/28 10:57:12 ID:EgRDBjUd
�R��́u��a���v�́A95�������ł���Ȃɕ���̂��H���Ă��Ƃ����ǁB
���t�͕��Ղŕ���Ղ����A����炵�����Ƃ������Ă�悤�����A�M�p����̂�
�s���ȋC������B
���t�͕��Ղŕ���Ղ����A����炵�����Ƃ������Ă�悤�����A�M�p����̂�
�s���ȋC������B
365 �F358�F05/01/28 15:09:03 ID:EgRDBjUd
�s���Ƃ������A95���͗���̐l���Ƃ������ƂȂ�A���@�Ɏ��ۂɐG�ꂽ���Ƃ�
�Ȃ��͂�����H����Ȃ̂ɉ��ł��f������Ō����̂́A���M�ߏ�Ƃ������A
�m��Ȃ��Ă��f���������ĕ�����Ă����قǓV�˂Ȃ킯���H
���̕ӂ������A�ςȊ����Ƃł��������A���܂������Ȃ����A�܂�����Ȋ�����
������Ă��Ƃ�B�@
�Ȃ��͂�����H����Ȃ̂ɉ��ł��f������Ō����̂́A���M�ߏ�Ƃ������A
�m��Ȃ��Ă��f���������ĕ�����Ă����قǓV�˂Ȃ킯���H
���̕ӂ������A�ςȊ����Ƃł��������A���܂������Ȃ����A�܂�����Ȋ�����
������Ă��Ƃ�B�@
366 �F���J�����������F05/01/28 18:34:51 ID:sICzUsA3
>>365
����>>95�̌����ɂ͈��|����̂����Ȃ肠����A�܂��l�I�Ȋ��z�ƌ����̏�ł�
�c�_�͐蕪���悤��(����ɂ��Ă��A���Ղȕ��������Ƃ͓���v���Ȃ��A�A�A)�B
�Ⴆ�A>>95�͎������Ăǂ��v���H
�n��N�̃����N���琬��Ƃ��āAi�Ԗڃ����N�̎��ʁA�d�S�ʒu�����ꂼ��m_i�Ap_i��
����B���̂Ƃ��A�������藧�B
m_0 ( d^2p_0/dt^2 + g ) = F - f_1
m_1 ( d^2p_1/dt^2 + g ) = f_1 - f_2
m_2 ( d^2p_2/dt^2 + g ) = f_2 - f_3
.
.
.
m_N ( d^2p_2/dt^2 + g ) = - f_N
�������ȒP�̂��߂ɁA�n��0�Ԗڃ����N�����Œn�ʂɐڐG���Ă���Ƃ��A����
����悤�ȏꍇ�͍l���Ă��Ȃ�(�\�L���߂�ǂ�����B�������Ă��A�����_��
�O�͂��Ă��Ă��A�{���I�ɂ͕ς��Ȃ�)�Bf_i��i�Ԗڊ߂���i�Ԗڃ����N
�ɓ����́AF��0�Ԗڃ����N���n�ʂ����O�́Ag�͏d�͉����x�B
���āA������S�������Ă݂�B
��_{i=0}^{N} m_i ( d^2p_i/dt^2 + g ) = F
�S�����N���ʘa��m�A�S�̂̏d�S��p�Ƃ���ƁA��`���
m = ��_{i=0}^{N} m_i
m d^2p/dt^2 = ��_{i=0}^{N} m_i d^2p_i/dt^2
�����
m ( d^2p/dt^2 + g ) = F
�������番���邱�ƁB
1.���ꂼ��̊߂��ǂ̂悤�ȗ͂��o���Ă��悤���A���͂͑S�đ��E�����B
�c��̂͒n�ʂ����O�͂����B
2.�O��&�d�͂Ƃ肠�������x�͏d�S�ɔ�������B
�d�S���v������̂͊m���ɓ�����ǁA�g�̑S�̂ɋN�����Ă��邱�Ƃ́A�O�͂ɂ����
�d�S�����i�^������A�������ꂾ�����B���������肩�A���̂��e���̂��A���[�^���ؓ�
���Ƃ������́A���̎��ɂ͈�؏o�Ă��Ȃ��B
���_�͒�ʓI�ɗ��ށB����I�Ȕᔻ�͍��������������Ȃ̂Ŕr���̕����ŁB
����>>95�̌����ɂ͈��|����̂����Ȃ肠����A�܂��l�I�Ȋ��z�ƌ����̏�ł�
�c�_�͐蕪���悤��(����ɂ��Ă��A���Ղȕ��������Ƃ͓���v���Ȃ��A�A�A)�B
�Ⴆ�A>>95�͎������Ăǂ��v���H
�n��N�̃����N���琬��Ƃ��āAi�Ԗڃ����N�̎��ʁA�d�S�ʒu�����ꂼ��m_i�Ap_i��
����B���̂Ƃ��A�������藧�B
m_0 ( d^2p_0/dt^2 + g ) = F - f_1
m_1 ( d^2p_1/dt^2 + g ) = f_1 - f_2
m_2 ( d^2p_2/dt^2 + g ) = f_2 - f_3
.
.
.
m_N ( d^2p_2/dt^2 + g ) = - f_N
�������ȒP�̂��߂ɁA�n��0�Ԗڃ����N�����Œn�ʂɐڐG���Ă���Ƃ��A����
����悤�ȏꍇ�͍l���Ă��Ȃ�(�\�L���߂�ǂ�����B�������Ă��A�����_��
�O�͂��Ă��Ă��A�{���I�ɂ͕ς��Ȃ�)�Bf_i��i�Ԗڊ߂���i�Ԗڃ����N
�ɓ����́AF��0�Ԗڃ����N���n�ʂ����O�́Ag�͏d�͉����x�B
���āA������S�������Ă݂�B
��_{i=0}^{N} m_i ( d^2p_i/dt^2 + g ) = F
�S�����N���ʘa��m�A�S�̂̏d�S��p�Ƃ���ƁA��`���
m = ��_{i=0}^{N} m_i
m d^2p/dt^2 = ��_{i=0}^{N} m_i d^2p_i/dt^2
�����
m ( d^2p/dt^2 + g ) = F
�������番���邱�ƁB
1.���ꂼ��̊߂��ǂ̂悤�ȗ͂��o���Ă��悤���A���͂͑S�đ��E�����B
�c��̂͒n�ʂ����O�͂����B
2.�O��&�d�͂Ƃ肠�������x�͏d�S�ɔ�������B
�d�S���v������̂͊m���ɓ�����ǁA�g�̑S�̂ɋN�����Ă��邱�Ƃ́A�O�͂ɂ����
�d�S�����i�^������A�������ꂾ�����B���������肩�A���̂��e���̂��A���[�^���ؓ�
���Ƃ������́A���̎��ɂ͈�؏o�Ă��Ȃ��B
���_�͒�ʓI�ɗ��ށB����I�Ȕᔻ�͍��������������Ȃ̂Ŕr���̕����ŁB
367 �Faibo���Y�F05/01/28 18:54:42 ID:jcBzEPgu
368 �Faibo���Y�F05/01/28 18:55:31 ID:jcBzEPgu
����������܂���
http://www.honda.co.jp/ASIMO/
http://www.honda.co.jp/ASIMO/
369 �F���J�����������F05/01/28 23:42:47 ID:XFkVn/8H
370 �F�X�T�F05/01/29 06:50:46 ID:njRGvkfu
>>369 �m���ɓ��������͂Ȃ��ł��ˁB311���̐}�͂ǂ�ǂ�ς���Ă��Ă邵�A�����Ă邱�Ƃ�
�ォ��ォ����܍��킹�̌���������Ă��Ă܂�����A�ǂ������悤�Ɓu��o���W�����P���v
�u�g�������v�������̂͌��������ł�����ˁB������Ȃ�Ƃ����ē����Ȃ��Ⴂ���Ȃ�(��)
352�̐}��356�ɏ����Ă���u��]����͂��ł��邩�H�v�Ȃ�A�����ɂ͓��R�u�ł��Ȃ��v�ł��B
352�̐}�́u�ł���Ɖ��肷�邽�߂̐}�v�ł���B�Ⴆ�A�l�h�s�̊w�����A�L�яk�݂��鑫��
�g���ĂQ�����s���{�b�g����낤�Ǝv���������ɁA�u����ȕ��ɂ�����A�ł���͂����v�Ƃ���
���@�����n�߂�A���̊�ɂ���悤�Ȑ}�ł���B�ŁA����Ă݂���_�����ƕ���B���ꂩ�炠��
�N���Q�^�ɂ��ǂ���܂ł̎��s���낪�n�܂�A�ƁA�Q�����s���{�b�g�̌������x���Ƃ��Ă�
��ԉ��̒i�K�̐}���Ƃ������Ƃł��B�u��]����͂������ł���v�ƁA�v�����ނ��߂̐}�ł���B
�ォ��ォ����܍��킹�̌���������Ă��Ă܂�����A�ǂ������悤�Ɓu��o���W�����P���v
�u�g�������v�������̂͌��������ł�����ˁB������Ȃ�Ƃ����ē����Ȃ��Ⴂ���Ȃ�(��)
352�̐}��356�ɏ����Ă���u��]����͂��ł��邩�H�v�Ȃ�A�����ɂ͓��R�u�ł��Ȃ��v�ł��B
352�̐}�́u�ł���Ɖ��肷�邽�߂̐}�v�ł���B�Ⴆ�A�l�h�s�̊w�����A�L�яk�݂��鑫��
�g���ĂQ�����s���{�b�g����낤�Ǝv���������ɁA�u����ȕ��ɂ�����A�ł���͂����v�Ƃ���
���@�����n�߂�A���̊�ɂ���悤�Ȑ}�ł���B�ŁA����Ă݂���_�����ƕ���B���ꂩ�炠��
�N���Q�^�ɂ��ǂ���܂ł̎��s���낪�n�܂�A�ƁA�Q�����s���{�b�g�̌������x���Ƃ��Ă�
��ԉ��̒i�K�̐}���Ƃ������Ƃł��B�u��]����͂������ł���v�ƁA�v�����ނ��߂̐}�ł���B
371 �F�X�T�F05/01/29 06:53:03 ID:njRGvkfu
366�̉^���������Ɋւ��ẮA���ꂪ�����Ӗ�����̂�����܂���B�S��������ȉ���ł����Ȃ��A
�����N�ƌ����Ă����ĂȂ��Ƃ��Ȃ�A����̓w�r�݂����ȕ��ł����A���[���ǂ��Ȃ��Ă���
�̂��Ƃ������Ƃ�����܂���B�܂��l�̂̂悤�Ȃ��̂ł͖������낤�Ƃ������Ƃ����͂��낤����
����܂����A����Łu���i���Ă���̂�����v�ƌ����Ă��u���A�����B����Ɍ����ĂȃT�C�v��
���������Ȃ��ł��ˁB
�ʓ|������Ƃ��A�������Ƃ��Ŏc���Ă��������̂���ł��������烍�{�b�g�̓R�P�܂���B
�����c�����ɂ�����Ƃ��Ă��u�l�Ԃ̂悤�ɕ����đ��郍�{�b�g�v���ł���Ƃ͌���܂��ǂˁB
>>358 �f��������C�ɓ���Ȃ��Ƃ������Ƃł�����A�C������悤�ɂ������Ǝv���܁`���B
���͂����ƃi�}�g�̐l�Ԃ̉^���ɋN���錻�ۂ�O��I�ɗ͊w�Ő�������悤�ɂ��Ă��܂�������A
�͊w���g�����l�����ł́A��ʂ̕��Ƃ̃M���b�v�͑����傫����ł��傤�B358��366�̊Ԃɂ�
���̕������Ղ��ۂ��Ƃ����M���b�v������悤�ł�����A�R�R�����ĕ���Ղ����˂Ȃ���
�v���܂��B
�����N�ƌ����Ă����ĂȂ��Ƃ��Ȃ�A����̓w�r�݂����ȕ��ł����A���[���ǂ��Ȃ��Ă���
�̂��Ƃ������Ƃ�����܂���B�܂��l�̂̂悤�Ȃ��̂ł͖������낤�Ƃ������Ƃ����͂��낤����
����܂����A����Łu���i���Ă���̂�����v�ƌ����Ă��u���A�����B����Ɍ����ĂȃT�C�v��
���������Ȃ��ł��ˁB
�ʓ|������Ƃ��A�������Ƃ��Ŏc���Ă��������̂���ł��������烍�{�b�g�̓R�P�܂���B
�����c�����ɂ�����Ƃ��Ă��u�l�Ԃ̂悤�ɕ����đ��郍�{�b�g�v���ł���Ƃ͌���܂��ǂˁB
>>358 �f��������C�ɓ���Ȃ��Ƃ������Ƃł�����A�C������悤�ɂ������Ǝv���܁`���B
���͂����ƃi�}�g�̐l�Ԃ̉^���ɋN���錻�ۂ�O��I�ɗ͊w�Ő�������悤�ɂ��Ă��܂�������A
�͊w���g�����l�����ł́A��ʂ̕��Ƃ̃M���b�v�͑����傫����ł��傤�B358��366�̊Ԃɂ�
���̕������Ղ��ۂ��Ƃ����M���b�v������悤�ł�����A�R�R�����ĕ���Ղ����˂Ȃ���
�v���܂��B
>370
���������肪�Ƃ��������܂��B
���X�T����̎v�z�ɂ��Ă�����̗���������Ă��Ȃ��������Ƃ��m�F�ł��܂���
���A�g�������Ƃ�����̂��A���Ȃ̂�
�ق��̕��ɂ������ݖ�ɓ����Ă���������Ƃ��肪�����ł�
���������肪�Ƃ��������܂��B
���X�T����̎v�z�ɂ��Ă�����̗���������Ă��Ȃ��������Ƃ��m�F�ł��܂���
���A�g�������Ƃ�����̂��A���Ȃ̂�
�ق��̕��ɂ������ݖ�ɓ����Ă���������Ƃ��肪�����ł�
�^�₻�̂P�@���s�ɍł��K���Ă���g�̍\���͎��̂����̂ǂ�H
�E�q�g
�E�_�`���E
�E�J���K���[
�E���̑�
�^�₻�̂Q�@�q�g�̐g�̂ŁA�ł����������̌^�i����r�̒���etc�j�́H
�i�������g��180cm�Ƃ���j
�X���̗��ꖳ���ŽϿ�B
�E�q�g
�E�_�`���E
�E�J���K���[
�E���̑�
�^�₻�̂Q�@�q�g�̐g�̂ŁA�ł����������̌^�i����r�̒���etc�j�́H
�i�������g��180cm�Ƃ���j
�X���̗��ꖳ���ŽϿ�B
374 �F���J�����������F05/01/29 13:59:37 ID:seSUHTM3
>>362
���̃N���Q�݂����Ȃ̂�������悤�Ƃ��������͂������݂�������B
�m���A�u�|�n�^�v�Ƃ������ꂾ�����悤�ȁB
���ہA�����|�n�����ĕ����l�Ԃ́A�N���Q���f���ɋ߂Â��Ǝv������A
��ɕ����Ȃ����Ă��Ƃ��Ȃ��̂ł́B
���̃N���Q�݂����Ȃ̂�������悤�Ƃ��������͂������݂�������B
�m���A�u�|�n�^�v�Ƃ������ꂾ�����悤�ȁB
���ہA�����|�n�����ĕ����l�Ԃ́A�N���Q���f���ɋ߂Â��Ǝv������A
��ɕ����Ȃ����Ă��Ƃ��Ȃ��̂ł́B
375 �F���J�����������F05/01/29 17:41:55 ID:j+aYlPFM
>>371
����ǂ͂ǂ�ȃg���f�����_�����Ă��邩�Ɗy���݂ɂ��Ă���A�A�A�����������B
���疳�p�������܂ł�����A�����������Ȃ��ȁB�܂��A������Ă���B
����ǂ͂ǂ�ȃg���f�����_�����Ă��邩�Ɗy���݂ɂ��Ă���A�A�A�����������B
���疳�p�������܂ł�����A�����������Ȃ��ȁB�܂��A������Ă���B
376 �F�X�T�F05/01/29 23:17:59 ID:njRGvkfu
>>375 �L�~�������ȁB�l�̂̉^��������Ȏ��ŕ\����Ǝv���Ă�̂Ȃ�A�܂����߂ł������Ƃ���B
>>374 �|�n�ł����B��������MIT�ł��ˁB�����炭���̌�ŁA�G�̂���N���Q�ɂ�����ł��傤�B
�|�n�Ƃ����̂́A�l�Ԃ�����Đ��䂵�Ă܂�����A������Ƃ₻���Ƃł̓��{�b�g�Ƀ}�l������g�R��
�܂ōs���Ȃ��ł��ˁB�����|�n���ƌ����ڂɂ͏d�S�̈ʒu�Ƃ��r�̉^���Ƃ����߂��悤�Ɏv���܂����A
�l�Ԃ̑�������Ă��镔�����G�̖�ڂ�����̂ŁA�G�����̃s�����s�����Ƃ͈���Ă��܂����A���A
�����ł́A�r�̒����������I�ȐL�яk�݂ŕω����Ȃ��������䂵�Ղ���ł���B
>>311 369�����Ȃ����J�L�R������ł����H
>>374 �|�n�ł����B��������MIT�ł��ˁB�����炭���̌�ŁA�G�̂���N���Q�ɂ�����ł��傤�B
�|�n�Ƃ����̂́A�l�Ԃ�����Đ��䂵�Ă܂�����A������Ƃ₻���Ƃł̓��{�b�g�Ƀ}�l������g�R��
�܂ōs���Ȃ��ł��ˁB�����|�n���ƌ����ڂɂ͏d�S�̈ʒu�Ƃ��r�̉^���Ƃ����߂��悤�Ɏv���܂����A
�l�Ԃ̑�������Ă��镔�����G�̖�ڂ�����̂ŁA�G�����̃s�����s�����Ƃ͈���Ă��܂����A���A
�����ł́A�r�̒����������I�ȐL�яk�݂ŕω����Ȃ��������䂵�Ղ���ł���B
>>311 369�����Ȃ����J�L�R������ł����H
���̂悤�ɂ��l���ɂȂ�͎̂c�O�ł��B�퓬���[�h�ł����H
>>376
375�͉��ł͂Ȃ���B
�l�̂̉^���͂���Ȏ��ł͕\���Ȃ��A�Ƃ����̂Ȃ�A�ǂ��������Ȃ�\����̂������ė~�����B
�܂����^����\���鎮�ȂǑ��݂��Ȃ��A�ƌ����Ă���킯�ł͂���܂��H
�S��������ȉ���ł����Ȃ��A�ƌ����Ă��邪�A���肵���̂͊�����O�͂��鑽�����N�n�Ƃ������Ƃ������B
���R�l�̂����{�b�g������ɓ��Ă͂܂�B
���Ă�����̂Ƃ��Ă��Ȃ����̂Ƃł́A���̕����ł͍��͂Ȃ��B���ꂪ�R���Ǝv���Ȃ�Ύ��������Ă݂�����B
�P�ɕ��Ă���Ƃ��낪
m_i (d^2p_i/dt^2 + g) = f_i - ��_{j=1,Ni} f_i+1,j
�ƂȂ邾�����B������S�̂Řa���Ƃ�Ό��Ǒ��E�����B
���A
m_N ( d^2p_2/dt^2 + g ) = - f_N
����͊ԈႢ��������B
m_N ( d^2p_N/dt^2 + g ) = f_N
�����ˁA���߂�B
���[���ǂ��Ȃ��Ă��邩�Ƃ������́A���̘b��ɂƂ��Ă���Ȃɏd�v���H������̂����Ă��邱�Ƃ́A�ǂ�Ȍ`��E
�\�������Ă��悤�ƁA�ǂ�Ȋߗ͂����悤�ƁA�S�̂̉^���͊O�͂Əd�S�Ƃ̊W�ɏW���A�Ƃ������Ƃ��B
�������́A�ߗ͂̕��z�̎d���͏d�v�łȂ��A�ƌ����Ă���킯�ł͌����ĂȂ��B�����ē����ꂽ�^��������
�́A���Z�ōŏ��ɏK��
m a = F
����Ɩ{���I�ɑS���������̂��B���i�^����\���Ă��邱�Ƃ͎�������H
���ꂩ��A�u��}�v�Ƃ����̂́A�m�����E���p�Ȃǂ̐��ʓI�W���ێ����Ȃ���}�`��`�����Ƃ��B>>95���O�ɕ`���Ă���
�l�����ƊO�͂͏d�S�߂���ʂ邪�ł͂����Ȃ�Ȃ��A�Ƃ��������̊G�A����́A�`����Ă�����̐��ʓI������
�ǂ��ɂ��Ȃ��̂ŁA��}�Ƃ͌ĂȂ��B
�J��Ԃ����A���_�͒�ʓI�ɗ��ށB����I�Ȕᔻ�i�u����͍��ۓI�A�d�����[�v�݂����Ȃ�)�͂�߂Ă���B
375�͉��ł͂Ȃ���B
�l�̂̉^���͂���Ȏ��ł͕\���Ȃ��A�Ƃ����̂Ȃ�A�ǂ��������Ȃ�\����̂������ė~�����B
�܂����^����\���鎮�ȂǑ��݂��Ȃ��A�ƌ����Ă���킯�ł͂���܂��H
�S��������ȉ���ł����Ȃ��A�ƌ����Ă��邪�A���肵���̂͊�����O�͂��鑽�����N�n�Ƃ������Ƃ������B
���R�l�̂����{�b�g������ɓ��Ă͂܂�B
���Ă�����̂Ƃ��Ă��Ȃ����̂Ƃł́A���̕����ł͍��͂Ȃ��B���ꂪ�R���Ǝv���Ȃ�Ύ��������Ă݂�����B
�P�ɕ��Ă���Ƃ��낪
m_i (d^2p_i/dt^2 + g) = f_i - ��_{j=1,Ni} f_i+1,j
�ƂȂ邾�����B������S�̂Řa���Ƃ�Ό��Ǒ��E�����B
���A
m_N ( d^2p_2/dt^2 + g ) = - f_N
����͊ԈႢ��������B
m_N ( d^2p_N/dt^2 + g ) = f_N
�����ˁA���߂�B
���[���ǂ��Ȃ��Ă��邩�Ƃ������́A���̘b��ɂƂ��Ă���Ȃɏd�v���H������̂����Ă��邱�Ƃ́A�ǂ�Ȍ`��E
�\�������Ă��悤�ƁA�ǂ�Ȋߗ͂����悤�ƁA�S�̂̉^���͊O�͂Əd�S�Ƃ̊W�ɏW���A�Ƃ������Ƃ��B
�������́A�ߗ͂̕��z�̎d���͏d�v�łȂ��A�ƌ����Ă���킯�ł͌����ĂȂ��B�����ē����ꂽ�^��������
�́A���Z�ōŏ��ɏK��
m a = F
����Ɩ{���I�ɑS���������̂��B���i�^����\���Ă��邱�Ƃ͎�������H
���ꂩ��A�u��}�v�Ƃ����̂́A�m�����E���p�Ȃǂ̐��ʓI�W���ێ����Ȃ���}�`��`�����Ƃ��B>>95���O�ɕ`���Ă���
�l�����ƊO�͂͏d�S�߂���ʂ邪�ł͂����Ȃ�Ȃ��A�Ƃ��������̊G�A����́A�`����Ă�����̐��ʓI������
�ǂ��ɂ��Ȃ��̂ŁA��}�Ƃ͌ĂȂ��B
�J��Ԃ����A���_�͒�ʓI�ɗ��ށB����I�Ȕᔻ�i�u����͍��ۓI�A�d�����[�v�݂����Ȃ�)�͂�߂Ă���B
379 �F���J�����������F05/01/30 11:59:05 ID:8yAzBxUp
�v���̕�������������悤�ł��ˁB
���͍��Z���ł������{�b�g�̌����Ɍg��肽���̂ł����A�ǂ���������̂ł��傤���H
��Ђɓ���������Ƃ����Ċ�]�̕����ɂ���Ƃ͌���܂����ˁH
�A�h�o�C�X���������I
��w�͓��H��𗈔N����\��ł��B
���͍��Z���ł������{�b�g�̌����Ɍg��肽���̂ł����A�ǂ���������̂ł��傤���H
��Ђɓ���������Ƃ����Ċ�]�̕����ɂ���Ƃ͌���܂����ˁH
�A�h�o�C�X���������I
��w�͓��H��𗈔N����\��ł��B
380 �F�X�T�F05/01/30 12:57:01 ID:O/5R4JWn
>>377 369��ǂ��ɂ͓��Ƀo���_�i�A���ɂ̓T�o�C�o���i�C�t�A�ŁA�l60�}�V���K����
�\�������ǂˁB372��ǂ�ŃY�f�b�ƃR�P������ŁA�����q�g�Ȃ낤���H�@���ċ^�₪
�N������ł���B�����퓬���[�h�Ȃ�u���Ȃ����J�L�R������ł����H�v�Ƃ��������ł�
�����܂����B
�����375��366���Ǝv������Ŏ��炵����������P�ŁA366����A����܂���B
��ώ��炵�܂����B
�ŁA�R�R������ꊷ���āc���A�u��ʓI�ɔ��_����v�Ƃ����͎̂��ɂ͂ł��܂���B�l�̂̉^����
�\�����́A�l�������Ƃ�����܂���B����ɂ͑S���K�v�����ł�����ˁB
�����ƍl���Ă������Ƃ́A�����ɋN�����Ă��邱�Ƃ���������Ȃ��A�ǂ��܂Ő����ł��邩�H�ł��B
�u100���X�b�W��̑I��Ɠ��{�̑I��ł͉����Ⴄ���H�v�Ƃ����Ƃ��납��A�u�w�ܐ�ŏR��x���A
������x���ʂ�����͉̂��̂��H�v�u���̃T�C�Y���傫�������L���ƌ�����͉̂��̂��H�v���X�A
�ʂẮu���l�̐������A���̉����������͂��Ȃ̂ɁA��������イ�����������͉̂��̂��H�v��
�����悤�ȁA�܂��A�ڂɕt�����̂ɕЂ��[������������邱�ƂŎ����������Ă�����ł���B
���́u���ɐ��i�͂�����e�R�̃��J�j�Y���v���A�����M������ł���킯�ł͂Ȃ��ł���B
���̋t�ŁA�^�������Ă��Ă���̂ŁA�����ɂ��鎖�ۂŌ����Ăق���т������悤�Ƃ�������
���Ă����ł��B�e�R�̂悤�ȁA�u����܂ł́w�펯�x�ɂȂ����́v�́A����܂ł̏펯��
�^���������ŕ\�����Ƃ͂ł��Ȃ����낤�Ǝv���܂��B
�\�������ǂˁB372��ǂ�ŃY�f�b�ƃR�P������ŁA�����q�g�Ȃ낤���H�@���ċ^�₪
�N������ł���B�����퓬���[�h�Ȃ�u���Ȃ����J�L�R������ł����H�v�Ƃ��������ł�
�����܂����B
�����375��366���Ǝv������Ŏ��炵����������P�ŁA366����A����܂���B
��ώ��炵�܂����B
�ŁA�R�R������ꊷ���āc���A�u��ʓI�ɔ��_����v�Ƃ����͎̂��ɂ͂ł��܂���B�l�̂̉^����
�\�����́A�l�������Ƃ�����܂���B����ɂ͑S���K�v�����ł�����ˁB
�����ƍl���Ă������Ƃ́A�����ɋN�����Ă��邱�Ƃ���������Ȃ��A�ǂ��܂Ő����ł��邩�H�ł��B
�u100���X�b�W��̑I��Ɠ��{�̑I��ł͉����Ⴄ���H�v�Ƃ����Ƃ��납��A�u�w�ܐ�ŏR��x���A
������x���ʂ�����͉̂��̂��H�v�u���̃T�C�Y���傫�������L���ƌ�����͉̂��̂��H�v���X�A
�ʂẮu���l�̐������A���̉����������͂��Ȃ̂ɁA��������イ�����������͉̂��̂��H�v��
�����悤�ȁA�܂��A�ڂɕt�����̂ɕЂ��[������������邱�ƂŎ����������Ă�����ł���B
���́u���ɐ��i�͂�����e�R�̃��J�j�Y���v���A�����M������ł���킯�ł͂Ȃ��ł���B
���̋t�ŁA�^�������Ă��Ă���̂ŁA�����ɂ��鎖�ۂŌ����Ăق���т������悤�Ƃ�������
���Ă����ł��B�e�R�̂悤�ȁA�u����܂ł́w�펯�x�ɂȂ����́v�́A����܂ł̏펯��
�^���������ŕ\�����Ƃ͂ł��Ȃ����낤�Ǝv���܂��B
381 �F�X�T�F05/01/30 13:06:53 ID:O/5R4JWn
��ʓI�ɔ��_�ł��Ȃ��̂�366����Ɏ��₷��̂��ǂ����Ƃ͎v���܂����A
>>������O�͂��鑽�����N�n�����肵���B���R�l�̂����{�b�g������ɓ��Ă͂܂�B���w���R�x���Ă͂܂�A
�Ƃ��Ė{���ɗǂ��̂��H�@���͂ŗ͂����Ă���̂�P�Ɋ�����O�͂���Ƃ������Ƃŗǂ��̂��H
�l�̂ƌ��݂̓��{�b�g�Ƃ́A�쓮�������S���Ⴄ�͉̂^���������ŕ\���Ă���̂��H
>>���Ă�����̂Ƃ��Ă��Ȃ����̂Ƃł́A���̕����ł͍��͂Ȃ��B���w���̕����x�őÓ��ł��A���ꂪ�����̂��̂�
���m�ɕ\���Ă���ƌ�����̂��H
�����N�̗��[�̈���𑫂Ƃ��āA��������͓��Ƃ���̂��A��������̑��Ƃ���̂��H�ňႢ�͖����̂��H
�߂̎��R�x�ɂ͂��ꂼ��ɐ���������̂͂ǂ��\����Ă���H�@��������܂��đS�̂Řa��������ꍇ�A�{����
���E�����ƌ����邩�H
�@
���̕`�����}�̖��ɐ��ʓI�����������̂́u�Ȃ�ł����ɓ˂����݂������̂��ȁH�v�ƁA�s�v�c�Ɏv���Ă���ŁA
�������ł��ȁB����̐����ł͂����ƃ��`���N�`���Ȃ��s����`�́u�G�v���܂���ʂ��Ă܂�����ˁB
��}�Ƃ͌ĂȂ����Ƃɂ��܂��B�u�C���[�W�}�v���炢�ł������H
>>������O�͂��鑽�����N�n�����肵���B���R�l�̂����{�b�g������ɓ��Ă͂܂�B���w���R�x���Ă͂܂�A
�Ƃ��Ė{���ɗǂ��̂��H�@���͂ŗ͂����Ă���̂�P�Ɋ�����O�͂���Ƃ������Ƃŗǂ��̂��H
�l�̂ƌ��݂̓��{�b�g�Ƃ́A�쓮�������S���Ⴄ�͉̂^���������ŕ\���Ă���̂��H
>>���Ă�����̂Ƃ��Ă��Ȃ����̂Ƃł́A���̕����ł͍��͂Ȃ��B���w���̕����x�őÓ��ł��A���ꂪ�����̂��̂�
���m�ɕ\���Ă���ƌ�����̂��H
�����N�̗��[�̈���𑫂Ƃ��āA��������͓��Ƃ���̂��A��������̑��Ƃ���̂��H�ňႢ�͖����̂��H
�߂̎��R�x�ɂ͂��ꂼ��ɐ���������̂͂ǂ��\����Ă���H�@��������܂��đS�̂Řa��������ꍇ�A�{����
���E�����ƌ����邩�H
�@
���̕`�����}�̖��ɐ��ʓI�����������̂́u�Ȃ�ł����ɓ˂����݂������̂��ȁH�v�ƁA�s�v�c�Ɏv���Ă���ŁA
�������ł��ȁB����̐����ł͂����ƃ��`���N�`���Ȃ��s����`�́u�G�v���܂���ʂ��Ă܂�����ˁB
��}�Ƃ͌ĂȂ����Ƃɂ��܂��B�u�C���[�W�}�v���炢�ł������H
>>380
>�ŁA�R�R������ꊷ���āc���A�u��ʓI�ɔ��_����v�Ƃ����͎̂��ɂ͂ł��܂���B�l�̂̉^����
>�\�����́A�l�������Ƃ�����܂���B����ɂ͑S���K�v�����ł�����ˁB
�X�|�[�c�Ȋw�́A����܂Ōo�����ł����Ȃ��������̂��A��ʓI��͂����ė��t����
�Ƃ�����ԈႢ�𐳂����肷�邱�ƂŔ���I�ɔ��W�����B����ɂ͎��͑S���K�v�Ȃ��Ȃǂ�
�����̂́A�Ȋw���܂��Ȃ��ɑލs������悤�Ȃ��̂��B
>�u�w�ܐ�ŏR��x���A������x���ʂ�����͉̂��̂��H�v
>�u���̃T�C�Y���傫�������L���ƌ�����͉̂��̂��H�v
�������Ԃ��Ƃ�邩��ł���B�����n�ʂ𗣂ꂽ�r�[�ɉ������~�܂�킯������B
>�e�R�̂悤�ȁA�u����܂ł́w�펯�x�ɂȂ����́v�́A����܂ł̏펯�̉^���������ŕ\�����Ƃ�
>�ł��Ȃ����낤�Ǝv���܂��B
�^���������Ƃ������̂�����������Ă���悤�����ǁA���Ȃ��Ƃ��j���[�g���͊w�͈̔͂Ō�
���Ȃ�A�K�v�ȉ���́u���̂̉����x�͉�����ꂽ�͂ɔ�Ⴗ��(���̔��萔������)�v
�Ƃ����������B�ǂ�ȃ��g���b�N���g���Ă����\�����ǁA�^����������(��̉���ɏ]������)
��ӂɌ��܂�B�l�̂̉^���̓j���[�g���͊w�ł͐����ł��Ȃ��Ƃł��������肩�B����́A
���{�b�g�H�w�����łȂ��o�C�I���J�j�N�X�Ɍg��鐢�E���̑S�Ă̌����҂�G�ɉƂ���
���Ƃ��B�M���ɂ��̊o�傪����̂��B
������Ə��������������Ȃ��Ă��܂����̂ŃN�[���_�E���B
>�ŁA�R�R������ꊷ���āc���A�u��ʓI�ɔ��_����v�Ƃ����͎̂��ɂ͂ł��܂���B�l�̂̉^����
>�\�����́A�l�������Ƃ�����܂���B����ɂ͑S���K�v�����ł�����ˁB
�X�|�[�c�Ȋw�́A����܂Ōo�����ł����Ȃ��������̂��A��ʓI��͂����ė��t����
�Ƃ�����ԈႢ�𐳂����肷�邱�ƂŔ���I�ɔ��W�����B����ɂ͎��͑S���K�v�Ȃ��Ȃǂ�
�����̂́A�Ȋw���܂��Ȃ��ɑލs������悤�Ȃ��̂��B
>�u�w�ܐ�ŏR��x���A������x���ʂ�����͉̂��̂��H�v
>�u���̃T�C�Y���傫�������L���ƌ�����͉̂��̂��H�v
�������Ԃ��Ƃ�邩��ł���B�����n�ʂ𗣂ꂽ�r�[�ɉ������~�܂�킯������B
>�e�R�̂悤�ȁA�u����܂ł́w�펯�x�ɂȂ����́v�́A����܂ł̏펯�̉^���������ŕ\�����Ƃ�
>�ł��Ȃ����낤�Ǝv���܂��B
�^���������Ƃ������̂�����������Ă���悤�����ǁA���Ȃ��Ƃ��j���[�g���͊w�͈̔͂Ō�
���Ȃ�A�K�v�ȉ���́u���̂̉����x�͉�����ꂽ�͂ɔ�Ⴗ��(���̔��萔������)�v
�Ƃ����������B�ǂ�ȃ��g���b�N���g���Ă����\�����ǁA�^����������(��̉���ɏ]������)
��ӂɌ��܂�B�l�̂̉^���̓j���[�g���͊w�ł͐����ł��Ȃ��Ƃł��������肩�B����́A
���{�b�g�H�w�����łȂ��o�C�I���J�j�N�X�Ɍg��鐢�E���̑S�Ă̌����҂�G�ɉƂ���
���Ƃ��B�M���ɂ��̊o�傪����̂��B
������Ə��������������Ȃ��Ă��܂����̂ŃN�[���_�E���B
>>������O�͂��鑽�����N�n�����肵���B���R�l�̂����{�b�g������ɓ��Ă͂܂�B
>���w���R�x���Ă͂܂�A�Ƃ��Ė{���ɗǂ��̂��H�@���͂ŗ͂����Ă���̂�P�Ɋ�����
>�O�͂���Ƃ������Ƃŗǂ��̂��H
�L���X�^�[�̂����֎q�ɍ�����(���͏����痣����)�A���O�Ɍ������ē˂��o���Ă����B
���R�A���O�ɏo�����߂Ɏ��͂ŗ͂����邱�ƂɂȂ�킯�����ǁA���̌��ʈ֎q�͌���
�����o���������H
���ɁA����������ɓ˂��o���̂ł͂Ȃ��A�ǂ����K���ȕǂ������悤�ɓ˂��o������H���x
�͈֎q�͌��ɓ����o��������H366�œ����������Ӗ����Ă���̂͂����������ƁB
�F����Ԃł�����葫�����������Ă��d�S�̈ʒu�͕ς��Ȃ��킯(�s�v�c�Ȃ��ƂɁA
�p���͕ς��B��z���m�~�b�N�S���Ƃ������)�B
>�l�̂ƌ��݂̓��{�b�g�Ƃ́A�쓮�������S���Ⴄ�͉̂^���������ŕ\���Ă���̂��H
�쓮���������ł��낤�ƁA���ǃA�N�`���G�[�^�Ƃ������̂�f_i����������̂ɂق��Ȃ�
�Ȃ��Bf_i���ǂ̂悤�Ȍ����Ŕ������ꂽ���Ƃ������́A���̕����ł͖��ɂ��Ă��Ȃ��B
�쓮�����̍��قׂ�����A�����ƃ~�N���ȃ��x���ōl���Ȃ�������Ȃ��킯�ŁA
��������ƍ��x�͑S�̂ɋN���邱�Ƃ������Ȃ��Ȃ�(�����疳�ʂ��A�ƌ����Ă���킯�ł�
�������Ȃ�)�B
>>���Ă�����̂Ƃ��Ă��Ȃ����̂Ƃł́A���̕����ł͍��͂Ȃ��B
>���w���̕����x�őÓ��ł��A���ꂪ�����̂��̂𐳊m�ɕ\���Ă���ƌ�����̂��H
>�����N�̗��[�̈���𑫂Ƃ��āA��������͓��Ƃ���̂��A��������̑��Ƃ���̂��H�ňႢ�͖����̂��H
>�߂̎��R�x�ɂ͂��ꂼ��ɐ���������̂͂ǂ��\����Ă���H�@��������܂��đS�̂�
>�a��������ꍇ�A�{���ɑ��E�����ƌ����邩�H
�ł́A�����ł���Ă݂Ȃ����Bi=0�`N�Ə����̂łȂ��ɁA���ۂɐl�^�����������N�n��
���f���𗧂ĂāA�X�̃����N�̉^���������𗧂ĂĂ݂�B�������N�ƁA�V�r���惊���N�Ƃ�
���̌`�͕ς�������H
�u�߂̎��R�x�̐����v�������Ӗ����邩������Ȃ����ǁA���͈̘͂b�H�����N���Ƃ�
���ʂ̈Ⴂ�̘b�H�����͂������d�v�����ǁA���͂���ȍ����Șb�����Ă��邩�H
>��}�Ƃ͌ĂȂ����Ƃɂ��܂��B�u�C���[�W�}�v���炢�ł������H
����܂ł���u����Ȏv�����݁v��ᔻ���Ă����M�����A�u�C���[�W�}�v�ʼn������������̂��B
�܂����������������Ȃ��Ă��܂����̂ŃN�[���_�E���B
>���w���R�x���Ă͂܂�A�Ƃ��Ė{���ɗǂ��̂��H�@���͂ŗ͂����Ă���̂�P�Ɋ�����
>�O�͂���Ƃ������Ƃŗǂ��̂��H
�L���X�^�[�̂����֎q�ɍ�����(���͏����痣����)�A���O�Ɍ������ē˂��o���Ă����B
���R�A���O�ɏo�����߂Ɏ��͂ŗ͂����邱�ƂɂȂ�킯�����ǁA���̌��ʈ֎q�͌���
�����o���������H
���ɁA����������ɓ˂��o���̂ł͂Ȃ��A�ǂ����K���ȕǂ������悤�ɓ˂��o������H���x
�͈֎q�͌��ɓ����o��������H366�œ����������Ӗ����Ă���̂͂����������ƁB
�F����Ԃł�����葫�����������Ă��d�S�̈ʒu�͕ς��Ȃ��킯(�s�v�c�Ȃ��ƂɁA
�p���͕ς��B��z���m�~�b�N�S���Ƃ������)�B
>�l�̂ƌ��݂̓��{�b�g�Ƃ́A�쓮�������S���Ⴄ�͉̂^���������ŕ\���Ă���̂��H
�쓮���������ł��낤�ƁA���ǃA�N�`���G�[�^�Ƃ������̂�f_i����������̂ɂق��Ȃ�
�Ȃ��Bf_i���ǂ̂悤�Ȍ����Ŕ������ꂽ���Ƃ������́A���̕����ł͖��ɂ��Ă��Ȃ��B
�쓮�����̍��قׂ�����A�����ƃ~�N���ȃ��x���ōl���Ȃ�������Ȃ��킯�ŁA
��������ƍ��x�͑S�̂ɋN���邱�Ƃ������Ȃ��Ȃ�(�����疳�ʂ��A�ƌ����Ă���킯�ł�
�������Ȃ�)�B
>>���Ă�����̂Ƃ��Ă��Ȃ����̂Ƃł́A���̕����ł͍��͂Ȃ��B
>���w���̕����x�őÓ��ł��A���ꂪ�����̂��̂𐳊m�ɕ\���Ă���ƌ�����̂��H
>�����N�̗��[�̈���𑫂Ƃ��āA��������͓��Ƃ���̂��A��������̑��Ƃ���̂��H�ňႢ�͖����̂��H
>�߂̎��R�x�ɂ͂��ꂼ��ɐ���������̂͂ǂ��\����Ă���H�@��������܂��đS�̂�
>�a��������ꍇ�A�{���ɑ��E�����ƌ����邩�H
�ł́A�����ł���Ă݂Ȃ����Bi=0�`N�Ə����̂łȂ��ɁA���ۂɐl�^�����������N�n��
���f���𗧂ĂāA�X�̃����N�̉^���������𗧂ĂĂ݂�B�������N�ƁA�V�r���惊���N�Ƃ�
���̌`�͕ς�������H
�u�߂̎��R�x�̐����v�������Ӗ����邩������Ȃ����ǁA���͈̘͂b�H�����N���Ƃ�
���ʂ̈Ⴂ�̘b�H�����͂������d�v�����ǁA���͂���ȍ����Șb�����Ă��邩�H
>��}�Ƃ͌ĂȂ����Ƃɂ��܂��B�u�C���[�W�}�v���炢�ł������H
����܂ł���u����Ȏv�����݁v��ᔻ���Ă����M�����A�u�C���[�W�}�v�ʼn������������̂��B
�܂����������������Ȃ��Ă��܂����̂ŃN�[���_�E���B
�ȂA�������g�̏������݂��������Ȃ��Ă����B�������A���B
���z�̏��ł́A95����ے肵�Ă���킯�ł͂Ȃ���B
�S�̂̑��a���Ƃ�ƊO�͂����c��Ȃ����A�ł͂��̊O�͂͂ǂ�����Ĕ������Ă��邩
�Ƃ����ƁA�X�̃A�N�`���G�[�^�ɋA������킯������ȁB�ŁA95���̌����������Ƃ���
�����̂́A�����Ɍ����悭�O�͂������邽�߂ɁA�A�N�`���G�[�^�̗͔z�������߂�
�����Ă��Ƃ��Ǝv���B�u��ڂ̋ؓ����A�A�A�v�Ƃ������̂͂��������b���낤�B
�C�ɂȂ�̂́A���̐��������܂�Ɂu�����̌��t�v�����Ō���Ă���̂ƁA���炩��
�����@���ɔ����邱�Ƃ������Ă���̂ƁA�Ƃ��ǂ�����I�ȃo�b�V���O���������Ă�����
����̂ƂŁA�S�����������Ɋ������Ȃ��Ƃ������Ƃ��B������Ȃ�Ƃ����āA�ƌ��������B
��ԊȒP�Ȃ̂́A����ώ��ŕ\�����Ƃ��Ǝv�����ǂˁB���̕ӂ�̒m�����Ȃ��A��
�J�����邭�炢�Ȃ�A�����ƕ����邱�Ƃ������߂����B�ƌ������̓��`��B
���z�̏��ł́A95����ے肵�Ă���킯�ł͂Ȃ���B
�S�̂̑��a���Ƃ�ƊO�͂����c��Ȃ����A�ł͂��̊O�͂͂ǂ�����Ĕ������Ă��邩
�Ƃ����ƁA�X�̃A�N�`���G�[�^�ɋA������킯������ȁB�ŁA95���̌����������Ƃ���
�����̂́A�����Ɍ����悭�O�͂������邽�߂ɁA�A�N�`���G�[�^�̗͔z�������߂�
�����Ă��Ƃ��Ǝv���B�u��ڂ̋ؓ����A�A�A�v�Ƃ������̂͂��������b���낤�B
�C�ɂȂ�̂́A���̐��������܂�Ɂu�����̌��t�v�����Ō���Ă���̂ƁA���炩��
�����@���ɔ����邱�Ƃ������Ă���̂ƁA�Ƃ��ǂ�����I�ȃo�b�V���O���������Ă�����
����̂ƂŁA�S�����������Ɋ������Ȃ��Ƃ������Ƃ��B������Ȃ�Ƃ����āA�ƌ��������B
��ԊȒP�Ȃ̂́A����ώ��ŕ\�����Ƃ��Ǝv�����ǂˁB���̕ӂ�̒m�����Ȃ��A��
�J�����邭�炢�Ȃ�A�����ƕ����邱�Ƃ������߂����B�ƌ������̓��`��B
385 �F�X�T�F05/01/30 17:57:58 ID:O/5R4JWn
���`��Ȃ�366�B���������̌��t�Ō���Ă�����Ă̂́A�����ł͂Ȃ��Ȃ��C��������ˁB
���ɂȂ��B
���炩�ɕ����@���ɔ����邱�Ƃ������Ă�����Ă̂͒P�ɂ܂��u�N���m��Ȃ����E�v�������
������������B�������̂Q�����˂�[�������Ă邱�Ƃ�����M�������Ȃ��̂͂��������Ȃ����ǂˁB
�l�̂̉^�����j���[�g���͊w�ł͐����ł��Ȃ��ƌ�������̓T���T�������B�A�N�}�Ńj���[�g��
�͊w�Ő������悤�Ƃ��Ă��B�������A�o�C�I���J�j�N�X�Ɍg��鐢�E���̌����҂̒���
�u����v�Ɋւ��҂��ׂĂ�G�ɉ͖̂]�ނƂ��낾��B�Ƃ������A�������łɂ���̓{�`�{�`
����Ă��Ă�B�L���Ȋw�҃Z���Z�łg�o�������Ă���l�����Ƌc�_���悤�Ƃ��Ă�������ǁA
���̃Z���Z�̖������Q�R�˂��Ă��ƁA�u���͋c�_�͂��Ȃ��I�v�ƁA�f����g�o�܂ŕ�
�����肷�邩��ˁB
366�œ����������Ӗ����Ă���̂��u�L���X�^�[�̂����֎q�ɍ����ēK���ȕǂ������悤��
�˂��o������֎q�͌��ɓ����o���v������A�Q�����s�Ƃ͑S�R�Ⴄ��Ȃ��́H
>>�u�w�ܐ�ŏR��x���A������x���ʂ�����͉̂��̂��H�v
>>�u���̃T�C�Y���傫�������L���ƌ�����͉̂��̂��H�v
>�������Ԃ��Ƃ�邩��ł���B�����n�ʂ𗣂ꂽ�r�[�ɉ������~�܂�킯������B
���������̂ɓ�������A�J����B���̓��ӕ��삾����A�v�����������Ȃ�����Ȃ�ƂɂȂ�B
�w������x�x���ď����Ă��邾��B�ܐ�ŏR��A�ŁA�L�^���オ�F�߂���̂͏����w�����炢�܂łŁA
���Z�����炢����͂ܐ�ŏR���Ă���ƐL�тȂ��Ȃ��B�u�������Ԃ������Ƃ��v�Ƃ����悤��
���ՓI�ȃ����b�g�������Ȃ�A�I�g�i�ɂȂ��Ă������Ƃ���Ă����������ǁA�u�ܐ�ŏR��v
�܂葫��̗͂ŏR���Ƃ����ɂ͑�������͎͂シ���邵�A�������̂��j�u������A�����ɂ�
���̖��ɂ������Ȃ���B����u���̃T�C�Y���傫�������L���v�Ƃ����͕̂��ՓI�ȃ����b�g�Ȃ���ǁA
�����傫�������A�n�ʂ��R�邽�߂ɗ͂��o���u�e�R�v�Ƃ��Ă͕s��������A�����̂��߂ł͂Ȃ��B
���Ⴀ���̂Ȃ̂��H�����͗���ł͂Ȃ��̂ŏ����Ȃ�����ǁA����ȊȒP�����Ȃ��Ƃł����́u�X�|�[�c
�Ȋw�v�ł͐����ł��Ȃ���B������A�X�|�[�c�Ȋw�́A�u����v�ȊO�ł̂݁A���B���Ă����B
�ł���{�ł���͂��́u����̉Ȋw�v�����͖����Ɉł̒��Ȃ�B
�u�߂̎��R�x�̐����v�Ƃ����͉̂��͈̘͂b����B�G��Ђ��Ȃǂ͋Ȃ�������͌����Ă��邯�ǁA
�r�Ȃ甼���ȏ�ɓ����͈͂�����B���w���́A���������������A�����Ă���Œ��ɓ���������͂��Ȃ���ȁB
�e�p�[�c���Ƃ̎��ʂ́A����͓��R���߂��������Ă����Ȃ��́H�@�ŁA�������l�����Ȃ�
�w�ዉ�Șb�x�����Ă���Ƃ������ƂȂ�A�^���������̘b�����̃��x���Ƃ������ƂŁB
����I�ȃo�b�V���O���������Ă���Ƃ����̂́A�Ԃ����Ⴏ�Č����ƁA���U�Ɠ���Ă���ł���B
����ȕ����Q�����炵�����ȁA���Ă��ƂŁB
���ɂȂ��B
���炩�ɕ����@���ɔ����邱�Ƃ������Ă�����Ă̂͒P�ɂ܂��u�N���m��Ȃ����E�v�������
������������B�������̂Q�����˂�[�������Ă邱�Ƃ�����M�������Ȃ��̂͂��������Ȃ����ǂˁB
�l�̂̉^�����j���[�g���͊w�ł͐����ł��Ȃ��ƌ�������̓T���T�������B�A�N�}�Ńj���[�g��
�͊w�Ő������悤�Ƃ��Ă��B�������A�o�C�I���J�j�N�X�Ɍg��鐢�E���̌����҂̒���
�u����v�Ɋւ��҂��ׂĂ�G�ɉ͖̂]�ނƂ��낾��B�Ƃ������A�������łɂ���̓{�`�{�`
����Ă��Ă�B�L���Ȋw�҃Z���Z�łg�o�������Ă���l�����Ƌc�_���悤�Ƃ��Ă�������ǁA
���̃Z���Z�̖������Q�R�˂��Ă��ƁA�u���͋c�_�͂��Ȃ��I�v�ƁA�f����g�o�܂ŕ�
�����肷�邩��ˁB
366�œ����������Ӗ����Ă���̂��u�L���X�^�[�̂����֎q�ɍ����ēK���ȕǂ������悤��
�˂��o������֎q�͌��ɓ����o���v������A�Q�����s�Ƃ͑S�R�Ⴄ��Ȃ��́H
>>�u�w�ܐ�ŏR��x���A������x���ʂ�����͉̂��̂��H�v
>>�u���̃T�C�Y���傫�������L���ƌ�����͉̂��̂��H�v
>�������Ԃ��Ƃ�邩��ł���B�����n�ʂ𗣂ꂽ�r�[�ɉ������~�܂�킯������B
���������̂ɓ�������A�J����B���̓��ӕ��삾����A�v�����������Ȃ�����Ȃ�ƂɂȂ�B
�w������x�x���ď����Ă��邾��B�ܐ�ŏR��A�ŁA�L�^���オ�F�߂���̂͏����w�����炢�܂łŁA
���Z�����炢����͂ܐ�ŏR���Ă���ƐL�тȂ��Ȃ��B�u�������Ԃ������Ƃ��v�Ƃ����悤��
���ՓI�ȃ����b�g�������Ȃ�A�I�g�i�ɂȂ��Ă������Ƃ���Ă����������ǁA�u�ܐ�ŏR��v
�܂葫��̗͂ŏR���Ƃ����ɂ͑�������͎͂シ���邵�A�������̂��j�u������A�����ɂ�
���̖��ɂ������Ȃ���B����u���̃T�C�Y���傫�������L���v�Ƃ����͕̂��ՓI�ȃ����b�g�Ȃ���ǁA
�����傫�������A�n�ʂ��R�邽�߂ɗ͂��o���u�e�R�v�Ƃ��Ă͕s��������A�����̂��߂ł͂Ȃ��B
���Ⴀ���̂Ȃ̂��H�����͗���ł͂Ȃ��̂ŏ����Ȃ�����ǁA����ȊȒP�����Ȃ��Ƃł����́u�X�|�[�c
�Ȋw�v�ł͐����ł��Ȃ���B������A�X�|�[�c�Ȋw�́A�u����v�ȊO�ł̂݁A���B���Ă����B
�ł���{�ł���͂��́u����̉Ȋw�v�����͖����Ɉł̒��Ȃ�B
�u�߂̎��R�x�̐����v�Ƃ����͉̂��͈̘͂b����B�G��Ђ��Ȃǂ͋Ȃ�������͌����Ă��邯�ǁA
�r�Ȃ甼���ȏ�ɓ����͈͂�����B���w���́A���������������A�����Ă���Œ��ɓ���������͂��Ȃ���ȁB
�e�p�[�c���Ƃ̎��ʂ́A����͓��R���߂��������Ă����Ȃ��́H�@�ŁA�������l�����Ȃ�
�w�ዉ�Șb�x�����Ă���Ƃ������ƂȂ�A�^���������̘b�����̃��x���Ƃ������ƂŁB
����I�ȃo�b�V���O���������Ă���Ƃ����̂́A�Ԃ����Ⴏ�Č����ƁA���U�Ɠ���Ă���ł���B
����ȕ����Q�����炵�����ȁA���Ă��ƂŁB
386 �F���J�����������F05/01/30 22:18:54 ID:4pUwci4x
>>�X�T����
���X��Â��������Ă��܂���H
���炭�������Ă܂����������̂Ƃ���A���͂������Ɠǂ܂Ȃ���
�����_�����܂܃��X���Ă邱�Ƃ������Ȃ��Ă܂���B
>366�œ����������Ӗ����Ă���̂��u�L���X�^�[�̂����֎q�ɍ����ēK���ȕǂ������悤��
>�˂��o������֎q�͌��ɓ����o���v������A�Q�����s�Ƃ͑S�R�Ⴄ��Ȃ��́H
����ɂ������������_����̂��I�O�ꂾ���ċC���t���Ȃ��H
����������ƕ��ӂ�ǂݎ�������������Ǝv����
�O�͂��ĂȂɂ����Ă͂Ȃ�������B
366����>>384�ł����Ă���e�������Ȃ���
������x�悭�ǂݕԂ��Ă݂Ă���A���̏�ł̈ӌ��������Ă݂����ł��B
�����炩�ɕ����@���ɔ����邱�Ƃ������Ă�����Ă̂͒P�ɂ܂��u�N���m��Ȃ����E�v�������
��������������B
�X�T���m��Ȃ��������Ď����L��B
���X��Â��������Ă��܂���H
���炭�������Ă܂����������̂Ƃ���A���͂������Ɠǂ܂Ȃ���
�����_�����܂܃��X���Ă邱�Ƃ������Ȃ��Ă܂���B
>366�œ����������Ӗ����Ă���̂��u�L���X�^�[�̂����֎q�ɍ����ēK���ȕǂ������悤��
>�˂��o������֎q�͌��ɓ����o���v������A�Q�����s�Ƃ͑S�R�Ⴄ��Ȃ��́H
����ɂ������������_����̂��I�O�ꂾ���ċC���t���Ȃ��H
����������ƕ��ӂ�ǂݎ�������������Ǝv����
�O�͂��ĂȂɂ����Ă͂Ȃ�������B
366����>>384�ł����Ă���e�������Ȃ���
������x�悭�ǂݕԂ��Ă݂Ă���A���̏�ł̈ӌ��������Ă݂����ł��B
�����炩�ɕ����@���ɔ����邱�Ƃ������Ă�����Ă̂͒P�ɂ܂��u�N���m��Ȃ����E�v�������
��������������B
�X�T���m��Ȃ��������Ď����L��B
387 �F���J�����������F05/01/30 23:17:34 ID:TkV3nMJ8
������������u��葬��������@�v�ɒH�蒅������������Ȃ��B
���̈�B�n���̏d�͂𗘗p����B
���̓�B���͓���荂���ʒu�ŐU��B
���̈�B�n���̏d�͂𗘗p����B
���̓�B���͓���荂���ʒu�ŐU��B
388 �F���J�����������F05/01/31 00:13:04 ID:SmgHoeg+
>>379
>��Ђɓ���������Ƃ����Ċ�]�̕����ɂ���Ƃ͌���܂����ˁH
>�A�h�o�C�X���������I
�������������̐l�Ɉ��������Ă��炤���ƁB
���̕����̐l�ƒm�荇���ɂ́A
�o���肵�Ă��錤������w��Ŕ��荞�ނ��ƁB
���荞�ނɂ͊w���Ȃ�Ɏ��т���邱�ƁB
���ȁB
>��Ђɓ���������Ƃ����Ċ�]�̕����ɂ���Ƃ͌���܂����ˁH
>�A�h�o�C�X���������I
�������������̐l�Ɉ��������Ă��炤���ƁB
���̕����̐l�ƒm�荇���ɂ́A
�o���肵�Ă��錤������w��Ŕ��荞�ނ��ƁB
���荞�ނɂ͊w���Ȃ�Ɏ��т���邱�ƁB
���ȁB
389 �F���J�����������F05/01/31 04:45:06 ID:d9jSh7on
>>95
�j���[�g���͊w�ł͐����ł��邪�^���������ł͕\���Ȃ��Ƃ�
�ǂ��������Ƃł����H�����Ă邱�Ƃ�������܂���B
����Ƃ������P�ɂ��Ȃ����^�����������Ă��Ȃ��Ƃ������Ă邾���ł����H
���ƁA366�������Ă���̂͏d�S���ړ�������B��̗͔͂��͂ł���A
������r�����Ă�����ȊO�̗�(���z�e�R)�Ȃǂ͔������Ȃ��B
�������z�e�R�̗͂��l���邱�Ƃ��ł���Ƃ�����A
����͔��͂��Ⴄ�p�x�Ō������̂��A�Ƃ������Ƃ���Ȃ��ł����H
���̂悤�Șb�����Ă�̂ʼn��͈͂Ƃ����̂͂܂��ʂ̎����̘b�ł���A
���������Ӗ��Łu�����Șb�v�Ƃ������ƂȂ̂ł͂Ȃ��ł��傤���B
���Ȃ݂ɕ����V�~�����[�V�����Ƃ����b�Ȃ���͈͂�ݒ肷�邱�Ƃ�
�ȒP�ɂł��܂���B
�j���[�g���͊w�ł͐����ł��邪�^���������ł͕\���Ȃ��Ƃ�
�ǂ��������Ƃł����H�����Ă邱�Ƃ�������܂���B
����Ƃ������P�ɂ��Ȃ����^�����������Ă��Ȃ��Ƃ������Ă邾���ł����H
���ƁA366�������Ă���̂͏d�S���ړ�������B��̗͔͂��͂ł���A
������r�����Ă�����ȊO�̗�(���z�e�R)�Ȃǂ͔������Ȃ��B
�������z�e�R�̗͂��l���邱�Ƃ��ł���Ƃ�����A
����͔��͂��Ⴄ�p�x�Ō������̂��A�Ƃ������Ƃ���Ȃ��ł����H
���̂悤�Șb�����Ă�̂ʼn��͈͂Ƃ����̂͂܂��ʂ̎����̘b�ł���A
���������Ӗ��Łu�����Șb�v�Ƃ������ƂȂ̂ł͂Ȃ��ł��傤���B
���Ȃ݂ɕ����V�~�����[�V�����Ƃ����b�Ȃ���͈͂�ݒ肷�邱�Ƃ�
�ȒP�ɂł��܂���B
390 �F�X�T�F05/01/31 20:14:59 ID:xVtEmI4Z
���`���A�j�M���J�ł��ˁB>>386 �S�R�I�O��ł͂Ȃ���B����Ȃ��̂��u�����A
�������`�v�Ƃ������Ă��玄�͂Ƃ����̂ɂȂ�B
366�A386�A389�ɂ������Ƃ�����ǁA�u���ɐ����̐��i�͂�������e�R��
���J�j�Y���v�Ƃ����̂́A�������Ȑ}�����Ɏn�܂�����Ȃ���B���ۂ�
�N���錻�ۂ̔�������n�܂�����B�u���̗͉͂����H�v�Ƃ����̂���q�l�N��
�o�����̂��w���z�e�R�x��������B
386�̌����Ă�u���������m��Ȃ����Ɓv�Ƃ����̂́A�����ɗ��Ă���l�́A
�u�Ȋw�҂炵���D��S�v�������Ă��Ȃ��A�Ƃ������Ƃ݂����ł��ˁB���A����ƁA
�u�{�C�Ń��{�b�g��l�Ԃ̂悤�ɕ��������点�悤�v�Ƃ��Ă���l�����Ȃ��A
�Ƃ����̂�����悤�ł��ˁB
�������`�v�Ƃ������Ă��玄�͂Ƃ����̂ɂȂ�B
366�A386�A389�ɂ������Ƃ�����ǁA�u���ɐ����̐��i�͂�������e�R��
���J�j�Y���v�Ƃ����̂́A�������Ȑ}�����Ɏn�܂�����Ȃ���B���ۂ�
�N���錻�ۂ̔�������n�܂�����B�u���̗͉͂����H�v�Ƃ����̂���q�l�N��
�o�����̂��w���z�e�R�x��������B
386�̌����Ă�u���������m��Ȃ����Ɓv�Ƃ����̂́A�����ɗ��Ă���l�́A
�u�Ȋw�҂炵���D��S�v�������Ă��Ȃ��A�Ƃ������Ƃ݂����ł��ˁB���A����ƁA
�u�{�C�Ń��{�b�g��l�Ԃ̂悤�ɕ��������点�悤�v�Ƃ��Ă���l�����Ȃ��A
�Ƃ����̂�����悤�ł��ˁB
391 �F���J�����������F05/01/31 20:48:11 ID:/H3niOan
���������A95�͕��u���邱�Ƃɂ��Ȃ����H
392 �F���J�����������F05/02/01 02:27:22 ID:ge6K6YWz
���N���錻�ۂ̔�������n�܂�����B�u���̗͉͂����H�v�Ƃ����̂���q�l�N��
���o�����̂��w���z�e�R�x��������
���₻��͔����Ă���āA�z���g�ɗ���͂Ȃ���
��386�̌����Ă�u���������m��Ȃ����Ɓv�Ƃ����̂́A
���w����Ȃ��H
���o�����̂��w���z�e�R�x��������
���₻��͔����Ă���āA�z���g�ɗ���͂Ȃ���
��386�̌����Ă�u���������m��Ȃ����Ɓv�Ƃ����̂́A
���w����Ȃ��H
393 �F���J�����������F05/02/01 02:31:20 ID:4yRJ3WGI
���̃X���ɂ���ǐS�I�Ȑl�X
�u>>95 ���̌����Ă邱�Ƃ͗͊w�I�ɂ��܂�����Ȃ���B���ꂱ�ꂱ���������Ƃ���Ȃ��́H�v
95
�u���邹�[�ڂ��B����Ȑ����o����Ă����͗����ł���B���������ł���ȏセ��͂���̏���Ȏv�����݁A�ԈႢ�Ȃ�v
���̃X���ɂ���ǐS�I�Ȑl�X
�u>>95 ����Ȃ��ƌ����Ă����̌��t���悭�킩��Ȃ���B���ꂱ�ꂱ���������Ƃ���Ȃ��́H�v
95
�u���邹�[�ڂ��B����̍l���ł͂��ꂱ�ꂱ���Ȃ��B���ꂪ�����ȏ�ԈႢ�Ȃ���v
���������̂����X�J��Ԃ���Ă邾���ɂ��������Ȃ��B�s�т��B
�R���95���u���Ă����ƗL�Ӌ`�ȋc�_���悤����3000�_�B
�u>>95 ���̌����Ă邱�Ƃ͗͊w�I�ɂ��܂�����Ȃ���B���ꂱ�ꂱ���������Ƃ���Ȃ��́H�v
95
�u���邹�[�ڂ��B����Ȑ����o����Ă����͗����ł���B���������ł���ȏセ��͂���̏���Ȏv�����݁A�ԈႢ�Ȃ�v
���̃X���ɂ���ǐS�I�Ȑl�X
�u>>95 ����Ȃ��ƌ����Ă����̌��t���悭�킩��Ȃ���B���ꂱ�ꂱ���������Ƃ���Ȃ��́H�v
95
�u���邹�[�ڂ��B����̍l���ł͂��ꂱ�ꂱ���Ȃ��B���ꂪ�����ȏ�ԈႢ�Ȃ���v
���������̂����X�J��Ԃ���Ă邾���ɂ��������Ȃ��B�s�т��B
�R���95���u���Ă����ƗL�Ӌ`�ȋc�_���悤����3000�_�B
394 �F���J�����������F05/02/01 06:25:11 ID:8YVwUpJg
���㔨�ƍH�w���̈ӌ��������Ċ����ł������낭���Ă��邯�ǂȁB
�X���^�C�ʂ�A����̓��s���瑖�s�ւ̐i�������������w�ۓI��
�Ƃ��납�琶�܂�Ă���C������B
�X���^�C�ʂ�A����̓��s���瑖�s�ւ̐i�������������w�ۓI��
�Ƃ��납�琶�܂�Ă���C������B
395 �F���J�����������F05/02/01 09:16:18 ID:4JI4za63
>>394
���ɂ�>>393�̂悤�Ɍ�����B
�ƂĂ��ӌ����u�����v����Ă���Ƃ͎v����B
95�͑��ς�炸�H�w�I�ȍl�����𗝉����悤�Ƃ����Ȃ��݂��������B
���ɂ�>>393�̂悤�Ɍ�����B
�ƂĂ��ӌ����u�����v����Ă���Ƃ͎v����B
95�͑��ς�炸�H�w�I�ȍl�����𗝉����悤�Ƃ����Ȃ��݂��������B
396 �F���J�����������F05/02/01 12:19:21 ID:KN45FvUa
�R��͒Z��������Ă邩��95����̌������͕��邼�B
���w�̍��Ɂu�^���ɉ����v�Ƃ����̂��ږ₩�畷�������Ƃ�����B
���݂̎嗬�́u�ڒn���ɏ�荞�ށv�Ƃ��u�^�[���I�[�o�[�i��Ԃ��j�v
�Ƃ����B
�u�n�ʂ����֏R��v�Ƃ����̂͂�������Ȃ����u���́v�͗���ł�
����܂�o�Ă��Ȃ��B�Ƃ������Ƃ́A�Ȃ���A�n�ʂ��R�������͂�
�i�ނƂ������Ƃɋ^��Ƃ͌���Ȃ��܂ł��A��������������͂��Ȃ�����
�����Ƃ��������ɂȂ��Ă��Ă�Ƃ������Ƃ��B
�u���̃e�R�v�Ƃ����̂͏��߂ĕ��������u�e�R�v�Ƃ����͍̂ŋ߂͂悭�����B
95����͉����͂���ł�Ǝv���ȁB
���ぁ�̈��n�̐l�i���Ԃ�j�ɉ^���������Ȃǎ����o���ȁB
���O�痤��̑f�l�̃N�Z�ɁA�����Ȃ���95����̌����Ă邱�Ƃ�ے肵�Ă邩��95��������ɂ����낤��B
���w�̍��Ɂu�^���ɉ����v�Ƃ����̂��ږ₩�畷�������Ƃ�����B
���݂̎嗬�́u�ڒn���ɏ�荞�ށv�Ƃ��u�^�[���I�[�o�[�i��Ԃ��j�v
�Ƃ����B
�u�n�ʂ����֏R��v�Ƃ����̂͂�������Ȃ����u���́v�͗���ł�
����܂�o�Ă��Ȃ��B�Ƃ������Ƃ́A�Ȃ���A�n�ʂ��R�������͂�
�i�ނƂ������Ƃɋ^��Ƃ͌���Ȃ��܂ł��A��������������͂��Ȃ�����
�����Ƃ��������ɂȂ��Ă��Ă�Ƃ������Ƃ��B
�u���̃e�R�v�Ƃ����̂͏��߂ĕ��������u�e�R�v�Ƃ����͍̂ŋ߂͂悭�����B
95����͉����͂���ł�Ǝv���ȁB
���ぁ�̈��n�̐l�i���Ԃ�j�ɉ^���������Ȃǎ����o���ȁB
���O�痤��̑f�l�̃N�Z�ɁA�����Ȃ���95����̌����Ă邱�Ƃ�ے肵�Ă邩��95��������ɂ����낤��B
397 �F���J�����������F05/02/01 13:30:54 ID:EKWtvdZi
>�����Ȃ���95����̌����Ă邱�Ƃ�ے肵�Ă邩��
�ނ���m�肵��������A���z�e�R�̐��̂ɋ����������
���̑�O��Ƃ��ďd�͋y�ѐڒn�_����̗͂̓��́i���́j������
���̂��ړ����邱�Ƃ͂Ȃ��B
�����e�R�ɂ��뉽�ɂ�����͂����邩��o�͂���킯�ŁA���͖����ɓ��͂��O�ɏo�čs���Ȃ�Ă̂�
�L���X�g���̏������ق��炢�̊�ՂȂ̂ŁA�����Ȃ����낤�ƁE�E�E�B
�ł���A�ǂ���������͂Ă���������悭�����]�����Ă�ƍl����̂����B
�������A������s�������Ől�̂̍\��(�ؑg�D�Ƃ����i�j���K�{�����Ȃ��
���{�b�g�ɉ��p�͂ł��Ȃ����낤�Ƃ������B
�Ȃ��Ȃ�l�̎������̂͂ł��Ă��l�̂���邱�Ƃ́A���݂̑f�ނƋ쓮���u�ł͂܂��܂������ꂾ����B
�Ȃ̂ŁA�ł���u���̃e�R�v���A�l�̂Ɏ����\���ł��L���ɓ������̂ł����ė~�����Ǝv���Ă��
����Ȃ瑬�����郍�{�b�g���ł��邩������Ȃ�����ȁB
�ނ���m�肵��������A���z�e�R�̐��̂ɋ����������
���̑�O��Ƃ��ďd�͋y�ѐڒn�_����̗͂̓��́i���́j������
���̂��ړ����邱�Ƃ͂Ȃ��B
�����e�R�ɂ��뉽�ɂ�����͂����邩��o�͂���킯�ŁA���͖����ɓ��͂��O�ɏo�čs���Ȃ�Ă̂�
�L���X�g���̏������ق��炢�̊�ՂȂ̂ŁA�����Ȃ����낤�ƁE�E�E�B
�ł���A�ǂ���������͂Ă���������悭�����]�����Ă�ƍl����̂����B
�������A������s�������Ől�̂̍\��(�ؑg�D�Ƃ����i�j���K�{�����Ȃ��
���{�b�g�ɉ��p�͂ł��Ȃ����낤�Ƃ������B
�Ȃ��Ȃ�l�̎������̂͂ł��Ă��l�̂���邱�Ƃ́A���݂̑f�ނƋ쓮���u�ł͂܂��܂������ꂾ����B
�Ȃ̂ŁA�ł���u���̃e�R�v���A�l�̂Ɏ����\���ł��L���ɓ������̂ł����ė~�����Ǝv���Ă��
����Ȃ瑬�����郍�{�b�g���ł��邩������Ȃ�����ȁB
>>397
>>���̑�O��Ƃ��ďd�͋y�ѐڒn�_����̗͂̓��́i���́j������
���̂��ړ����邱�Ƃ͂Ȃ��B
���̑�O��Ƃ����̂������Ȃ��̔ے�Ȃ�B�X�T�������Ă���
�u�e�R�̗͓_�͗V�r�v�Ƃ����̂������Ă݂��̂��H�@�R��͂���ő�����
�����̂ł���Ă݂���A�������X�s�[�h�ő��ꂽ���B���V�[�Y���͎g�킵�Ă��炤��B
>>95����A�g�킵�Ă�����č\���܂���ˁH
396�̂�����O��͐��E�̏펯�����A95����̌����悤�ɂ�����m���ɑ����A
�X�s�[�h���o�邵�A�y���B��������̂͊m������B�������玟�̒i�K�i�����Ƃ���
���̊��҂Ƃ������A���ꂪ���Ȃ̂��H���m���߂����C�ɂȂ��Ă�B
�R����w�Z�ŏK�������Ƃɂ����݂��Ă����A�N�̌��t���������A�u���ׂĂ��^���v
s�����̂͂���ɓ�����̂��������B
95����ɂ́A�w�Z�ŏK�������Ƃ������݂��Ȃ��Ƃ����悤�ȓ��̌ł��z�����u����
���炢�����Ǝv���܂��B
>>���̑�O��Ƃ��ďd�͋y�ѐڒn�_����̗͂̓��́i���́j������
���̂��ړ����邱�Ƃ͂Ȃ��B
���̑�O��Ƃ����̂������Ȃ��̔ے�Ȃ�B�X�T�������Ă���
�u�e�R�̗͓_�͗V�r�v�Ƃ����̂������Ă݂��̂��H�@�R��͂���ő�����
�����̂ł���Ă݂���A�������X�s�[�h�ő��ꂽ���B���V�[�Y���͎g�킵�Ă��炤��B
>>95����A�g�킵�Ă�����č\���܂���ˁH
396�̂�����O��͐��E�̏펯�����A95����̌����悤�ɂ�����m���ɑ����A
�X�s�[�h���o�邵�A�y���B��������̂͊m������B�������玟�̒i�K�i�����Ƃ���
���̊��҂Ƃ������A���ꂪ���Ȃ̂��H���m���߂����C�ɂȂ��Ă�B
�R����w�Z�ŏK�������Ƃɂ����݂��Ă����A�N�̌��t���������A�u���ׂĂ��^���v
s�����̂͂���ɓ�����̂��������B
95����ɂ́A�w�Z�ŏK�������Ƃ������݂��Ȃ��Ƃ����悤�ȓ��̌ł��z�����u����
���炢�����Ǝv���܂��B
399 �F���J�����������F05/02/02 01:11:05 ID:jzshe0yn
���́[�B
�����A�ꉞ�H�w�n�̔Ȃ�ŁB
���ł��Ƃ������Ă���������
�����A�ꉞ�H�w�n�̔Ȃ�ŁB
���ł��Ƃ������Ă���������
400 �F���J�����������F05/02/02 05:45:49 ID:wesPrjPq
>>396
���{�b�g���H�w�n�̐l�ɗ��t���̂Ȃ��o�����Ȃǎ����o���ȁB
���O�琔�w�̑f�l�̃N�Z�ɁA�����Ȃ��ɒ�ʓI�ɉ��߂��邱�Ƃ�ے肵�Ă邩�牴������ɂ��Ă�B
�Ă������A���O�牽���ɗ�����H���t�����~�����Ă��������ɗ�����Ȃ��̂��H
�P�Ɂu���Ȃ�ĈӖ��Ȃ���v�݂�����DQN���Ղ�Ӗ��ɔ��������������H
>���̑�O��Ƃ����̂������Ȃ��̔ے�Ȃ�B
�����̎������B�ςȎ�ςȂǓ���悤�̂Ȃ��A�ȁB
���{�b�g���H�w�n�̐l�ɗ��t���̂Ȃ��o�����Ȃǎ����o���ȁB
���O�琔�w�̑f�l�̃N�Z�ɁA�����Ȃ��ɒ�ʓI�ɉ��߂��邱�Ƃ�ے肵�Ă邩�牴������ɂ��Ă�B
�Ă������A���O�牽���ɗ�����H���t�����~�����Ă��������ɗ�����Ȃ��̂��H
�P�Ɂu���Ȃ�ĈӖ��Ȃ���v�݂�����DQN���Ղ�Ӗ��ɔ��������������H
>���̑�O��Ƃ����̂������Ȃ��̔ے�Ȃ�B
�����̎������B�ςȎ�ςȂǓ���悤�̂Ȃ��A�ȁB
401 �F���J�����������F05/02/02 08:20:00 ID:Xks2YN4a
>>400 >>�����̎������B�ςȎ�ςȂǓ���悤�̂Ȃ��A�ȁB
�@�@�@
�@�@�@�@������D��S�������ƌ�����B�Q�����Ȃ���N��������
�@�@�@�@�������č\���̂�����ق��Ƃ���B
�@�@�@
�@�@�@�@������D��S�������ƌ�����B�Q�����Ȃ���N��������
�@�@�@�@�������č\���̂�����ق��Ƃ���B
402 �F���J�����������F05/02/02 09:48:59 ID:jzshe0yn
�����炵�Ⴕ���o�Ă��āu���̂��Ƃق��Ƃ���v�Ƌ���>>401�G��
>>400
>���O�琔�w�̑f�l�̃N�Z�ɁA�����Ȃ��ɒ�ʓI�ɉ��߂��邱�Ƃ�
>�ے肵�Ă邩�牴������ɂ��Ă�B
�܂��܂��܂��A������
>>400
>���O�琔�w�̑f�l�̃N�Z�ɁA�����Ȃ��ɒ�ʓI�ɉ��߂��邱�Ƃ�
>�ے肵�Ă邩�牴������ɂ��Ă�B
�܂��܂��܂��A������
403 �F���J�����������F05/02/03 03:23:01 ID:pfnlVFep
>>397
>���̑�O��Ƃ��ďd�͋y�ѐڒn�_����̗͂̓��́i���́j������
>���̂��ړ����邱�Ƃ͂Ȃ��B
���́u���́v�Ƃ́A�q�g�̑����n�ʂ��R��ۂ̔���p���Ď��ł����H
>���̑�O��Ƃ��ďd�͋y�ѐڒn�_����̗͂̓��́i���́j������
>���̂��ړ����邱�Ƃ͂Ȃ��B
���́u���́v�Ƃ́A�q�g�̑����n�ʂ��R��ۂ̔���p���Ď��ł����H
404 �F���J�����������F05/02/03 09:53:31 ID:vbtpjTXA
��������b���ς��Ă݂悤�ƃR�R���~��B�@�j���̐���
http://www.namiashi.com/hihoukan/SP_hiroba.pdf
����ɂ��čH�w�I�A��H�w�I���ʂ���@�艺����̂͂ǂ���H
http://www.namiashi.com/hihoukan/SP_hiroba.pdf
����ɂ��čH�w�I�A��H�w�I���ʂ���@�艺����̂͂ǂ���H
405 �F���J�����������F05/02/03 11:10:35 ID:jilX5DI0
>���́u���́v�Ƃ́A�q�g�̑����n�ʂ��R��ۂ̔���p���Ď��ł����H
�����ł��B
�X�T���i���́j�ƒ�`���Ă�����͈̂�ʓI�ɂ͔���p���Ǝv���Ă܂��B
�����ł��B
�X�T���i���́j�ƒ�`���Ă�����͈̂�ʓI�ɂ͔���p���Ǝv���Ă܂��B
406 �F���J�����������F05/02/03 12:55:27 ID:pfnlVFep
>>405
���X���肪�Ƃ��������܂��B
����Ɏ���ł��B
>���̑�O��Ƃ��ďd�͋y�ѐڒn�_����̗͂̓��́i���́j������
>���̂��ړ����邱�Ƃ͂Ȃ��B
�Ƃ̎��ł����A�ȉ��̏ꍇ�ł����͂ɂ��ړ��Ƃ݂Ȃ����ł��傤���H
�E��������q�g������
�E�O���ɓ|�ꂱ��
�E�]�|�h�~�̂��߁A�E����O�ɏo���Đg�̂���������
�E�O�ɏo�����E���ɁA���������낦��
�E�ȉ����[�v
���ێ����Ă݂��̂ł����A���ꂾ�Ɣ��͂��g�킸�ɑO�Ɉړ����Ă���悤�Ɏv���܂��B
����Ƃ���������͂𗘗p�����ړ����@�Ȃ̂ł��傤���H
�����A�����E�l�ԍH�w�E����͂܂�őf�l�Ȃ̂łǂȂ���������������������K���ł���܂��B
���X���肪�Ƃ��������܂��B
����Ɏ���ł��B
>���̑�O��Ƃ��ďd�͋y�ѐڒn�_����̗͂̓��́i���́j������
>���̂��ړ����邱�Ƃ͂Ȃ��B
�Ƃ̎��ł����A�ȉ��̏ꍇ�ł����͂ɂ��ړ��Ƃ݂Ȃ����ł��傤���H
�E��������q�g������
�E�O���ɓ|�ꂱ��
�E�]�|�h�~�̂��߁A�E����O�ɏo���Đg�̂���������
�E�O�ɏo�����E���ɁA���������낦��
�E�ȉ����[�v
���ێ����Ă݂��̂ł����A���ꂾ�Ɣ��͂��g�킸�ɑO�Ɉړ����Ă���悤�Ɏv���܂��B
����Ƃ���������͂𗘗p�����ړ����@�Ȃ̂ł��傤���H
�����A�����E�l�ԍH�w�E����͂܂�őf�l�Ȃ̂łǂȂ���������������������K���ł���܂��B
407 �F���J�����������F05/02/03 13:21:21 ID:jilX5DI0
���͂ɂ��Ƃ������A��p����p�Ƃ������ق����킩��₷����������Ȃ��ł��ˁB
�q�g�̈ړ��Ɍ��炸���̂̈ړ��͍�p����p�̗��ɂ��܂��B
���݂���Ƃ������Ƃ���A���̗��̒��ɂ���ƍl�����܂��B
�q�g�̈ړ��Ɍ��炸���̂̈ړ��͍�p����p�̗��ɂ��܂��B
���݂���Ƃ������Ƃ���A���̗��̒��ɂ���ƍl�����܂��B
408 �F���J�����������F05/02/03 14:12:05 ID:GBU6C89m
>>406
�|���U�q�̃C���[�W���̂܂܂ł��ˁB
�ڒn��������̉^���́A�r���o�R���ē`�B����锽�͂��������
���̃A�i���W�[�͐������Ȃ��ł��B�\���I�ȗ͂̉��������������ŁA
��̂��x����=�d�́i+�����͂����ȁj�ɍR����K�v�Œ���̔��͂͏�ɍ�p����ł���B
�����Ŏv������ł����A>95���H�����͂��āA���������ā��̗͂�
����ɏR�蓮��ɂ���ĉ��Z���ꂽ�����������Ӗ����Ă���̂ł́A
�Ǝv���n�߂��������̍��B
�|���U�q�̃C���[�W���̂܂܂ł��ˁB
�ڒn��������̉^���́A�r���o�R���ē`�B����锽�͂��������
���̃A�i���W�[�͐������Ȃ��ł��B�\���I�ȗ͂̉��������������ŁA
��̂��x����=�d�́i+�����͂����ȁj�ɍR����K�v�Œ���̔��͂͏�ɍ�p����ł���B
�����Ŏv������ł����A>95���H�����͂��āA���������ā��̗͂�
����ɏR�蓮��ɂ���ĉ��Z���ꂽ�����������Ӗ����Ă���̂ł́A
�Ǝv���n�߂��������̍��B
409 �F���J�����������F05/02/03 14:15:34 ID:vbtpjTXA
���̈��͂ɂ��C�̒��̖��������̔���p���Ă̂͂ǂ��Ȃ�낤�H
410 �F���J�����������F05/02/03 15:06:54 ID:jilX5DI0
�������Ŏv������ł����A>95���H�����͂��āA���������ā��̗͂�
������ɏR�蓮��ɂ���ĉ��Z���ꂽ�����������Ӗ����Ă���̂ł́A
���Ǝv���n�߂��������̍��B
���������v���Ă����ǁA�X�T������������Ȃ�����͖{���ł͂Ȃ���
�ƌ��������Ă���ŏ��X�˘f���Ă�ł��B�X�T�̍l���锽�͂͏R�葫�̐i�s�����ւ̈ړ��݂̂Ȃ̂�
���͂�ے肵�Ă���߂�����悤�ɂ͊�������ǁA�ق�Ƃɂ����Ȃ̂��X�T�̌���������͒f��ł��Ȃ������B
�Ƃ������A���蓮��ɂ���ĉ��Z���ꂽ���Ə����͂��A�����悭���i�͂Ƃ��ė��p������@���Ď��Ȃ�
���܂�������ł����������Ƃł����ė~�������ǁB
������ɏR�蓮��ɂ���ĉ��Z���ꂽ�����������Ӗ����Ă���̂ł́A
���Ǝv���n�߂��������̍��B
���������v���Ă����ǁA�X�T������������Ȃ�����͖{���ł͂Ȃ���
�ƌ��������Ă���ŏ��X�˘f���Ă�ł��B�X�T�̍l���锽�͂͏R�葫�̐i�s�����ւ̈ړ��݂̂Ȃ̂�
���͂�ے肵�Ă���߂�����悤�ɂ͊�������ǁA�ق�Ƃɂ����Ȃ̂��X�T�̌���������͒f��ł��Ȃ������B
�Ƃ������A���蓮��ɂ���ĉ��Z���ꂽ���Ə����͂��A�����悭���i�͂Ƃ��ė��p������@���Ď��Ȃ�
���܂�������ł����������Ƃł����ė~�������ǁB
411 �F���J�����������F05/02/03 15:24:58 ID:p0Ef6l2a
�����Ŋ��荞�݁B���ꕗ�̏Z�l�B�ᑭ�ʼn���(���o���Ă܂�)
�݂�ȁA�����[�ʔ����B�����܂œǂ�ŕ�����Ȃ�����t��������
���܂��炪��ݶ�ڂ���̓��{�����v�����V�����B��ݶޯø�
���̌�͖��ق���ROM���B���[��������������ƑO�ɕ����Ƃ��悩����yo�B
�݂�ȁA�����[�ʔ����B�����܂œǂ�ŕ�����Ȃ�����t��������
���܂��炪��ݶ�ڂ���̓��{�����v�����V�����B��ݶޯø�
���̌�͖��ق���ROM���B���[��������������ƑO�ɕ����Ƃ��悩����yo�B
412 �F���J�����������F05/02/03 16:16:54 ID:O3FKf37o
>>409
�Ⴂ�Ǝv���E�E�E�A�n���̎��]���x���Ȃ��Ă����B
�Ⴂ�Ǝv���E�E�E�A�n���̎��]���x���Ȃ��Ă����B
>>412 409��407�� >>���̂̈ړ��͍�p����p�̗��ɂ��܂��B���݂���Ƃ������Ƃ���A
���̗��̒��ɂ���ƍl�����܂��B
�Ƃ����̂Ƀt�g�^�₪�N�������̂ł�����B�c�ŁA�n���̎��]�͕ʂɒx���Ȃ��Ă����ĂȂ����B
����������͖��������璆�ł���킯�����B
���̗��̒��ɂ���ƍl�����܂��B
�Ƃ����̂Ƀt�g�^�₪�N�������̂ł�����B�c�ŁA�n���̎��]�͕ʂɒx���Ȃ��Ă����ĂȂ����B
����������͖��������璆�ł���킯�����B
414 �F���J�����������F05/02/03 16:44:21 ID:O3FKf37o
415 �F���J�����������F05/02/04 02:04:52 ID:e5aumLV9
>>406
> �Ƃ̎��ł����A�ȉ��̏ꍇ�ł����͂ɂ��ړ��Ƃ݂Ȃ����ł��傤���H
> �E��������q�g������
> �E�O���ɓ|�ꂱ��
> �E�]�|�h�~�̂��߁A�E����O�ɏo���Đg�̂���������
> �E�O�ɏo�����E���ɁA���������낦��
> �E�ȉ����[�v
> ���ێ����Ă݂��̂ł����A���ꂾ�Ɣ��͂��g�킸�ɑO�Ɉړ����Ă���悤�Ɏv���܂��B
���������d�͂ɂ�鉺�����̉����x������ɂ�������炸
�n�ʂ�˂������Ă͂邩���֗����Ă����Ȃ��̂͂Ȃ����Ƃ�����
�n�ʂ��珰���͂��Ă��邩��B
�̂ɗ����Ă邾���ł������͓͂����Ă���B
��������l���O���ɓ|�ꂱ�ނƂ����̂������͂Ȃ��ɂ͂��肦�Ȃ�����[�킯����
���̌����Ƃ���>>95���̌����u���́v�͒n�ʂ���Ă���u�����́v�̂���
�w��������d�S�Ɍ����Ă̒����I�Ȑ����x
�w�r�̒����쓮����������L���́x
�̂����ꂩ���_�|�̓s���ɂ���Ĝ��ӓI�ɍ̗p����A����ȊO�̐�����
�ǂ��������ǂ��߂����Ă��˔@��̂ق��ɉe������
�w�e�R�x���`�����Ă��邩�̂悤�ȍ��o��^���Ă���̂��Ǝv�����
> �Ƃ̎��ł����A�ȉ��̏ꍇ�ł����͂ɂ��ړ��Ƃ݂Ȃ����ł��傤���H
> �E��������q�g������
> �E�O���ɓ|�ꂱ��
> �E�]�|�h�~�̂��߁A�E����O�ɏo���Đg�̂���������
> �E�O�ɏo�����E���ɁA���������낦��
> �E�ȉ����[�v
> ���ێ����Ă݂��̂ł����A���ꂾ�Ɣ��͂��g�킸�ɑO�Ɉړ����Ă���悤�Ɏv���܂��B
���������d�͂ɂ�鉺�����̉����x������ɂ�������炸
�n�ʂ�˂������Ă͂邩���֗����Ă����Ȃ��̂͂Ȃ����Ƃ�����
�n�ʂ��珰���͂��Ă��邩��B
�̂ɗ����Ă邾���ł������͓͂����Ă���B
��������l���O���ɓ|�ꂱ�ނƂ����̂������͂Ȃ��ɂ͂��肦�Ȃ�����[�킯����
���̌����Ƃ���>>95���̌����u���́v�͒n�ʂ���Ă���u�����́v�̂���
�w��������d�S�Ɍ����Ă̒����I�Ȑ����x
�w�r�̒����쓮����������L���́x
�̂����ꂩ���_�|�̓s���ɂ���Ĝ��ӓI�ɍ̗p����A����ȊO�̐�����
�ǂ��������ǂ��߂����Ă��˔@��̂ق��ɉe������
�w�e�R�x���`�����Ă��邩�̂悤�ȍ��o��^���Ă���̂��Ǝv�����
���X���������ĊF�l�A���肪�Ƃ��������܂��B
���͂̒�`������܂����B
���͂̒�`������܂����B
>>406 408��415�̌����Ă�̂ł͑̏d���x���Ă��镪�́u���͂��w���݂��Ă���x�v
�Ƃ������Ƃɂ����Ȃ�Ȃ��̂ŁA�u���͂��w�g���āx�O�Ɉړ����Ă���v�Ƃ���
���Ƃɂ͂Ȃ�Ȃ���Ȃ����H
410��>>�X�T�̍l���锽�͂͏R�葫�̐i�s�����ւ̈ړ��݂̂Ȃ̂�
���͂�ے肵�Ă���߂�����悤�ɂ͊�������ǁA
�ق�Ƃɂ����Ȃ̂��X�T�̌���������͒f��ł��Ȃ������B
�R������܂ł̑�����͒n�ʂ����֏R�����Ă�������A���̔��͂Ƃ�����
�O�����̗͂ŁA�X�T���ے�H�@���ɂ����͂��炢�Đ��i�͂ɂ͂Ȃ��Ƃ������Ƃ��ȁH
�X�s�[�h���オ���Ă����ς������ς��ɂȂ�ƁA�R���Ă��育�����������Ȃ���
����̂��Ƃ��������B���ꂾ�����炱�̂���n�}���Ă���X�T����̂����������
�n�ʂ����֏R��Ȃ����A�����ς������ς��ɂȂ�Ȃ�����A��������ɂ�
������B�V�r���͓_�ɂȂ�e�R�ƍ��o����̂�����Ƃ͂Ȃ���B
406������Ă݂���H�R������낢�뎎���Ă݂����ǁA�G���グ��悤�ɂ���Ƌ�U��݂�����
�Ȃ��ŁA�����ԑO�ɏ����Ă������u�����̗�����O�ɓ˂��o���v�悤�ɂ���̂�
��ԗǂ��悤����B
�Ƃ������Ƃɂ����Ȃ�Ȃ��̂ŁA�u���͂��w�g���āx�O�Ɉړ����Ă���v�Ƃ���
���Ƃɂ͂Ȃ�Ȃ���Ȃ����H
410��>>�X�T�̍l���锽�͂͏R�葫�̐i�s�����ւ̈ړ��݂̂Ȃ̂�
���͂�ے肵�Ă���߂�����悤�ɂ͊�������ǁA
�ق�Ƃɂ����Ȃ̂��X�T�̌���������͒f��ł��Ȃ������B
�R������܂ł̑�����͒n�ʂ����֏R�����Ă�������A���̔��͂Ƃ�����
�O�����̗͂ŁA�X�T���ے�H�@���ɂ����͂��炢�Đ��i�͂ɂ͂Ȃ��Ƃ������Ƃ��ȁH
�X�s�[�h���オ���Ă����ς������ς��ɂȂ�ƁA�R���Ă��育�����������Ȃ���
����̂��Ƃ��������B���ꂾ�����炱�̂���n�}���Ă���X�T����̂����������
�n�ʂ����֏R��Ȃ����A�����ς������ς��ɂȂ�Ȃ�����A��������ɂ�
������B�V�r���͓_�ɂȂ�e�R�ƍ��o����̂�����Ƃ͂Ȃ���B
406������Ă݂���H�R������낢�뎎���Ă݂����ǁA�G���グ��悤�ɂ���Ƌ�U��݂�����
�Ȃ��ŁA�����ԑO�ɏ����Ă������u�����̗�����O�ɓ˂��o���v�悤�ɂ���̂�
��ԗǂ��悤����B
>>417
>�̏d���x���Ă��镪�́u���͂��w���݂��Ă���x�v
>�Ƃ������Ƃɂ����Ȃ�Ȃ��̂ŁA�u���͂��w�g���āx�O�Ɉړ����Ă���v�Ƃ���
>���Ƃɂ͂Ȃ�Ȃ���Ȃ����H
���̂̉^�����ێ�����ɂ́u�������Ȃ��v�͂̍�p�Ȃ̂ł����āA
���̂̉��������ɑ���ړ��Ƃ������^�����S�����Ă܂��B
�����A���Ŏ锽�͂͏�ɉ��������ł͂Ȃ��̂ŁA
�Ⴆ�Ώd�S�������O���Ɉʒu����A���̔��́i�̃x�N�g���j�͎�����
�O�����ɌX�i�\�����������ȁj�����`�ō�p����ł���B
���̐��������͏��Ȃ��炸���i�͂Ƃ��č�p���邾�낤���Ă��ƁB
>406�ɑ���Ƃ��āu�K�v�s���v������u�g���āv����ƌ������ł́B
�u�g���āv�������Ӗ����u�\���I�v�ȈӖ������A�܂�u���i�͂̉����v��v������Ȃ�
>406�̃A�i���W�[�͎g���Ė����Ƃ����邩������Ȃ��B
�u���z�e�R�͌o��������m���ɂ��肻�����v�Ƃ����̂͗ǂ��`����Ă���A
������ǂ��͊w�Ɋ�Â��Ē�ʓI�ɒ莮�����邩�������ł̋c�_���Ǝv���̂ŁA
�H�w���Șb�Ƃ��Ă�>95�ɂ͂�����ӂ��ϋl�߂Ă��炢�����ȁ[�B
�Ⴆ�A���z�e�R����������ɂ͉^�����f�����ǂ��\�z�E�\������Ηǂ����Ȃ낤���A�Ƃ����B
�����������ꂪ���@������͊w��͂Ȃł���('A`)ɼ
�@�@�@ ��
�@�@�@�@|
�@�^�P�P�^�@������Ȃ̂Ƃ��B�e�����N�͍��̂��Ƃ��B���R�x�͕K�v�Œ���Ƃ��Betc
�^�@�@�@�^�@
�_�@�@ �_
�@�_ �@�@�_
�@�P�@�@�@�P
>�̏d���x���Ă��镪�́u���͂��w���݂��Ă���x�v
>�Ƃ������Ƃɂ����Ȃ�Ȃ��̂ŁA�u���͂��w�g���āx�O�Ɉړ����Ă���v�Ƃ���
>���Ƃɂ͂Ȃ�Ȃ���Ȃ����H
���̂̉^�����ێ�����ɂ́u�������Ȃ��v�͂̍�p�Ȃ̂ł����āA
���̂̉��������ɑ���ړ��Ƃ������^�����S�����Ă܂��B
�����A���Ŏ锽�͂͏�ɉ��������ł͂Ȃ��̂ŁA
�Ⴆ�Ώd�S�������O���Ɉʒu����A���̔��́i�̃x�N�g���j�͎�����
�O�����ɌX�i�\�����������ȁj�����`�ō�p����ł���B
���̐��������͏��Ȃ��炸���i�͂Ƃ��č�p���邾�낤���Ă��ƁB
>406�ɑ���Ƃ��āu�K�v�s���v������u�g���āv����ƌ������ł́B
�u�g���āv�������Ӗ����u�\���I�v�ȈӖ������A�܂�u���i�͂̉����v��v������Ȃ�
>406�̃A�i���W�[�͎g���Ė����Ƃ����邩������Ȃ��B
�u���z�e�R�͌o��������m���ɂ��肻�����v�Ƃ����̂͗ǂ��`����Ă���A
������ǂ��͊w�Ɋ�Â��Ē�ʓI�ɒ莮�����邩�������ł̋c�_���Ǝv���̂ŁA
�H�w���Șb�Ƃ��Ă�>95�ɂ͂�����ӂ��ϋl�߂Ă��炢�����ȁ[�B
�Ⴆ�A���z�e�R����������ɂ͉^�����f�����ǂ��\�z�E�\������Ηǂ����Ȃ낤���A�Ƃ����B
�����������ꂪ���@������͊w��͂Ȃł���('A`)ɼ
�@�@�@ ��
�@�@�@�@|
�@�^�P�P�^�@������Ȃ̂Ƃ��B�e�����N�͍��̂��Ƃ��B���R�x�͕K�v�Œ���Ƃ��Betc
�^�@�@�@�^�@
�_�@�@ �_
�@�_ �@�@�_
�@�P�@�@�@�P
95��409�i��396�ł���ˁH�j�̌����s�v�c�ȉ����͏d�͂������Ȃ̂ł͂Ȃ��ł��傤���H
�]�Ԃ̂��M���M���ʼn��������A�݂����ȁB���`��|�������\���Ȃ��c
�]�Ԃ̂��M���M���ʼn��������A�݂����ȁB���`��|�������\���Ȃ��c
420 �F���J�����������F05/02/05 13:13:20 ID:2z/ewmWQ
>>419
408��������悤�ɂ���͑����|���U�q���f�����Ǝv���܂��B
���R���̏ꍇ�ł��A�O�i���Ă邩��ɂ͏�����O���֗͂��Ă܂��B
�����͂Ȃ�ƂȂ�ZMP�K�͂����|���U�q�K�͂̕����D���ł����B
408��������悤�ɂ���͑����|���U�q���f�����Ǝv���܂��B
���R���̏ꍇ�ł��A�O�i���Ă邩��ɂ͏�����O���֗͂��Ă܂��B
�����͂Ȃ�ƂȂ�ZMP�K�͂����|���U�q�K�͂̕����D���ł����B
421 �F409�ł͂Ȃ�396�F05/02/05 13:46:06 ID:9rtErayH
�R��A�������Ⴂ�����̂��A417��409�Ə������܂����B�{����409����A�X�}�\�B
95����͉��Č����������ǁA�R�������͓|���U�q���f�����낤�Ǝv���B
�ł������Ă��鎞�Ɋ�����̂́A�|���Ƃ��ł͂Ȃ��A����������Ă���Ƃ������A
������i��ł����悤�ȁA�������Ă�悤�ȁA�{���ɕs�v�c�Ȋ��o�Ȃ�B
�s�v�c���łɂ�����������܂����A�X�s�[�h���オ��ƁA�����n�ʂ�
�����V���b�N���S�R�������Ȃ��Ȃ��B���ꂾ�ƃX�p�C�N���v��Ȃ���Ȃ����ȁH
95����͉��Č����������ǁA�R�������͓|���U�q���f�����낤�Ǝv���B
�ł������Ă��鎞�Ɋ�����̂́A�|���Ƃ��ł͂Ȃ��A����������Ă���Ƃ������A
������i��ł����悤�ȁA�������Ă�悤�ȁA�{���ɕs�v�c�Ȋ��o�Ȃ�B
�s�v�c���łɂ�����������܂����A�X�s�[�h���オ��ƁA�����n�ʂ�
�����V���b�N���S�R�������Ȃ��Ȃ��B���ꂾ�ƃX�p�C�N���v��Ȃ���Ȃ����ȁH
�l���֎q�ɍ��|���Ă���Ƃ��܂��B
���̎��ˑR�֎q�����ł��܂����B
�������Ȃ�����̐l�͐K�݂�˂��܂��B
�ł́A�G���牺�݂̂����ď�̂��x���悤�Ƃ�����ǂ��Ȃ�ł��傤�H
���Ɉ��������邩�̂悤�Ɉړ�����̂ł��B
���ۂ��̂悤�ȓ������o���������Ƃ�����܂��i���̎��͋r�̓�������̂ɒǂ������A
�₪�ĐK�݂�˂��܂������j
���̎��̊��o�́A�܂���421�Ǝ����悤�Ȃ��̂ł����i�i�s�����͋t�ł����j
�ǂȂ��������Ă݂Ă��������B
���̎��ˑR�֎q�����ł��܂����B
�������Ȃ�����̐l�͐K�݂�˂��܂��B
�ł́A�G���牺�݂̂����ď�̂��x���悤�Ƃ�����ǂ��Ȃ�ł��傤�H
���Ɉ��������邩�̂悤�Ɉړ�����̂ł��B
���ۂ��̂悤�ȓ������o���������Ƃ�����܂��i���̎��͋r�̓�������̂ɒǂ������A
�₪�ĐK�݂�˂��܂������j
���̎��̊��o�́A�܂���421�Ǝ����悤�Ȃ��̂ł����i�i�s�����͋t�ł����j
�ǂȂ��������Ă݂Ă��������B
>>422 ����́A���Ă������Ȃ��Ƃ����v���Ȃ����ǂȁB
422�̂͐K���`�����܂ł̐��������̂��Ƃ�����ǁA�R���(95����̂�������)�́A
�X�s�[�h���オ��܂����ēr������O���Ǝp���������Ȃ��āA������ł�݂����ɂȂ�B
���̎��ɂ͏㔼�g�͂܂����������Ă邵�A�܂��A���Ȃ��Ƃ��]�ԂƂ������Ƃ����
�S�R��������B
422�̂͐K���`�����܂ł̐��������̂��Ƃ�����ǁA�R���(95����̂�������)�́A
�X�s�[�h���オ��܂����ēr������O���Ǝp���������Ȃ��āA������ł�݂����ɂȂ�B
���̎��ɂ͏㔼�g�͂܂����������Ă邵�A�܂��A���Ȃ��Ƃ��]�ԂƂ������Ƃ����
�S�R��������B
���`��Ⴄ�̂��B�c�O�ł���܂���B
������������A�d�S�ʒu�̏㉺�����S��������Ԃő����Ă���̂��ȁH
>>406
���̏�}������Ɓ��������Ȋ����ɂȂ邩�ȁB
ttp://49uper.com:8080/html/img-s/38537.jpg
���̐}�͕Б��������Ԃł̏d�S�ɂ������ڂ����͂̍�p�W�Ȃ��ǁA
�r�A��̂͏ȗ����Ă��ł�����Ƃ킩�����ȁB
�P���Ȏ��_�|���U�q���f���A�ł��r���͉ρi�G�̋��L�ɑ����j�ł��B
�i�e�L�g�[�ɍ�}������ŽϿ�j
���ƁA�F�d�́A�F�����́A�ԁF�d�͂Ə����͂̍��́A�ł��B
�ڒn���͊��炸�A��������Ɖ���A�d�͈͂��Ƃ��܂��B
�]�|������̂��ێ��A���̏ꍇ����������ۂƂ��Ƃ���i�S������j�ƁA
�d�S���O�i����ɂ�Ĕ��͂Əd�͂̍��́A�܂�i�s�����̐��i�͂�
������̂��킩��܂��B
>406���̌o���������Ƃ́A����ɑ�������Ǝv���܂����ǂ��ł��傤�H
���̏�}������Ɓ��������Ȋ����ɂȂ邩�ȁB
ttp://49uper.com:8080/html/img-s/38537.jpg
{kind=link}
���̐}�͕Б��������Ԃł̏d�S�ɂ������ڂ����͂̍�p�W�Ȃ��ǁA
�r�A��̂͏ȗ����Ă��ł�����Ƃ킩�����ȁB
�P���Ȏ��_�|���U�q���f���A�ł��r���͉ρi�G�̋��L�ɑ����j�ł��B
�i�e�L�g�[�ɍ�}������ŽϿ�j
���ƁA�F�d�́A�F�����́A�ԁF�d�͂Ə����͂̍��́A�ł��B
�ڒn���͊��炸�A��������Ɖ���A�d�͈͂��Ƃ��܂��B
�]�|������̂��ێ��A���̏ꍇ����������ۂƂ��Ƃ���i�S������j�ƁA
�d�S���O�i����ɂ�Ĕ��͂Əd�͂̍��́A�܂�i�s�����̐��i�͂�
������̂��킩��܂��B
>406���̌o���������Ƃ́A����ɑ�������Ǝv���܂����ǂ��ł��傤�H
>>420 �������͂ŁA���̒����������͂̑傫����������A���傫���Ȃ��Ă������ȁH
�ȂςȊ����B������āA���Ⴊ��ł邾������H�@�������͂��傫���Ȃ����
���ƂȂ�A�j�����݂����ɂ��Ⴊ�݂Ȃ��瑫�˂������Ă���Ă��ƂɂȂ�Ȃ����H
�ȂςȊ����B������āA���Ⴊ��ł邾������H�@�������͂��傫���Ȃ����
���ƂȂ�A�j�����݂����ɂ��Ⴊ�݂Ȃ��瑫�˂������Ă���Ă��ƂɂȂ�Ȃ����H
>>425 �X�s�[�h���O���`���Əオ���Ă����ƃt���b�ƈ�i�����Ȃ��ăX�[�b�Ɗ���悤�Ȋ����ɂȂ�B
�d�S�̏㉺���͂قƂ�ǂƂ������S�R�����Ȃ��Ă��銴������B
�d�S�̏㉺���͂قƂ�ǂƂ������S�R�����Ȃ��Ă��銴������B
>>427
����r���L�тĂ��镪�A���͂��傫���Ȃ�̂ł͂Ȃ��ł��傤���H
>>426
����Ȋ��������B
���Ƃ͓]�|�h�~�̂��ߋr��i�s�����ɂ����Ă��邾���ł��ˁB
����r���L�тĂ��镪�A���͂��傫���Ȃ�̂ł͂Ȃ��ł��傤���H
>>426
����Ȋ��������B
���Ƃ͓]�|�h�~�̂��ߋr��i�s�����ɂ����Ă��邾���ł��ˁB
>>427
���ۉ����Ă����ŋɒ[�ȗႾ���ǁA
���_�Ō����Η͂̍�p�͂���ȊO�����̂͂킩��Ǝv���B
�d�S���ړ��ɔ����Đ��i�͂������n�߂�Ɠ����ɑ���ɐ��������̖��C�͂������āA
���͂̐�Βl�͑傫���Ȃ��B
�d�S�̏㉺���������Ȃ���Ċ��z����݂āA
����ϒ������f�����ۂ��ɋ߂��Ǝv���B
���r���������Ă݂����A��a�������Ղ肗�@
ttp://49uper.com:8080/html/img-s/38739.jpg
�ł���A>428�̑��s���̓���̂������Ƌq�ϓI�ȕ`�ʂ��~�����B
>�X�s�[�h���O���`���Əオ���Ă����ƃt���b�ƈ�i�����Ȃ��ăX�[�b�Ɗ���悤�Ȋ����ɂȂ�B
�������̕ω�����O��ł̃t�H�[���Ƃ���������̕ω��Ƃ�����A���킵���B
�b�ցE�M�j�}�����Ă��炦��Ə���������Ȃ��ėǂ����ǁE�E�E�B
>>429
���f���͒P�������A���s�ƂȂ�ƒ���̖�肪�����ŁA
�����ł͂܂��A�ЂƂ̖ϑz���x�Ɏv���Ă���������
���ۉ����Ă����ŋɒ[�ȗႾ���ǁA
���_�Ō����Η͂̍�p�͂���ȊO�����̂͂킩��Ǝv���B
�d�S���ړ��ɔ����Đ��i�͂������n�߂�Ɠ����ɑ���ɐ��������̖��C�͂������āA
���͂̐�Βl�͑傫���Ȃ��B
�d�S�̏㉺���������Ȃ���Ċ��z����݂āA
����ϒ������f�����ۂ��ɋ߂��Ǝv���B
���r���������Ă݂����A��a�������Ղ肗�@
ttp://49uper.com:8080/html/img-s/38739.jpg
{kind=link}
�ł���A>428�̑��s���̓���̂������Ƌq�ϓI�ȕ`�ʂ��~�����B
>�X�s�[�h���O���`���Əオ���Ă����ƃt���b�ƈ�i�����Ȃ��ăX�[�b�Ɗ���悤�Ȋ����ɂȂ�B
�������̕ω�����O��ł̃t�H�[���Ƃ���������̕ω��Ƃ�����A���킵���B
�b�ցE�M�j�}�����Ă��炦��Ə���������Ȃ��ėǂ����ǁE�E�E�B
>>429
���f���͒P�������A���s�ƂȂ�ƒ���̖�肪�����ŁA
�����ł͂܂��A�ЂƂ̖ϑz���x�Ɏv���Ă���������
�q�ϓI�ɁA���B�r�f�I�^���Ă����ɂႢ����ˁB
�������͕ω����Ȃ���B�����Ɖ��������������Ċ�������B��邱�Ƃ�����������������ˁB
����̈Ⴂ���Ă����ƁA�C�X�ɍ��|�����Ȃ��Ƃ������A�R�P�Ȃ��悤�ɑ����o���A
�Ƃ������A���˓I�ɑ����o�Ă��邾������H
95����̂�������ł́A�ϋɓI�ɑ���O�Ɉ����o����B
�������͕ω����Ȃ���B�����Ɖ��������������Ċ�������B��邱�Ƃ�����������������ˁB
����̈Ⴂ���Ă����ƁA�C�X�ɍ��|�����Ȃ��Ƃ������A�R�P�Ȃ��悤�ɑ����o���A
�Ƃ������A���˓I�ɑ����o�Ă��邾������H
95����̂�������ł́A�ϋɓI�ɑ���O�Ɉ����o����B
432 �F���J�����������F05/02/06 21:57:56 ID:tP2jlxYb
�Ȃ�ł��������Ȃ́H
>>430�̖��O��408�̊ԈႢ�ł́H
434 �F���J�����������F05/02/07 10:34:42 ID:P9wi1tCw
�l�T�C�g�����[���ł���B
435 �F���J�����������F05/02/07 10:58:26 ID:/FIqQOFn
�����ő����ė~�����ȁA�����[���b����B
>>406
���ւ��A�Ԉ���Ă�orz�B�Ͽ�B
>>431
�V�r�̎戵���͂��̉���E�v�l�ł͖�肶��Ȃ��B
�B��A�d�S������ۂƂ��Ƃ��邱�Ǝ��̂����i�͂̔����Ɋ�^����B
�ʂɏR�肾���ł���ɉ����A�Ƃ����ᖳ���ɁB
�ł��V�r�̐U��o���Ƃ������A���̓��삪�^���S�̂ɋy�ڂ��e�����Ă̂�
�����ł��Ȃ��͎̂����Ȃ��Ȃ��B
���ւ��A�Ԉ���Ă�orz�B�Ͽ�B
>>431
�V�r�̎戵���͂��̉���E�v�l�ł͖�肶��Ȃ��B
�B��A�d�S������ۂƂ��Ƃ��邱�Ǝ��̂����i�͂̔����Ɋ�^����B
�ʂɏR�肾���ł���ɉ����A�Ƃ����ᖳ���ɁB
�ł��V�r�̐U��o���Ƃ������A���̓��삪�^���S�̂ɋy�ڂ��e�����Ă̂�
�����ł��Ȃ��͎̂����Ȃ��Ȃ��B
�����A�N���ǂ���c���āA�R���������܂��Ă��Őӂ߂����ˁB
436�Ō����Ă邱�ƂŁA423�Łu�C�X���Łv�Ɓu95����̂�������v�Ƃ��S�R�Ⴄ��
���������ƂɁA�_�������Ƃ������A���t���Ƃ܂ł͂����Ȃ����낤���ǁA������Ɛ�����
�Ȃ����悤�Ȋ������ˁB
436�Ō����Ă邱�ƂŁA423�Łu�C�X���Łv�Ɓu95����̂�������v�Ƃ��S�R�Ⴄ��
���������ƂɁA�_�������Ƃ������A���t���Ƃ܂ł͂����Ȃ����낤���ǁA������Ɛ�����
�Ȃ����悤�Ȋ������ˁB
438 �F���J�����������F05/02/07 20:57:33 ID:H9HWvEEA
426��430�̐}������ƁA�ڒn�r���d�S�_�����ɂȂ�Ȃ�قǏd�͂����
�����������傫���Ȃ��ˁA���Ă��Ƃ͂��A�����Ă�Œ��̐ڒn�r�͗�������
���O����ԑ傫�����i�͂���������Ă��Ƃ��ȁH
�����������傫���Ȃ��ˁA���Ă��Ƃ͂��A�����Ă�Œ��̐ڒn�r�͗�������
���O����ԑ傫�����i�͂���������Ă��Ƃ��ȁH
>438
���̃��f�����Ƃ����Ȃ����Ⴄ���ȁB
���_�ŁA����ׂ͂����ŁA�V�r�����ŁA�P�r�x����Ԃ����̍l�@������
�Ȃ�Ƃ������l�����邾�낤���ǁA�Œ���i�s���̂����H�j��
�G�b�Z���X���o�������ʂȂ̂Ō����ɂ�����Ȃ�����������͎̂~�ނ܂��ʁB
���_����Ȃ��č��̃��f���ŁA�D�r���l�������l�@������Ƃ������ƈႤ���ʂ��ς��邩���B
>39��6�̌����悤��>95���̑��@�͗V�r��O�Ɉ����o�����@�̂悤�����A
�V�r�̐U�������̓I�ɂǂ��Ȃ̂��悭�����ĂȂ����ǁA�ӊO�Ƃ����������ʂ�����̂����B
�Ƃ肠����>95���̍ėՂ�҂��Ă��ƂŁB
���̃��f�����Ƃ����Ȃ����Ⴄ���ȁB
���_�ŁA����ׂ͂����ŁA�V�r�����ŁA�P�r�x����Ԃ����̍l�@������
�Ȃ�Ƃ������l�����邾�낤���ǁA�Œ���i�s���̂����H�j��
�G�b�Z���X���o�������ʂȂ̂Ō����ɂ�����Ȃ�����������͎̂~�ނ܂��ʁB
���_����Ȃ��č��̃��f���ŁA�D�r���l�������l�@������Ƃ������ƈႤ���ʂ��ς��邩���B
>39��6�̌����悤��>95���̑��@�͗V�r��O�Ɉ����o�����@�̂悤�����A
�V�r�̐U�������̓I�ɂǂ��Ȃ̂��悭�����ĂȂ����ǁA�ӊO�Ƃ����������ʂ�����̂����B
�Ƃ肠����>95���̍ėՂ�҂��Ă��ƂŁB
95����A���Ă���ĂȂ��ȁB
�悤�₭�r�f�I��^�悵�Ď����̃t�H�[�������邱�Ƃ��ł����B
�ꌩ����Ɨ͂̓�������t�Ȃ̂ɁA���ʂ̑�����ƕς�͂Ȃ��B
�ŁA�ߑO����̊G�ł͂������������A������̊G�ɂȂ�ƑS�R������B
�̂���C�O�̈ꗬ�I��̃r�f�I�͂悭���Ă����ǁA����ɂ�������Ȃق�
�������オ���đ����O��ɂ悭�J���Ă���B���ɂ͌��֏R��悤�ȗ͂�
��ؓ���ĂȂ��̂ɁA���֏R���Ă��������͂邩�ɂ悭���ɐL�тĂ�B
438�Ō����Ă�u�����Ă�Œ��̐ڒn�r�͗������鐡�O����ԑ傫�����i�͂�
������������Ă��Ɓv�Ƃ����̂��[���ł�����ǁA�͂͂���ȕ����ɂ�
�S�R����ĂȂ���ŕs�v�c��������B
�悤�₭�r�f�I��^�悵�Ď����̃t�H�[�������邱�Ƃ��ł����B
�ꌩ����Ɨ͂̓�������t�Ȃ̂ɁA���ʂ̑�����ƕς�͂Ȃ��B
�ŁA�ߑO����̊G�ł͂������������A������̊G�ɂȂ�ƑS�R������B
�̂���C�O�̈ꗬ�I��̃r�f�I�͂悭���Ă����ǁA����ɂ�������Ȃق�
�������オ���đ����O��ɂ悭�J���Ă���B���ɂ͌��֏R��悤�ȗ͂�
��ؓ���ĂȂ��̂ɁA���֏R���Ă��������͂邩�ɂ悭���ɐL�тĂ�B
438�Ō����Ă�u�����Ă�Œ��̐ڒn�r�͗������鐡�O����ԑ傫�����i�͂�
������������Ă��Ɓv�Ƃ����̂��[���ł�����ǁA�͂͂���ȕ����ɂ�
�S�R����ĂȂ���ŕs�v�c��������B
���{�b�g�Ƃ͗��ꂽ�c�_�����������������r�[�ɐl���������Ȃ��B
>430�Ŏ������}��>95���̑��s�̂���ꕔ�𒊏ۉ����čl�����
�͊w�I�ɂ����Ɩ{���͂���Ȃ�Ȃ����ȁA���Ęb�B
���z�e�R�Ƃ̊֘A�͌��y���ĂȂ����A���f�����P����������
�b������������ɂ͂܂��������ށB
�ނ���A�����̃R�����g�����҂��������E�E�E�B
>>396
>�������オ���đ����O��ɂ悭�J���Ă���B���ɂ͌��֏R��悤�ȗ͂�
>��ؓ���ĂȂ��̂ɁA���֏R���Ă��������͂邩�ɂ悭���ɐL�тĂ�B
���ʂƂ���>430�̐}�ɋ߂��t�H�[���������Ƃ������Ƃ��ȁH
>430�Ŏ������}��>95���̑��s�̂���ꕔ�𒊏ۉ����čl�����
�͊w�I�ɂ����Ɩ{���͂���Ȃ�Ȃ����ȁA���Ęb�B
���z�e�R�Ƃ̊֘A�͌��y���ĂȂ����A���f�����P����������
�b������������ɂ͂܂��������ށB
�ނ���A�����̃R�����g�����҂��������E�E�E�B
>>396
>�������オ���đ����O��ɂ悭�J���Ă���B���ɂ͌��֏R��悤�ȗ͂�
>��ؓ���ĂȂ��̂ɁA���֏R���Ă��������͂邩�ɂ悭���ɐL�тĂ�B
���ʂƂ���>430�̐}�ɋ߂��t�H�[���������Ƃ������Ƃ��ȁH
����H430�̐}�͂����������́H�@>>441 �܂��A�����ڂ͊m���ɂ������ˁB
�R������{�b�g�k�`����肽���̂̓��}���}�Ȃ��ǁA95���́A�H�w�Ƃ͊ۂ�����Ⴄ
�l�̂̑��铮��́A���������܂ŕ��������Ƃ��Ȃ��悤�Șb�ɂ�������n�}�����܂����B
�����ł���Ă݂Đg�̂���i��ł����悤�ȁu�e�R�̈З́v�Ƃ������̂̊��G�͓���ꂽ���̂ŁA
����͂Ȃ�Ƃ��Ă����p�������ȁA�Ƃ͎v���B���ǁA�X�T���͉��x���u���̋쓮�����ł͎g���Ȃ��v
�Ƃ������Ă�킯�ŁA���Ⴀ���̂��߂ɂ����ɗ����̂��H���Ă��ƂɂȂ��ȁB
�u�g���Ȃ��v�Ƃ������Ƃ������Ă��Ȃ�A�ǂ��������g����̂����Ă��Ƃ������Ă��Ȃ��̂��ȁH
�R������{�b�g�k�`����肽���̂̓��}���}�Ȃ��ǁA95���́A�H�w�Ƃ͊ۂ�����Ⴄ
�l�̂̑��铮��́A���������܂ŕ��������Ƃ��Ȃ��悤�Șb�ɂ�������n�}�����܂����B
�����ł���Ă݂Đg�̂���i��ł����悤�ȁu�e�R�̈З́v�Ƃ������̂̊��G�͓���ꂽ���̂ŁA
����͂Ȃ�Ƃ��Ă����p�������ȁA�Ƃ͎v���B���ǁA�X�T���͉��x���u���̋쓮�����ł͎g���Ȃ��v
�Ƃ������Ă�킯�ŁA���Ⴀ���̂��߂ɂ����ɗ����̂��H���Ă��ƂɂȂ��ȁB
�u�g���Ȃ��v�Ƃ������Ƃ������Ă��Ȃ�A�ǂ��������g����̂����Ă��Ƃ������Ă��Ȃ��̂��ȁH
443 �F���J�����������F05/02/10 19:05:12 ID:yErFiuQq
������Ȃ��sage�i�s�Ȃ́H
444 �F���J�����������F05/02/11 09:41:55 ID:0Rd9ZOvQ
�����g���[�^�[�Ȃ�Ȃ�Ƃ��Ȃ����ȁH
445 �F���J�����������F05/02/11 10:11:25 ID:FH6rsvms
�����g���[�^�[? �ڍ׃L�{���k
446 �F���J�����������F05/02/11 13:31:39 ID:43lxxYOD
SSM�̓R���p�N�g�ō��g���N�A�������ɗD��ێ��͂������B
���_�͂���ւ邱�ƂƑ�^���ł��Ȃ����ƁA�d�����ƁB
���_�͂���ւ邱�ƂƑ�^���ł��Ȃ����ƁA�d�����ƁB
447 �F���J�����������F05/02/11 17:04:38 ID:0Rd9ZOvQ
����Ȃ�
448 �F���J�����������F05/02/11 17:06:02 ID:0Rd9ZOvQ
������
ttp://www-ueha.pi.titech.ac.jp/USM1.htm
ttp://www.tky.3web.ne.jp/~usrmotor/topj.html
ttp://www.maeno.mech.keio.ac.jp/Maeno/utechno.pdf
ttp://www-ueha.pi.titech.ac.jp/USM1.htm
ttp://www.tky.3web.ne.jp/~usrmotor/topj.html
ttp://www.maeno.mech.keio.ac.jp/Maeno/utechno.pdf
449 �F���J�����������F05/02/12 09:14:39 ID:Snfrc3ue
�ʔ����ȁA���̃X���B
���߂Ă��̃X���ǂ��ǁA��邩��ꐇ�������ɓǂ�ł��܂����B
���߂Ă��̃X���ǂ��ǁA��邩��ꐇ�������ɓǂ�ł��܂����B
450 �F���J�����������F05/02/12 22:23:46 ID:K/eNP6RW
>>449 ���������Ȃ�ł��L��ɂȂ��Ă��܂��Ă邩��A�Q�����ĂˁB
451 �F���J�����������F05/02/12 23:23:17 ID:XMHtaSMW
�����g���[�^�[�@�����hp���������B
ttp://www.tuat.ac.jp/~toyama/study/motor/usm.html
�������g���ΐl�̂̊߂̋@�B�ɂ��Č������ł͂Ȃ��H�H
ttp://www.tuat.ac.jp/~toyama/study/motor/usm.html
�������g���ΐl�̂̊߂̋@�B�ɂ��Č������ł͂Ȃ��H�H
452 �F���J�����������F05/02/12 23:34:49 ID:XMHtaSMW
������͐l�H�ؓ��B
ttp://www.optic.or.jp/micro/info/16_itaku_kenkyu/OSS_13.pdf
ttp://www.optic.or.jp/micro/info/16_itaku_kenkyu/OSS_12.pdf
�����̋Z�p�����Č�������@�ւ��Ė����̂��ȁH
ttp://www.optic.or.jp/micro/info/16_itaku_kenkyu/OSS_13.pdf
ttp://www.optic.or.jp/micro/info/16_itaku_kenkyu/OSS_12.pdf
�����̋Z�p�����Č�������@�ւ��Ė����̂��ȁH
453 �F���J�����������F05/02/12 23:53:29 ID:K/eNP6RW
�����g���[�^�[�̉��p�̋ɂ߂����Ċ������ˁB�l�̂̊߂̃T�|�[�g�̂��߂ɊJ��
����Ă���Ƃ�������̂ł́H
�������A�l�Ԃ̕G�́A���H400�`500�s���͂��v��H�@����͓��쎟��Ō��点���肵�Ȃ�
�̂��ȁH�@
����Ă���Ƃ�������̂ł́H
�������A�l�Ԃ̕G�́A���H400�`500�s���͂��v��H�@����͓��쎟��Ō��点���肵�Ȃ�
�̂��ȁH�@
454 �F���J�����������F05/02/17 01:54:08 ID:+mBdXS6F
�����g���[�^�[�̓J�����̃����Y�ɕ��ʂɎg���Ă����
���g���N�ŐÂ��������X����
���g���N�ŐÂ��������X����
455 �F���J�����������F05/03/08 11:57:05 ID:G54ff2bA
agetoko
456 �F�����K�ꁕ����m���F05/03/09 01:20:42 ID:e03tOQir
�b�r�A���e�i�ła�r����܂����H
457 �F���J�����������F05/03/17 19:45:22 ID:8c0paN+y
���͍��A���{�����Ƃ����Q�����{�b�g���키���ƂɁA�����ɋ����������Ă��܂�.
�������A���̓p�\�R����A���{�b�g�̂��Ƃɂ��Ă܂�Œm��������܂���.�ł��A
���̓e���r�Ō������̋�����Y����܂���.�����ǂ�������,�ӌ������Ă���
�������Ǝv���܂�.���̖��\�Ȏ��ɁE�E�E
�������A���̓p�\�R����A���{�b�g�̂��Ƃɂ��Ă܂�Œm��������܂���.�ł��A
���̓e���r�Ō������̋�����Y����܂���.�����ǂ�������,�ӌ������Ă���
�������Ǝv���܂�.���̖��\�Ȏ��ɁE�E�E
458 �F���J�����������F05/03/18 06:32:20 ID:PCHs6Zo6
�@ �@�@�@�@�@�@�@�@�@�@�@ �@ �@�@�@�@�@�@ �@�@�@��-�\�\�\�[-�\�\�\�\�\�\�[
�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@�@|���O��`���܂���`�`�@�[�P
�@�@�@�@�@�@�@�@�@ �@ �@�@ �@�@�@�@�@�@ �@�@�@�@��\-�\�\�\�]�]�\�\�\�[�[�P�@�@�@
�@�@�@�@�@�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �^�@ �_�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@ �@ �@ �@�@�@�@ �@�@ �@ �i�P�P�P�j �@ �@ �@
�@ �@ �@ �@ �@�@ �@ �@ �@ �� �@�@�@�@�@�@ �i[[[[[[|]]]]]�j �@ �@ ,��
�@�@�@�@�@�@�@�@�@�@�@�@<��>�@ �@ �@ �@ [=|=|=|=|=|=]�@�@�@<��>
�@�@�@�@�@�@�@�@�@�@�@�^�܁_ �@ �@ �@ _|i�i|i�ii�i|i�|_�� �^�܁__
�@�@�@�@�@�@�@�@�@�@�@�n�M�M�m-��-��|ll||llll||lll��||lll��|lll|�P|]�M�M[_|
�@�@�@�@�@�@�@�@�@�@�@|_�^�__|,,|�u|,,,|�u|�^!�|]|[|]|[|][]|_.�c | ��_ �@]
�@�@�@�@�@�@�@�@�@�@�@| . ���@ |'|�u|'''|�u|||:ll;|||}{|||}{|||}{|||}{|,�c�c.|__|
�@�@�@�@�@�@�@�@�@�@�@|�P�P�P�P|�u|�P�P||[[|����|]]|[_[_[_[_[_[
�@�@�@�@�@�@�@�@�@�@�^i~~i' l ����l�@.���@���@���@ l�@�@|__| .| .��|�@.|�@l-,
�@�@�@�@�@�@�@,,,,,='~|�@|�@|' |,,=i~~i==========|~~|^^|~ ~'i----i==i,, | 'i
�@�@ �@ �@ �@ |�@l ,==,-'''^^�@ l�@ |. ��. ��. ��. |�@ |��| �@ |����|�@ |~~^i~'i�A
�@�@�@�@�@ ,=i^~~.|�@ |.��.�� |,...,|__|,,|__|,,|__|,,|__|,....,||,,|.|,.....,||,|_|,|.|,....,| �@ |�@|~i
�@�@�@�@ l~| .|�@�@|�@,,,---== �RɁ@�@�@ i�@�@�@�@�R�~~~ �RɁ@�@ ~ �\^=-.i,,,,|,,,|
�@�@�@�@.|..l�@i,-=''~~--,,,�@�@�_�@ �_�@ l�@�@�@�^�@�@�@�^�@�@�@�@�^�@�@__,-=^~
�@�@�@�@|,-''~�@-,,,�Q�@�@~-,,.�@ �_ .�_ |�@.�^�@�@ �^�@�@�Q,,,-~�@ �@�^
�@�@�@�@ ~^''=�A�Q _ ^'- i=''''''^~~~~~~~~~~~~~~~~~~~~^''''''''=i -'^~
�@�@�@�@�@�@�@�@�@�@ ~^^''�R�@�R �@i�@�@ | �@ �� �@i �@/�@ �^�@ �m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�R�@�@�A l�@ |�@ ���@ l�@/ .�^�@�@�^
�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �__�@�Ai �R�@ i�@ /�@�@�@,,=='
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ''==,,,,�Q�Q�Q,,,=='~
�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@�@|���O��`���܂���`�`�@�[�P
�@�@�@�@�@�@�@�@�@ �@ �@�@ �@�@�@�@�@�@ �@�@�@�@��\-�\�\�\�]�]�\�\�\�[�[�P�@�@�@
�@�@�@�@�@�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �^�@ �_�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@ �@ �@ �@�@�@�@ �@�@ �@ �i�P�P�P�j �@ �@ �@
�@ �@ �@ �@ �@�@ �@ �@ �@ �� �@�@�@�@�@�@ �i[[[[[[|]]]]]�j �@ �@ ,��
�@�@�@�@�@�@�@�@�@�@�@�@<��>�@ �@ �@ �@ [=|=|=|=|=|=]�@�@�@<��>
�@�@�@�@�@�@�@�@�@�@�@�^�܁_ �@ �@ �@ _|i�i|i�ii�i|i�|_�� �^�܁__
�@�@�@�@�@�@�@�@�@�@�@�n�M�M�m-��-��|ll||llll||lll��||lll��|lll|�P|]�M�M[_|
�@�@�@�@�@�@�@�@�@�@�@|_�^�__|,,|�u|,,,|�u|�^!�|]|[|]|[|][]|_.�c | ��_ �@]
�@�@�@�@�@�@�@�@�@�@�@| . ���@ |'|�u|'''|�u|||:ll;|||}{|||}{|||}{|||}{|,�c�c.|__|
�@�@�@�@�@�@�@�@�@�@�@|�P�P�P�P|�u|�P�P||[[|����|]]|[_[_[_[_[_[
�@�@�@�@�@�@�@�@�@�@�^i~~i' l ����l�@.���@���@���@ l�@�@|__| .| .��|�@.|�@l-,
�@�@�@�@�@�@�@,,,,,='~|�@|�@|' |,,=i~~i==========|~~|^^|~ ~'i----i==i,, | 'i
�@�@ �@ �@ �@ |�@l ,==,-'''^^�@ l�@ |. ��. ��. ��. |�@ |��| �@ |����|�@ |~~^i~'i�A
�@�@�@�@�@ ,=i^~~.|�@ |.��.�� |,...,|__|,,|__|,,|__|,,|__|,....,||,,|.|,.....,||,|_|,|.|,....,| �@ |�@|~i
�@�@�@�@ l~| .|�@�@|�@,,,---== �RɁ@�@�@ i�@�@�@�@�R�~~~ �RɁ@�@ ~ �\^=-.i,,,,|,,,|
�@�@�@�@.|..l�@i,-=''~~--,,,�@�@�_�@ �_�@ l�@�@�@�^�@�@�@�^�@�@�@�@�^�@�@__,-=^~
�@�@�@�@|,-''~�@-,,,�Q�@�@~-,,.�@ �_ .�_ |�@.�^�@�@ �^�@�@�Q,,,-~�@ �@�^
�@�@�@�@ ~^''=�A�Q _ ^'- i=''''''^~~~~~~~~~~~~~~~~~~~~^''''''''=i -'^~
�@�@�@�@�@�@�@�@�@�@ ~^^''�R�@�R �@i�@�@ | �@ �� �@i �@/�@ �^�@ �m
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�R�@�@�A l�@ |�@ ���@ l�@/ .�^�@�@�^
�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �__�@�Ai �R�@ i�@ /�@�@�@,,=='
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ''==,,,,�Q�Q�Q,,,=='~
459 �F���J�����������F05/03/18 17:15:59 ID:PCHs6Zo6
460 �F���J�����������F2005/03/22(��) 10:20:12 ID:9WweCRTB
����ROBO-ONE��
�͂��߃��{�b�g�ƃ_�C�i�}�C�U�[��
�������ˁB�J����l����Ƃ����[�Ƃ������A
���������@�ւ͉�����Ă���̂�
���ꎞ�Ԓ��₢�l�߂����B
�͂��߃��{�b�g�ƃ_�C�i�}�C�U�[��
�������ˁB�J����l����Ƃ����[�Ƃ������A
���������@�ւ͉�����Ă���̂�
���ꎞ�Ԓ��₢�l�߂����B
461 �F���J�����������F2005/04/02(�y) 16:58:47 ID:wGjxp7M8
http://www.ai.mit.edu/projects/leglab/robots/3D_biped/3D_biped.html
������Ċ��o�����������H�����Ă��ˁB
������Ċ��o�����������H�����Ă��ˁB
462 �F���J�����������F2005/04/21(��) 14:02:56 ID:Gm7hSQb2
���͑��郍�{�b�g�����u���f�������v���o���郍�{�b�g�����Ă݂����B
���s���Č����Ă��A����ȂW�O��X�O���炢�̃o�o�@�݂����ȕ��������Ⴀ�ˁB
���郍�{�b�g�ł��A�o�o�@������J�b�R�E�ɂ����ƂȂ��Ȃ��H�H
���s���Č����Ă��A����ȂW�O��X�O���炢�̃o�o�@�݂����ȕ��������Ⴀ�ˁB
���郍�{�b�g�ł��A�o�o�@������J�b�R�E�ɂ����ƂȂ��Ȃ��H�H
463 �F���J�����������F2005/04/21(��) 14:10:00 ID:fO5WrARm
>>462
�N���C�m�Ō������Ă݂�
�N���C�m�Ō������Ă݂�
464 �F���J�����������F2005/04/21(��) 18:17:34 ID:futld+tj
20Km/h�Ńo�����X����鎩�]�Ԃ͊ȒP�ɍ��邪�A1km/���ő���͓̂���̂�B
465 �F���J�����������F2005/04/21(��) 18:26:17 ID:b+Q6Cs+H
���Ă̓L���X�g���̊W�œ��s�ɂ͏��ɓI�ƌ����\�����邪�ǂ��Ȃ�
466 �F���J���������ƃ��{�b�g�����������ɍL����F2005/04/21(��) 19:36:35 ID:tjWrJChd
QRIO��ASIMO���đ���ł���
467 �F���J�����������F2005/04/21(��) 23:10:08 ID:voXVYPTa
>>460
���E��^�@�͕��ނ̋��x������Ȃ��̂�E�E�E
���ނ̋��x������Ă���\�����ނ̋��x������Ȃ��̂�E�E�E
�Ђ��݂Ő�����t�^���w�̌덷���n���ɂȂ�Ȃ��̂�E�E�E�E�E�E
���[�^�[�̏o�͂�����Ȃ��̂�E�E�E�E�E
�킩���Ă�E�E�E�E
�Ƌ����Ă݂�B
���E��^�@�͕��ނ̋��x������Ȃ��̂�E�E�E
���ނ̋��x������Ă���\�����ނ̋��x������Ȃ��̂�E�E�E
�Ђ��݂Ő�����t�^���w�̌덷���n���ɂȂ�Ȃ��̂�E�E�E�E�E�E
���[�^�[�̏o�͂�����Ȃ��̂�E�E�E�E�E
�킩���Ă�E�E�E�E
�Ƌ����Ă݂�B
468 �F���J�����������F2005/04/23(�y) 22:38:23 ID:N3dhLbL+
469 �F���J�����������F2005/04/28(��) 06:10:15 ID:vOeQXlUG
470 �F���J�����������F2005/04/28(��) 11:48:21 ID:Rg5fQiRX
>�M�������������Ղ��Ȃ���
>���[�^�[�����������M�����Ȃ���
�T�[�{�ł��ɂ߂ē��R�����A��肠��̂��H
������\�Z�l�����B
����Ƃ������\�Z�ŃM�����Ղ��������[�^�ߔM��}����A�C�f�A�ł������Ă���̂��ˁH
���n���ɂ����U�肵�Ă��A�A���ČN���n���Ɍ������
>���[�^�[�����������M�����Ȃ���
�T�[�{�ł��ɂ߂ē��R�����A��肠��̂��H
������\�Z�l�����B
����Ƃ������\�Z�ŃM�����Ղ��������[�^�ߔM��}����A�C�f�A�ł������Ă���̂��ˁH
���n���ɂ����U�肵�Ă��A�A���ČN���n���Ɍ������
471 �F���J�����������F2005/04/28(��) 20:34:23 ID:vOeQXlUG
>����Ƃ������\�Z�ŃM�����Ղ��������[�^�ߔM��}����A�C�f�A�ł������Ă���̂��ˁH
�\�Z�͂����炾��H
���̗\�Z�ʼn����A�����[�g�����点�邱�Ƃ��o����̂������Ă����B
�b�͂��ꂩ�炾��B�V��B
�\�Z�͂����炾��H
���̗\�Z�ʼn����A�����[�g�����点�邱�Ƃ��o����̂������Ă����B
�b�͂��ꂩ�炾��B�V��B
472 �F���J�����������F2005/04/28(��) 22:02:54 ID:Dy2GnR/M
�͂��߃��{�b�g�͔��l���V�O�����炢�������Ȃ̂ŕ��i�͂T�O�����炢����Ȃ��H
�ŁA���{�����̗\�I�f�����X�g���[�V�����͂Q���Ԃ����R�O�b���炢����Ώ\�����낤����R�O�b�A�����s
�������A�c��̂P���R�O�b�͕��s������̂Ƃ���
�Q���[�g�����U�b�ő���炵�����炮�邮��܂��Ȃ��炻���ړ��P�O���[�g��
���ꂪ�Œ�C�����낤�B
���邾���Ȃ狗���͂R�O���[�g���A�����s���ł��邮�炢�̂��̂ɂȂ��Ă邾�낤
�T�����ł��������Ă��̂��`���R�`���R�Ƒ���}�N���Ă��B
�Ђ���Ƃ����炠��܂�M���͖��Ղ��ĂȂ������m���B
�����A�b�������߂Ă��ꂽ�܂��B
�ŁA���{�����̗\�I�f�����X�g���[�V�����͂Q���Ԃ����R�O�b���炢����Ώ\�����낤����R�O�b�A�����s
�������A�c��̂P���R�O�b�͕��s������̂Ƃ���
�Q���[�g�����U�b�ő���炵�����炮�邮��܂��Ȃ��炻���ړ��P�O���[�g��
���ꂪ�Œ�C�����낤�B
���邾���Ȃ狗���͂R�O���[�g���A�����s���ł��邮�炢�̂��̂ɂȂ��Ă邾�낤
�T�����ł��������Ă��̂��`���R�`���R�Ƒ���}�N���Ă��B
�Ђ���Ƃ����炠��܂�M���͖��Ղ��ĂȂ������m���B
�����A�b�������߂Ă��ꂽ�܂��B
473 �F���J�����������F2005/04/28(��) 22:33:28 ID:VkzsWEU8
���������@�ւȂ�Ă�������܂���
474 �F���J�����������F2005/04/29(��) 18:48:47 ID:B+xSI1T6
475 �F���J�����������F2005/05/02(��) 12:57:27 ID:rsbmkh9i
���������@��
476 �F���J�����������F2005/05/04(��) 00:39:10 ID:LjeZn6Ri
�������点�����饥����܂��̓A�z�ȑ̈狳�t���H
477 �F�n����g�F2005/05/04(��) 22:27:34 ID:gyLyndS9
�@�������A�O�Ƀj���[�X�Ō������Ǔd�C�h����������ƕό`������������邻�����B�l�Ԃ̋ؓ��݂����Ȋ����������B
�@���[�^�[�ɂ�����炸���������V�f�ނ����p���Ă݂�Ό��\�i������Ǝv�����B
�@���[�^�[�ɂ�����炸���������V�f�ނ����p���Ă݂�Ό��\�i������Ǝv�����B
478 �F���J�����������F2005/05/04(��) 23:46:53 ID:V0iYNMYm
���̑f�ނ����[�^���
�E���ʏo�͔�ɗD��Ă�
�E�������ǂ���
�E������`���������Ȃ�
�Ȃ�ȁB
�c�O�Ȃ��猻��̃\���͂���ȃh���[���f�ނł͂Ȃ�
�E���ʏo�͔�ɗD��Ă�
�E�������ǂ���
�E������`���������Ȃ�
�Ȃ�ȁB
�c�O�Ȃ��猻��̃\���͂���ȃh���[���f�ނł͂Ȃ�
479 �F���J�����������F2005/05/28(�y) 13:21:45 ID:j5Ce6cxP
�Ȃ�ق�
480 �F���J�����������F2005/06/10(��) 11:16:00 ID:cIGNwkZo
�@�@�B�͐l�Ԃ��͎���
�@�@�B�͐l�Ԃ�葬��
�@���ꂪ�펯���Ǝv���Ă����̂ł����A
�@���{�b�g�͐l�Ԃ�葬������܂���
�@�Ȃ��ł����H
�@�V���E�g�̑f�p�ȋ^��ɓ����Ă��������܂��H
�@�@�B�͐l�Ԃ�葬��
�@���ꂪ�펯���Ǝv���Ă����̂ł����A
�@���{�b�g�͐l�Ԃ�葬������܂���
�@�Ȃ��ł����H
�@�V���E�g�̑f�p�ȋ^��ɓ����Ă��������܂��H
481 �F���J�����������F2005/06/10(��) 11:18:51 ID:H4n8DDJG
���⑬�����邾���Ȃ�ł��܂���B
���������̂Ƒ���̂Ƃ𗼗�������̂���������B
���������̂Ƒ���̂Ƃ𗼗�������̂���������B
482 �F���J�����������F2005/06/14(��) 02:12:48 ID:229qviNB
�����Ă�����Ȃ܂�
�_���ł킩��Ȃ��Ƃ��낪�����łB
�p��̘_���Ȃ�ł����B
�_���ł킩��Ȃ��Ƃ��낪�����łB
�p��̘_���Ȃ�ł����B
483 �F���J�����������F2005/06/14(��) 02:18:41 ID:0xFQK/op
�ȂႢ�B���̃X���Ɋ֘A������e���낤��
484 �F���J�����������F2005/06/14(��) 02:21:10 ID:229qviNB
�������łB
���Ă��炦�܂����H
���Ă��炦�܂����H
485 �F���J�����������F2005/06/14(��) 02:25:34 ID:0xFQK/op
������ƂȂ�
486 �F�Y�߂�q�r�F2005/06/14(��) 02:26:30 ID:229qviNB
ttp://www.informatics.sussex.ac.uk/users/ezequiel/evaughan_alife9.pdf
����łB
���e�I�ɂ͓��s���{�b�g�̃V�~�����[�V�����Ȃ�ł����B
����̂����܂��ȓ��e�͂킩���ł����A
�j���[�����l�b�g���[�N���ǂ̂悤�Ɏg�����A
���[�^�[�A�Z���T�[�A���ꂼ��̊W���킩��Ȃ����������B
�i��̓I�ɂ��̃}�V�����ڂɕ����Ȃ������ł��j
����łB
���e�I�ɂ͓��s���{�b�g�̃V�~�����[�V�����Ȃ�ł����B
����̂����܂��ȓ��e�͂킩���ł����A
�j���[�����l�b�g���[�N���ǂ̂悤�Ɏg�����A
���[�^�[�A�Z���T�[�A���ꂼ��̊W���킩��Ȃ����������B
�i��̓I�ɂ��̃}�V�����ڂɕ����Ȃ������ł��j
487 �F�Y�߂�q�r�F2005/06/14(��) 02:28:13 ID:229qviNB
�܂����킩��ɂȂ��Ă��l�b�g��łǂ�����ċ����Ă��炤�̂������ł����E�E�E
488 �F���J�����������F2005/06/14(��) 02:30:56 ID:0xFQK/op
�}�S�Ɛ}�U�݂������ő�̂킩�肻���Ȃ���
489 �F�q�r�F2005/06/14(��) 02:34:51 ID:229qviNB
�������̂��ۂ������ˁB
���̘_����ǂޑO�Ƀj���[�����l�b�g���[�N��������ق��������̂��ȁA
�ƍ��v���܂����B
�ꉞ�͂킩���Ă��ł����A�u���������v�킩���Ă���Ċ����Ȃ�ŁB�B�B
���́i�P�j�����d�v�ȈӖ������Ă����Ȉ��������ł����B�B
���̘_����ǂޑO�Ƀj���[�����l�b�g���[�N��������ق��������̂��ȁA
�ƍ��v���܂����B
�ꉞ�͂킩���Ă��ł����A�u���������v�킩���Ă���Ċ����Ȃ�ŁB�B�B
���́i�P�j�����d�v�ȈӖ������Ă����Ȉ��������ł����B�B
490 �F���ア�q�r�F2005/06/14(��) 02:38:17 ID:229qviNB
�A�N�`���G�[�^�[���Ă���ς蕁�ʂɍl�����烂�[�^�[�ł���ˁH
���̃}�V���ɂ́A�A�N�`���G�[�^�[�ƁA�_���p/�X�v�����O�A
���ƁA�ψʂ����o����Z���T�[�����Ă���Ă��Ƃł����ˁH
�����Ȃ茩�Ă�����Ď��₵�܂���ł����E�E�E
���̃}�V���ɂ́A�A�N�`���G�[�^�[�ƁA�_���p/�X�v�����O�A
���ƁA�ψʂ����o����Z���T�[�����Ă���Ă��Ƃł����ˁH
�����Ȃ茩�Ă�����Ď��₵�܂���ł����E�E�E
491 �F���J�����������F2005/06/14(��) 02:40:49 ID:0xFQK/op
�}�U�̗̋ʂ��ꂼ�ꂪ��(1)�ɏ]���ē��삵�Ă�����Ă��Ƃ��낤
�}6�̉E�[���Z���T���A���[���A�N�`���G�[�^�Ɍq�����Ă�B
�A�N�`���G�[�^���Ԃ͂͒����̂��̂Ƀo�l�_���p�n������Ɍq�������\���ɂȂ��Ă���
���̃s�b�`�E���[���ƕG�̃s�b�`�A����̃s�b�`�ƃ��[�����F�̂悤�Ȏ��t�����Ōq�����Ă���
�}�U�̏�[��CPG�͒����Ɉ����A���E���ꂼ��̐}6�̃l�b�g���[�N�Ɍq�����Ă���B
�Ƃ���Ȋ����W���}�C�J
�}6�̉E�[���Z���T���A���[���A�N�`���G�[�^�Ɍq�����Ă�B
�A�N�`���G�[�^���Ԃ͂͒����̂��̂Ƀo�l�_���p�n������Ɍq�������\���ɂȂ��Ă���
���̃s�b�`�E���[���ƕG�̃s�b�`�A����̃s�b�`�ƃ��[�����F�̂悤�Ȏ��t�����Ōq�����Ă���
�}�U�̏�[��CPG�͒����Ɉ����A���E���ꂼ��̐}6�̃l�b�g���[�N�Ɍq�����Ă���B
�Ƃ���Ȋ����W���}�C�J
492 �F���J�����������F2005/06/14(��) 02:46:12 ID:0xFQK/op
�Z���T�Ɋւ��Ă��}�U�̃L���v�V�����ɑ�̏����Ă��邪
�w�`�F�w������̊p�x
XF�FX���܂��̗�
rotX:���̂̂w���܂��̊p���x
accelX:���̂�X�������̉����x
���Ċ��������Ȃ�����
�w�`�F�w������̊p�x
XF�FX���܂��̗�
rotX:���̂̂w���܂��̊p���x
accelX:���̂�X�������̉����x
���Ċ��������Ȃ�����
493 �F���J�����������F2005/06/14(��) 02:49:02 ID:0xFQK/op
�A�N�`���G�[�^�̓��[�^�[���g���������̂��̂Ƀo�l�_���p�v�f��Ȃ�
�������̂̂悤�����A�ڍׂ͎Q�l���������ق����悳�������B
����ŃA�N�`���G�[�^���̂̏�Ԃ�NN�ɖ߂����[�͂Ȃ�������
�M���ł���I�[�v�����[�v�n�����ʃT�[�{�n���Ȃ����
�������̂̂悤�����A�ڍׂ͎Q�l���������ق����悳�������B
����ŃA�N�`���G�[�^���̂̏�Ԃ�NN�ɖ߂����[�͂Ȃ�������
�M���ł���I�[�v�����[�v�n�����ʃT�[�{�n���Ȃ����
494 �F���ア�q�r�F2005/06/14(��) 02:51:07 ID:229qviNB
���茳�ɂ͈�������������Ȃ���ŐF�͂킩��Ȃ���ł����A
�̋ʂ͂����炭�A�}�E�̊ۂ��������ꂼ��̑f�q���ۂ������ˁB
�搶�������Ă͂�A
�u�A�N�`���G�[�^���Ԃ͂͒����̂��̂Ƀo�l�_���p�n������Ɍq�������\����
�Ȃ��Ă��āv���Ă����̂̓A�N�`���G�[�^�[�Ƃ˃_���p�n��
�Ȃ����Ă�\�����Ă��Ƃł���ˁH���̂˃_���p�n�ɕψʊϑ�
�Z���T�[���Ȃ����Ă�ȁ`�B�������ł͂����l�����̂ł����A
�������ł��傤���H
�Ƃ肠�����A���i�P�j�ɂ��Ă͂��������ڂ������Ă݂܂��B�B�B
��̗̂���������Ă�������̂ŁB�ς��ƌ��Ă킩����Ă����������ȁI�I
�̋ʂ͂����炭�A�}�E�̊ۂ��������ꂼ��̑f�q���ۂ������ˁB
�搶�������Ă͂�A
�u�A�N�`���G�[�^���Ԃ͂͒����̂��̂Ƀo�l�_���p�n������Ɍq�������\����
�Ȃ��Ă��āv���Ă����̂̓A�N�`���G�[�^�[�Ƃ˃_���p�n��
�Ȃ����Ă�\�����Ă��Ƃł���ˁH���̂˃_���p�n�ɕψʊϑ�
�Z���T�[���Ȃ����Ă�ȁ`�B�������ł͂����l�����̂ł����A
�������ł��傤���H
�Ƃ肠�����A���i�P�j�ɂ��Ă͂��������ڂ������Ă݂܂��B�B�B
��̗̂���������Ă�������̂ŁB�ς��ƌ��Ă킩����Ă����������ȁI�I
495 �F���ア�q�r�F2005/06/14(��) 02:54:48 ID:229qviNB
>>493
�Ȃ�قǁE�E�E�[���ł��I�I������������494��
���Ԃ����Ⴂ�܂����ˁB����܂���B
���Ȃ�ڂ��������Ȃ�ł��ˁB
�u�I�[�v�����[�v�n�v�A�u���ʃT�[�{�n�v
����ɂ��Ă����ƒ��ׂĂ݂܂��B
�Ȃ��킩�肻���ȋC�����Ă��܂����B�i�E�́E�j/
�Ȃ�قǁE�E�E�[���ł��I�I������������494��
���Ԃ����Ⴂ�܂����ˁB����܂���B
���Ȃ�ڂ��������Ȃ�ł��ˁB
�u�I�[�v�����[�v�n�v�A�u���ʃT�[�{�n�v
����ɂ��Ă����ƒ��ׂĂ݂܂��B
�Ȃ��킩�肻���ȋC�����Ă��܂����B�i�E�́E�j/
496 �F���J�����������F2005/06/14(��) 02:58:52 ID:0xFQK/op
�ߊp�x�͉�]�ߎ��̂̊p�x�v���ۂ���
�̓Z���T�́u�A�N�`���G�[�^�̃o�l�v�f�̒����v�������l�H�v�Ƃ������Ă����
�A�N�`���G�[�^���̂̕ψكZ���T�Ɋւ��錾�y�݂͂������̂�>493
�̓Z���T�́u�A�N�`���G�[�^�̃o�l�v�f�̒����v�������l�H�v�Ƃ������Ă����
�A�N�`���G�[�^���̂̕ψكZ���T�Ɋւ��錾�y�݂͂������̂�>493
497 �F���J�����������F2005/06/14(��) 03:00:42 ID:0xFQK/op
�Ă��Ƃ�₭������
1)�u�I�[�v�����[�v�n�v�F�w�߂��o���Ƃق��Ƃ��Ă��m���ɂ��̂Ƃ���ɓ������J
2)�u���ʃT�[�{�n�v�����Ɏ��O�̃t�B�[�h�o�b�N���[�v�������Ă��ĊO���猩���(1)�̂悤�ɓ���������
���炢�̈Ӗ��ŏ����Ă݂�
1)�u�I�[�v�����[�v�n�v�F�w�߂��o���Ƃق��Ƃ��Ă��m���ɂ��̂Ƃ���ɓ������J
2)�u���ʃT�[�{�n�v�����Ɏ��O�̃t�B�[�h�o�b�N���[�v�������Ă��ĊO���猩���(1)�̂悤�ɓ���������
���炢�̈Ӗ��ŏ����Ă݂�
498 �F���ア�q�r�F2005/06/14(��) 03:05:24 ID:229qviNB
>>496
�����[�I����Ȃ����ɂ킩��Ȃ�Ă������[�[�I�I
�܂����\�܂łɎ��Ԃ�����̂Ő}�U�A�}�S�ɂ��Ă�
�����̌��t�Ő����ł���܂ł���������Ɠǂݍ���ł݂܂��I
���q�ɂ̂��Ă��ƈ����Ȃ�ł����A
�}13�ŃX�g���C�h�����X�i���������j�����ꂼ��̕����ɂ����
�Ⴄ�̂́A�Ȃ��ł��傤���H
�ꉞ�A�{���i�}�̐������j�ɂ�CPG�p���X�̋�����
�������������i�H�j���Ă�����Ă����ӂ��ɏ����Ă������̂ł����B
�����ꂪ�Ȃ�ł��킩��Ȃ���ł��B
�����[�I����Ȃ����ɂ킩��Ȃ�Ă������[�[�I�I
�܂����\�܂łɎ��Ԃ�����̂Ő}�U�A�}�S�ɂ��Ă�
�����̌��t�Ő����ł���܂ł���������Ɠǂݍ���ł݂܂��I
���q�ɂ̂��Ă��ƈ����Ȃ�ł����A
�}13�ŃX�g���C�h�����X�i���������j�����ꂼ��̕����ɂ����
�Ⴄ�̂́A�Ȃ��ł��傤���H
�ꉞ�A�{���i�}�̐������j�ɂ�CPG�p���X�̋�����
�������������i�H�j���Ă�����Ă����ӂ��ɏ����Ă������̂ł����B
�����ꂪ�Ȃ�ł��킩��Ȃ���ł��B
499 �F���ア�q�r�F2005/06/14(��) 03:09:08 ID:229qviNB
>>497
�Ȃ�قǁE�E�E
�Ȃ�قǁE�E�E
500 �F���ア�q�r�F2005/06/14(��) 03:15:19 ID:229qviNB
>>498�ɂ��Ăł����B�B�B
�����I�ɂ�CPG�p���X���o���āA����ɔ�Ⴗ�銴���ŕ���������
���܂���Ċ������Ȃ��Ďv������ł����A
���႟���x�́u�Ȃ�CPG�p���X�����ɏo���Ȃ��̂��낤�E�E�E�v�Ƃ�
�v������B�B�B���̂������I�O��Ȃ��ƌ����Ă邩������܂��B
�����I�ɂ�CPG�p���X���o���āA����ɔ�Ⴗ�銴���ŕ���������
���܂���Ċ������Ȃ��Ďv������ł����A
���႟���x�́u�Ȃ�CPG�p���X�����ɏo���Ȃ��̂��낤�E�E�E�v�Ƃ�
�v������B�B�B���̂������I�O��Ȃ��ƌ����Ă邩������܂��B
501 �F���J�����������F2005/06/14(��) 03:19:00 ID:0xFQK/op
����͏������ς�����Ƃ��ɂ�����w�K������Ε������傫���Ȃ��Ă��ˁH
502 �F���ア�q�r�F2005/06/14(��) 03:22:27 ID:229qviNB
����������i������������j����A
CPG���������Ȃ����B���Ă��Ƃł����H
�������͋t���ȁH
CPG���������Ȃ����B���Ă��Ƃł����H
�������͋t���ȁH
503 �F���J�����������F2005/06/14(��) 03:27:15 ID:0xFQK/op
���̏ꍇ�́u�������ς��v�Ă̂̓��{�b�g�̑̊i����
�}�P�P�Q��
�}�P�P�Q��
504 �F���ア�q�r�F2005/06/14(��) 03:32:25 ID:229qviNB
>>503
�Ȃ�قǁI�{�̂̍\����̃m�C�Y�����ˁB
�����������ꂪ�킩���Ă��܂����I�I
���Ƃ́A�����̌��t�Ŕ��\�ł���悤�Ɍ��Ă݂܂���I
���肪�Ƃ��������܂��B���i�Q�Q�j��
���Ȃ݂ɋ������Ȃ̕��ł����H
�Ȃ�قǁI�{�̂̍\����̃m�C�Y�����ˁB
�����������ꂪ�킩���Ă��܂����I�I
���Ƃ́A�����̌��t�Ŕ��\�ł���悤�Ɍ��Ă݂܂���I
���肪�Ƃ��������܂��B���i�Q�Q�j��
���Ȃ݂ɋ������Ȃ̕��ł����H
505 �F���J�����������F2005/06/14(��) 03:33:25 ID:0xFQK/op
�����̗����̃��b�T�[�p���_���B�C�ɂ���ȁB�����B
506 �F���ア�q�r�F2005/06/14(��) 03:35:57 ID:229qviNB
��A���b�T�[�ł������
�ł́A���炵�܁[���B�i��ͥ�j/
�ł́A���炵�܁[���B�i��ͥ�j/
507 �F���J�����������F2005/06/16(��) 11:29:57 ID:bSLrBkYd
508 �F���J�����������F2005/06/16(��) 13:34:07 ID:zlD+goW8
>507
���_�Ǝ���MIT��3D-Biped�̒i�K�łł��Ă�
���Ƃ̓X�s�[�h�A�b�v����������\�Z��������Ή\�B
����45�L���̒B���ɂȂw�p�I�ȉ��l������Ȃ�Ƃ����ɂ���Ă��B
�\�Z����B
���_�Ǝ���MIT��3D-Biped�̒i�K�łł��Ă�
���Ƃ̓X�s�[�h�A�b�v����������\�Z��������Ή\�B
����45�L���̒B���ɂȂw�p�I�ȉ��l������Ȃ�Ƃ����ɂ���Ă��B
�\�Z����B
509 �F���J�����������F2005/06/16(��) 18:04:06 ID:NpLlEQSu
���������ĂȂ��Ȃ���������H
�m��KENKEN2������Ă��Ǝv�����A�v���Ԃ��
�ǂ��Ȃ��Ă邩���Ă݂悤�Ǝv������ǂ��������N��B
���k��Ɏc���Ă��̂��폜����Ă邵�A�Ȃ������H
�m��KENKEN2������Ă��Ǝv�����A�v���Ԃ��
�ǂ��Ȃ��Ă邩���Ă݂悤�Ǝv������ǂ��������N��B
���k��Ɏc���Ă��̂��폜����Ă邵�A�Ȃ������H
510 �F���J�����������F2005/06/20(��) 09:01:20 ID:zqKFfqiX
511 �F���J�����������F2005/06/20(��) 21:02:55 ID:g8eSRb84
512 �F���J�����������F2005/08/21(��) 11:22:06 ID:BTW1eJey
age
513 �F���J�����������F2005/08/23(��) 20:28:31 ID:6RBYM/Bc
���܂���A���r�̂ɂ�����āA�r���g���Ȃ��悤�ɂ��đ����Ă݂�B
�����ł����Ȃ�A�S�̈ӎu�Ō����Ȃ��悤�ɂ��Ă݂�B
�������������邩��B
�����ł����Ȃ�A�S�̈ӎu�Ō����Ȃ��悤�ɂ��Ă݂�B
�������������邩��B
514 �F���J�����������F2005/08/24(��) 20:26:31 ID:PRPlzLaY
>>513
100��14�b�ő���܂���
100��14�b�ő���܂���
515 �F���J�����������F2005/08/25(��) 22:47:15 ID:OYPA97gG
>>513
�@�@�@�@�@�@ �@�@�@�^�܁R
�@�@�@������i�@�O�ցO�j�� �u�[��
�@�@�@�@�@�@�@�@|�@�@�@ /
�@�@�@�@ �@�@�@ �i�@�R�m
�@�@�@�@�@�@�@�@ �>�m
�@�@�@�@ �O�@�@���
�@�@�@�@�@�@ �@�@�@�^�܁R
�@�@�@������i�@�O�ցO�j�� �u�[��
�@�@�@�@�@�@�@�@|�@�@�@ /
�@�@�@�@ �@�@�@ �i�@�R�m
�@�@�@�@�@�@�@�@ �>�m
�@�@�@�@ �O�@�@���
516 �F���J�����������F2005/09/09(��) 16:46:11 ID:IlbOxkg5
517 �F���������������I���ɍs�����F2005/09/10(�y) 16:58:21 ID:fzgIlhvd
���p���O���������i����
518 �F���J�����������F2005/09/13(��) 20:48:39 ID:NF8Ze2tL
�y�S�[���f�����X�z
�@�@���@�E�́E�j���� �L�́M�j���@�@���̃��X�������l�̓R�s�y�ł������̂�
�@�@ �r�@�@�@�@ _�m �r�@�@�@�@ _�m10���ȓ���3�̃X���֓\��t���Ă��������B
�@�@Ɂ@�m�@ �m�@�@Ɂ@�m�@ �m��������P�S����D���Ȑl���獐����������͓������
�@�@���L�i�Q�j�@�@ ���L�i�Q�j �o�����܂����̂̈������S�������ł��炢���ł�
�@�@���@�E�́E�j���� �L�́M�j���@�@���̃��X�������l�̓R�s�y�ł������̂�
�@�@ �r�@�@�@�@ _�m �r�@�@�@�@ _�m10���ȓ���3�̃X���֓\��t���Ă��������B
�@�@Ɂ@�m�@ �m�@�@Ɂ@�m�@ �m��������P�S����D���Ȑl���獐����������͓������
�@�@���L�i�Q�j�@�@ ���L�i�Q�j �o�����܂����̂̈������S�������ł��炢���ł�
http://www.vstone.co.jp/top/movie/robot/robovie-m/walk_2.wmv
���������ǁA��̂悩�}�V
���������ǁA��̂悩�}�V
520 �F���J�����������F2005/09/30(��) 01:10:36 ID:8RMj8Qcp
�EDVD�^��Đ�,CD, MD,DAT�iʲ96kHz�T���v�����O�Ή�),��ٶ���ð�ߘ^���Đ�
�EMDLP�Ή��AHiMD�Ή��ADVD AUDIO�Ή��ASACD�Ή��ASVCD/VCD�Ή��AD8/Hi8�Ή��A
�EDVD�}R/RW/RAM,CD-R/RW��OK�ALD�ALDSingle�A
�ESD�������Ή��ACFTYPE�U�Ή��X���b�g���ځiϲ����ײ�ޑΉ��j
�EMP3��WMA,OGG Vobis,ATRAC3PLUS��OK
�E�`�l�X�e���I����,TV�������d���ځAFM�������d����
�E�N�C�b�N���o�[�X�A�I�[�g�`�F���W���[�ACD-DVD�o���N�V�X�e������
�E�O���C�R�A�p�����g���b�N�C�R���C�U�[����
�E�v�^���f�b�L�A�v�^�Ή�1TB HDD����
�E6�����v���O�����^�C�}�[���ځA�����͓d�g���v�AEPG�ANTP�Ή�
���̏����ł����̂���܂����H
�Q�R�Ȃ�����N���A���Ȃ��Ă��n�j�ł��B�@�������Ƀ��}�_�ȊO�Ŕ��������ł��B
�EMDLP�Ή��AHiMD�Ή��ADVD AUDIO�Ή��ASACD�Ή��ASVCD/VCD�Ή��AD8/Hi8�Ή��A
�EDVD�}R/RW/RAM,CD-R/RW��OK�ALD�ALDSingle�A
�ESD�������Ή��ACFTYPE�U�Ή��X���b�g���ځiϲ����ײ�ޑΉ��j
�EMP3��WMA,OGG Vobis,ATRAC3PLUS��OK
�E�`�l�X�e���I����,TV�������d���ځAFM�������d����
�E�N�C�b�N���o�[�X�A�I�[�g�`�F���W���[�ACD-DVD�o���N�V�X�e������
�E�O���C�R�A�p�����g���b�N�C�R���C�U�[����
�E�v�^���f�b�L�A�v�^�Ή�1TB HDD����
�E6�����v���O�����^�C�}�[���ځA�����͓d�g���v�AEPG�ANTP�Ή�
���̏����ł����̂���܂����H
�Q�R�Ȃ�����N���A���Ȃ��Ă��n�j�ł��B�@�������Ƀ��}�_�ȊO�Ŕ��������ł��B
521 �F���J�����������F2005/10/01(�y) 06:31:35 ID:MPFvsPRI
522 �F���J�����������F2005/10/02(��) 15:57:05 ID:MdYSVC5y
����̂���Ƃ������Z����ĂȂ���ł����ˁB
30m�_�b�V���̃X�v�����^�[���݂����ȁB
��������Ƃ�����A���̂Q�����s���{�b�g�͂ǂꂭ�炢�̃X�s�[�h��
�����̂ł��傤��?
30m�_�b�V���̃X�v�����^�[���݂����ȁB
��������Ƃ�����A���̂Q�����s���{�b�g�͂ǂꂭ�炢�̃X�s�[�h��
�����̂ł��傤��?
523 �F���J�����������F2005/10/02(��) 17:51:13 ID:kIWsw3Tr
>>522
Robo-One Dash�ŃO�O��
����͂Q�����P�R�b���炢���������ȂƁB
�����葁�����̕��������̂ŁA�F���������Ă���B
�������Z�ƌ����������ǂ�������
Robo-One Dash�ŃO�O��
����͂Q�����P�R�b���炢���������ȂƁB
�����葁�����̕��������̂ŁA�F���������Ă���B
�������Z�ƌ����������ǂ�������
524 �F���J�����������F2005/10/03(��) 18:46:01 ID:85gu5anw
�́H
ROBO-ONE�̒��̐l����
��ʐw�̃��{�b�g��
5m������10�b��O�������B
�m�������Ԃ肷��ȁB
ROBO-ONE�̒��̐l����
��ʐw�̃��{�b�g��
5m������10�b��O�������B
�m�������Ԃ肷��ȁB
525 �F���J�����������F2005/10/03(��) 20:08:25 ID:ed84CjAy
>>1
���[���[�_�b�V���ł������낤�H
���[���[�_�b�V���ł������낤�H
526 �F���J�����������F2005/10/03(��) 23:54:36 ID:3VWcVetd
�N���[���B
���[���[�u���[�h�͉����܂łł���悤�ɂȂ����́H
���Ă��_�������ɂ��邩�����Ă���B
���[���[�u���[�h�͉����܂łł���悤�ɂȂ����́H
���Ă��_�������ɂ��邩�����Ă���B
527 �F���J�����������F2005/10/04(��) 15:50:12 ID:G8+rl5/G
>>524
>>523�ɂ́u���ȁv���ď����Ă���悤�Ɍ�������ǁB
�u�m�������Ԃ�v�Ƃ������������Ȃ��āA�\�[�X���������Ă��Ē������Ă��Ȃ�
>>522�ɑ��Đ��S���Ӊ��Ă���B
���̐l�Ȃ�Ȃ����炾���B
>>523�ɂ́u���ȁv���ď����Ă���悤�Ɍ�������ǁB
�u�m�������Ԃ�v�Ƃ������������Ȃ��āA�\�[�X���������Ă��Ē������Ă��Ȃ�
>>522�ɑ��Đ��S���Ӊ��Ă���B
���̐l�Ȃ�Ȃ����炾���B
528 �F���J�����������F2005/10/05(��) 21:17:10 ID:2/jtVOM9
���[���[�u���[�h���ĉ��������́H
529 �F���J�����������F2005/10/05(��) 21:29:14 ID:vXmrLxtr
530 �F���J�����������F2005/10/07(��) 20:34:19 ID:pg9GyVcN
>>524
���{�������Ă���̂����A���x���オ���Ă��Ă܂��ˁB
��N�O�͋����Ƃ����Ă��d�����Ȃ��Ǝv���܂����A
�ŋ߂͑����Ă�悤�Ɍ�����o���̃��{�b�g�������Ȃ�܂����ˁB
���{�������Ă���̂����A���x���オ���Ă��Ă܂��ˁB
��N�O�͋����Ƃ����Ă��d�����Ȃ��Ǝv���܂����A
�ŋ߂͑����Ă�悤�Ɍ�����o���̃��{�b�g�������Ȃ�܂����ˁB
531 �F���J�����������F2005/10/07(��) 22:14:58 ID:2EHhCH05
�ł��܂��A�����苣���̕���������ˁE�E�E
532 �F���J�����������F2005/10/22(�y) 11:51:30 ID:8P5afJX0
��������ITC���{�v���X�v�����g�������B
533 �F���J�����������F2005/12/17(�y) 21:01:06 ID:bZsO0D8U
���x��ROBO-ONE�̗\�I�́u����v�����瑖��Ȃ��Ɨ\�I�ʉ߂��o���Ȃ��ȁB
534 �F���J�����������F2005/12/19(��) 13:07:01 ID:wGeBh/OS
535 �F���J�����������F2005/12/20(��) 12:57:31 ID:s5UcJfZf
���ݍő��̃��{����2�����s���{�b�g��
1�ʃI���j�[��
2�ʂ͂��߃��{�b�g
3�ʃ_�C�i�}�C�U�[
�Ƃ������ł��ˁB
1�ʃI���j�[��
2�ʂ͂��߃��{�b�g
3�ʃ_�C�i�}�C�U�[
�Ƃ������ł��ˁB
536 �F���J�����������F2005/12/31(�y) 11:03:18 ID:K8QItoso
���̃��{�^���@������
537 �F���J�����������F2006/01/02(��) 21:06:35 ID:fi/6B0LZ
�����̌������Łu���s�v���Ă̂�����Ă����
����͎��p�I�ɂ͂ǂ��Ȃ̂�H�@�ʒu�G�l���M�[���ǂ����炩
�������Ȃ����薳���Ȃ悤�ȋC�����邪�B�Ⴆ�Βi�X���Ƃ��ł�
��Ƃ�z�肵�Ă���̂��B�P�ɗ͊w�I�ɖʔ����������Ă����
�Ȃ�킩�邪�B���`�x�[�V�������C�}�C�`�킩��Ȃ��̂��Y�݂̎�B
����͎��p�I�ɂ͂ǂ��Ȃ̂�H�@�ʒu�G�l���M�[���ǂ����炩
�������Ȃ����薳���Ȃ悤�ȋC�����邪�B�Ⴆ�Βi�X���Ƃ��ł�
��Ƃ�z�肵�Ă���̂��B�P�ɗ͊w�I�ɖʔ����������Ă����
�Ȃ�킩�邪�B���`�x�[�V�������C�}�C�`�킩��Ȃ��̂��Y�݂̎�B
538 �F���J�����������F2006/01/02(��) 23:39:22 ID:Yzmy5zuT
�ʂɒN���i�v�@�ւ���낤�Ƃ��Ă���킯�ł͂Ȃ�
��������������I�ɂ悭�Ȃ�Ƃ����i�Ƃ݂͂�Ȏv���Ă�
��������������I�ɂ悭�Ȃ�Ƃ����i�Ƃ݂͂�Ȏv���Ă�
539 �F���J�����������F2006/01/03(��) 13:50:16 ID:s/KR4s4v
>>537
���i���|�ꑱ���j��A�d�͂��ʒu�G�l���M�[���������Ă�����B
�d�͂����邩��A�l�H�q���̓G�l���M�[�����ő؋����邱�Ƃ��o����B
��������̐��i�͂Ƃ��Ă̏d�͂��r�߂��Ⴂ���Ȃ��B
�������̕��i���n�ʂɂԂ��������̔���p�Ƒ̂̃q�l��������
�p������ł���悤�ɂȂ�A�قƂ�ǃG�l���M�[������
�e�P�e�P�E�E�E�ƈړ��ł��邶��Ȃ����B
�S�g���T�[�{�쓮�A�o�b�e���[���ڂ̃��{�ł͉ғ����Ԃ��҂��Ȃ��B
�����ƌ����I�ȃA�v���[�`�Ƃ��āu���s�v�͂���ς�d�v����B
���i���|�ꑱ���j��A�d�͂��ʒu�G�l���M�[���������Ă�����B
�d�͂����邩��A�l�H�q���̓G�l���M�[�����ő؋����邱�Ƃ��o����B
��������̐��i�͂Ƃ��Ă̏d�͂��r�߂��Ⴂ���Ȃ��B
�������̕��i���n�ʂɂԂ��������̔���p�Ƒ̂̃q�l��������
�p������ł���悤�ɂȂ�A�قƂ�ǃG�l���M�[������
�e�P�e�P�E�E�E�ƈړ��ł��邶��Ȃ����B
�S�g���T�[�{�쓮�A�o�b�e���[���ڂ̃��{�ł͉ғ����Ԃ��҂��Ȃ��B
�����ƌ����I�ȃA�v���[�`�Ƃ��āu���s�v�͂���ς�d�v����B
540 �F���J�����������F2006/01/03(��) 16:46:15 ID:Km3y899s
���s�́A���R�E�������I�ɓ���̍œK�����Ă��ꂽ���s�p�^�[��������A��������
���Ă������́A�����I�ȓ���Ƃ͉������l����ɂ������Ă͂��Ȃ�d�v���Ǝv���B
���s�̓���ɁA�K�ɏR��Ȃǂʼn^���G�l���M�[���������Ă�ꂽ��ʔ����Ǝv���B
���Ă������́A�����I�ȓ���Ƃ͉������l����ɂ������Ă͂��Ȃ�d�v���Ǝv���B
���s�̓���ɁA�K�ɏR��Ȃǂʼn^���G�l���M�[���������Ă�ꂽ��ʔ����Ǝv���B
541 �F���J�����������F2006/01/04(��) 23:48:42 ID:MmwNp0BM
>>539
�Ȃ�قǁB�������A�l�H�q���ƕ��s�͈Ⴄ�C��������Ȃ��B�B�B
�܂�A539����̃R�����g����킩�������̃C���[�W��
�u�K�ɂ܂����悤�Ȑ�z�u���A�������A���܂����{�b�g�{��
�𐧌䂷��Ɓw���낤���āx���s���Ă���i�����Ă���H�j�悤��
������v�Ƃ��������B�Ⴆ�ΐl�Ԃ����Đɂ܂����āA�]�Ȃ��悤
��2�C3���O�삯�o�����Ƃ��Ă����ˁH�@
���̊��o�ł����ƁA���{�b�g�̎��R�x����Ȃ���s�̈ʑ���Ԃ̂Ȃ�
�ł܂Â��ōI�����s���p������A�g���N�^�Ȃ�Ă����̂́A
�S��Ԃ̒��̔��X���镔���ŁA���������A�g���N�^�ɕ��s���u���Ƃ��v
���Ǝ��̂��g�e�������I�ɂ͎v���Ȃ��i�����A�ȒP�Ȃ̂ł����
�S�����j�B
����539����̐����̗����͂������������ȂB
�l�H�q��������Ӗ��Łu�I�������Ă���v�킯�����ǁA�ʑ���Ԃ�
���G���Ƃ������A����̃��x�����Ⴄ��Ȃ����Ȃ��B
���ꂩ��A���s�œ���ꂽ���s�p�^�[���ʂ̕��ʏ�ł̕��s
�����̂̃A�g���N�^�Ƃ��Ė��ߍ��ނƁA���܂�������낤���H
�Ȃ�قǁB�������A�l�H�q���ƕ��s�͈Ⴄ�C��������Ȃ��B�B�B
�܂�A539����̃R�����g����킩�������̃C���[�W��
�u�K�ɂ܂����悤�Ȑ�z�u���A�������A���܂����{�b�g�{��
�𐧌䂷��Ɓw���낤���āx���s���Ă���i�����Ă���H�j�悤��
������v�Ƃ��������B�Ⴆ�ΐl�Ԃ����Đɂ܂����āA�]�Ȃ��悤
��2�C3���O�삯�o�����Ƃ��Ă����ˁH�@
���̊��o�ł����ƁA���{�b�g�̎��R�x����Ȃ���s�̈ʑ���Ԃ̂Ȃ�
�ł܂Â��ōI�����s���p������A�g���N�^�Ȃ�Ă����̂́A
�S��Ԃ̒��̔��X���镔���ŁA���������A�g���N�^�ɕ��s���u���Ƃ��v
���Ǝ��̂��g�e�������I�ɂ͎v���Ȃ��i�����A�ȒP�Ȃ̂ł����
�S�����j�B
����539����̐����̗����͂������������ȂB
�l�H�q��������Ӗ��Łu�I�������Ă���v�킯�����ǁA�ʑ���Ԃ�
���G���Ƃ������A����̃��x�����Ⴄ��Ȃ����Ȃ��B
���ꂩ��A���s�œ���ꂽ���s�p�^�[���ʂ̕��ʏ�ł̕��s
�����̂̃A�g���N�^�Ƃ��Ė��ߍ��ނƁA���܂�������낤���H
542 �F���J�����������F2006/01/09(��) 22:32:01 ID:4s5GQoyC
>>541
�l�Ԃ͂ӂ���̕��s�̈ꕔ�ł����s�����Ă���B
���̂`�r�h�l�n�݂����ɂP�O�O���p���[�ɗ��������s�����Ă�����G�l���M�[���Ղ����������Ď��p�I����Ȃ��B
�l�Ԃ͂ӂ���̕��s�̈ꕔ�ł����s�����Ă���B
���̂`�r�h�l�n�݂����ɂP�O�O���p���[�ɗ��������s�����Ă�����G�l���M�[���Ղ����������Ď��p�I����Ȃ��B
543 �F539�F2006/01/11(��) 21:37:29 ID:ZsFpYRFz
>>541
�����A�g���N�^���݂�̂Ȃ�A���{�b�g�����A���^�C���ɋ@�B�w�K���邱�Ƃ�
���������邱�Ƃ͉\���Ǝv���܂��B����͐l�H�m�\�̕���ɂȂ�܂����B
�H�̎��s�ŁA�����͂Ńo�����X�����͈̂ꌩ������Ɍ����܂����A
���W���x�G�݂����ɂ��āu�X�����d�́��X����v�Ƃ����ӂ��ɂ���Ƃ��A
�d�͂��g�������@�͂��낢�날��܂��B�܂��A�K�v�Ȏ��������W���x�G������
���ۂ̐����Ɣ�ׂ��猩���ڂ͈�����������܂��B
���͐l�Ԃ̕��s�̐���Ƃ����̂́A�{���̓V���x���J�[�̑���Ȃ��
��قNJw�K���₷���͂����Ǝv���Ă��܂��B���̃��{�b�g�́A�e�������`�ɗ\���ł��邱�Ƃ��d������
�T�[�{���𐧌䂵�Ă��܂����A���ʂƂ��đS�̂����G�ɂȂ��Ă��܂��A���p��
�����Ȃ��Ȃ��Ă��܂��Ă��܂��B
�����������@�\�����ɕ��s�ɍœK������Ă���̂Ȃ�A�����̐�����l����
�K�v�͖����Ȃ�͂��ł��B�ނ�����s�S�̂��@�B�w�K�ōœK������悢���ƂɂȂ�܂��B
�l�Ԃ����ӎ��ɕ������闝�R�͂���ł��B�{���A���s�͔��˓I�s���ŁA
�l����ׂ����Ƃ͔��ɏ��Ȃ��͂��Ȃ̂ł��B
�Ⴆ�A�n�ʂɂԂ������Ƃ��ɑ�����A�Ƃ������{�b�g������܂��B
���������ۂ̐l�Ԃ̏ꍇ�A�n�ʂɂԂ���Α���͂قƂ�Ǐ���ɉ��̂ł��B
�l�Ԃ́A�����u���܂��v���@���w��ł��邾���Ȃ̂ł��B
���̂悤�ȃ��{�b�g�́A��肭�����邾���łȂ��A�w�K�ɂ���ĉ��p���������{�b�g��
�Ȃ�ł��傤�B
�����A�g���N�^���݂�̂Ȃ�A���{�b�g�����A���^�C���ɋ@�B�w�K���邱�Ƃ�
���������邱�Ƃ͉\���Ǝv���܂��B����͐l�H�m�\�̕���ɂȂ�܂����B
�H�̎��s�ŁA�����͂Ńo�����X�����͈̂ꌩ������Ɍ����܂����A
���W���x�G�݂����ɂ��āu�X�����d�́��X����v�Ƃ����ӂ��ɂ���Ƃ��A
�d�͂��g�������@�͂��낢�날��܂��B�܂��A�K�v�Ȏ��������W���x�G������
���ۂ̐����Ɣ�ׂ��猩���ڂ͈�����������܂��B
���͐l�Ԃ̕��s�̐���Ƃ����̂́A�{���̓V���x���J�[�̑���Ȃ��
��قNJw�K���₷���͂����Ǝv���Ă��܂��B���̃��{�b�g�́A�e�������`�ɗ\���ł��邱�Ƃ��d������
�T�[�{���𐧌䂵�Ă��܂����A���ʂƂ��đS�̂����G�ɂȂ��Ă��܂��A���p��
�����Ȃ��Ȃ��Ă��܂��Ă��܂��B
�����������@�\�����ɕ��s�ɍœK������Ă���̂Ȃ�A�����̐�����l����
�K�v�͖����Ȃ�͂��ł��B�ނ�����s�S�̂��@�B�w�K�ōœK������悢���ƂɂȂ�܂��B
�l�Ԃ����ӎ��ɕ������闝�R�͂���ł��B�{���A���s�͔��˓I�s���ŁA
�l����ׂ����Ƃ͔��ɏ��Ȃ��͂��Ȃ̂ł��B
�Ⴆ�A�n�ʂɂԂ������Ƃ��ɑ�����A�Ƃ������{�b�g������܂��B
���������ۂ̐l�Ԃ̏ꍇ�A�n�ʂɂԂ���Α���͂قƂ�Ǐ���ɉ��̂ł��B
�l�Ԃ́A�����u���܂��v���@���w��ł��邾���Ȃ̂ł��B
���̂悤�ȃ��{�b�g�́A��肭�����邾���łȂ��A�w�K�ɂ���ĉ��p���������{�b�g��
�Ȃ�ł��傤�B
544 �F���J�����������F2006/01/11(��) 23:02:39 ID:ZsFpYRFz
>>541
���ƁA�u�K�ɂ܂����v�Ƃ������́u�K�ɓ|��A�R��v�̂ق������m�ł��ˁB
�l�Ԃ̕��s�̗���́A
��ڋ��ْ�������i��������j
��
�i�s�����ɓ]�|�i�ŏ��̐��i�́j
��
��ڋ�o�ɂ�����i�����j
��
�i�s�����̋ւ̏R��i���i�́j
��
����̐ڒn�Ɖ�]�i�N�b�V�������p������j
�Ƃ��������ł��B
���̂����A�R�聨�����]�A�̂Ƃ���͂قڎI�ȃv���Z�X�ł��B
�����Ŏ~�߂邱�Ƃ����ɓ���Ƃ����_��������ꂪ������܂��B
�ł����炱�̕������I�@�\�Ƃ��Ď����ł���A��͑�����������グ��V���v���Ȕ\���I�@�\��
�lj����邾���ŁA��G�l���M�[�Ńe�N�e�N��������킯�ł��B
���ɁA�I�ȏR��o���ɂ�鐄�i�͂́A���s���A���s���̐��i�͂̑唼���߂Ă��܂��B
���ɏd�v�ȂƂ��낾�Əd���܂��B
���ƁA�u�K�ɂ܂����v�Ƃ������́u�K�ɓ|��A�R��v�̂ق������m�ł��ˁB
�l�Ԃ̕��s�̗���́A
��ڋ��ْ�������i��������j
��
�i�s�����ɓ]�|�i�ŏ��̐��i�́j
��
��ڋ�o�ɂ�����i�����j
��
�i�s�����̋ւ̏R��i���i�́j
��
����̐ڒn�Ɖ�]�i�N�b�V�������p������j
�Ƃ��������ł��B
���̂����A�R�聨�����]�A�̂Ƃ���͂قڎI�ȃv���Z�X�ł��B
�����Ŏ~�߂邱�Ƃ����ɓ���Ƃ����_��������ꂪ������܂��B
�ł����炱�̕������I�@�\�Ƃ��Ď����ł���A��͑�����������グ��V���v���Ȕ\���I�@�\��
�lj����邾���ŁA��G�l���M�[�Ńe�N�e�N��������킯�ł��B
���ɁA�I�ȏR��o���ɂ�鐄�i�͂́A���s���A���s���̐��i�͂̑唼���߂Ă��܂��B
���ɏd�v�ȂƂ��낾�Əd���܂��B
545 �F���J�����������F2006/01/11(��) 23:37:04 ID:ZmEzSi2F
>>543
���������ӁB
�w�K���ǂ��g�ނ̂��ŔY�ݐ~�B����ς�p�[�Z�v�g�����{�o�b�N�v���o�Q�[�V����
�Ȃ̂��ȁB
���ƁA�����̎h���ɑ��锽�˂����Ńo�����X�̐���͉\�ł��B�ܐ��
�h�����ꂽ��ܐ�����������A�����Ƃ��h�����ꂽ�炩���Ƃ����������܂��B
����ɂ��o�����X�̂��ƂȂ낭�����ۍl�����Ƃ��X�^�X�^������悤�ɂȂ�
�����Ȃ̂��ȂƎv���Ă���܂��B�����A����̂��A���̉������ȂƁB
���ǁA���������ŐÎ~����ƁA���˂ɑ��鐧�䂾���ł͎������Ȃ��Ȃ�Ƃ������
�ɂԂ������蒆�B
���������ӁB
�w�K���ǂ��g�ނ̂��ŔY�ݐ~�B����ς�p�[�Z�v�g�����{�o�b�N�v���o�Q�[�V����
�Ȃ̂��ȁB
���ƁA�����̎h���ɑ��锽�˂����Ńo�����X�̐���͉\�ł��B�ܐ��
�h�����ꂽ��ܐ�����������A�����Ƃ��h�����ꂽ�炩���Ƃ����������܂��B
����ɂ��o�����X�̂��ƂȂ낭�����ۍl�����Ƃ��X�^�X�^������悤�ɂȂ�
�����Ȃ̂��ȂƎv���Ă���܂��B�����A����̂��A���̉������ȂƁB
���ǁA���������ŐÎ~����ƁA���˂ɑ��鐧�䂾���ł͎������Ȃ��Ȃ�Ƃ������
�ɂԂ������蒆�B
546 �F���J�����������F2006/02/26(��) 00:21:55 ID:tAffw+hK
547 �F���J�����������F2006/02/27(��) 09:05:25 ID:bZUuv31p
>>546
���ۉ��w�K�Ƃ�����@�͂���Ȃ��H
���ۉ��w�K�Ƃ�����@�͂���Ȃ��H
548 �F���J�����������F2006/03/11(�y) 12:13:26 ID:w5CHQLBx
�ǁ[���A���{�b�g�ɉ������̃X�L���i�A�j�L�������܂ށj�Ƃ��Ńn�@�n�@������x�ł��傤�N�B�́I�i��
549 �F���J�����������F2006/03/15(��) 23:06:07 ID:XhjMtoAR
�!:|:::::|::��::|:l::l:;l�l:::�]!| |:::����| l::::::�\!�]+|::_l:::li::::/,���{_��O| Ĥ�R,)
�@�@�@�@�@�@�@�@/�:::::!::l::l:{::!::l:::! ::::l:| |:::����| �!::::::�!:::::l:li:::�gl:l��v� �@���@|/| ނx
�@�@�@�@�@ �@�@/ �n::::!::!:l:|::!�y,�ț~�` �S�S�R�@,�7=!���:l::|:l:i (���@j�@j/}|�@| �@
�@�@ �@ �@ �@ / /�@ �S�:l::|�SY��h ::::::} �@ �@�@�@�Pi�@.::::�R!:|:��i ��,� /�@!Y::|�@|
�@�@�@ �@ �@ �R/�@�@ �@l�M:::`:l|:���@��_''� �@ �@ �@�@�!�:;;;;::��i��/�@/i::i:l:|�@|
�@�@�@�@�@ �@ �@�@�@�@.�b:: ::j:!:kXxx�@�@. �@�@�@�@`�--'/,';!::!j�Y,/�@/::|::��:|:| �b
�@�@�@�@�@ �@ �@ �@ �@ �b:: :l:��:��l�R�A�@�@�@� �@ �@ xXxx//// }j"l�R/ :::��::l:|:L_�
�@�@ �@ �@ �@ �@ �@ �@ �b:: :l:|:l:|:{:{�� � �@ �@�@�@ ,.�@�' /�ܱ��-<|:: i::::|::l:|l
�@ �@ �@ �@ �@ �@ �@ �@ | :: :l:|:l:|:}�~<�܂�` �� ' �@,���7�]�~ <,r��t:�::::|::l:|l
�@�@�@�@�@�@ �@ �@ �@�@j :: :l:|:l:Ɂ@�@ �R l _/�v�@,��܂� ���@�@�@ �S�@�@�:l:::|::::|l�@�@�@
�@�@�@�@�@�@�@�@�@�@�@,' ::;:'i'��~�@�R��@ �!�m�@�,�V������ �@ �@ �@�{�P �o:l::|::::l:l�A
����������@�@�@�@�@/ :;:'/j�j ��@�@)�' `�@�V/� ^Y�� �@ �@ �@ �@˓� Y::|::::l::��i�@
�@ �@ �@ �@ �@�@�@�@/::;:'/:;��._��r',r��__,//,f'�O݁� ! �@ �@�@�@�@�k.__��::l::::|::l:i�A�@
.�@�@�@�@�@�@�@ �@ /:;:'/::;r'�-{�PY^y-�]�]��� }�m�o�@ �Rl�@�@�@�@�@�@�g��@�M)!| ::|::l::l�@
�@�@�@ �@ �@�@�@�@l::;'/::;�Y�@ ,ݰ��́A__� ,�j�] �j�@�@�!�@�@�@ �@�@|/`y{ |::| ::|::|::|�@�@�@�@
�@ �@ �@ �@ �@ �@ �/�Y �@�^�@ / j �@ |�@| l �Ɂi�@�@�@�� �@�@�@�@�@|�Rj | l:::| ::|::|::|
�@ �@ �@ �@ �@ �@ ˂x �@ �@�__,/�@{_�Q��@�!{ �g�_}�@�@�@l �@ �@ �@�@!'�L//j � !j }l/ �@
�@�@�@�@�@ �@ �@ �@˂�. �@ �@ �@ �@ �@�@�@�@�@�x__���@�@�@���@�@�@�@�@|�V/ / �V/ �@ �@
�@�@�@�@�@�@�@�@�@�@���@�@�@�@�@�@�@�@ �@ �@ �_ �j �@ �@�! �@ �@ �@ ! / / �@ /
�@�@�@ �@�@�@�@�@�@�@`�S_�@�@�@�@�@�@�@�@�@�@�R-}�@_�^ ,� �@ �@ �@l �@ �@ �@
�@ �@ �@ �@ �@ �@ �@ �@ �@ `�]�� � _�@�@�@�@_ _�@}'��� �@ /�@_! �@ �@�@�g
���ɂ�ɂ�̂�age
�@�@�@�@�@�@�@�@/�:::::!::l::l:{::!::l:::! ::::l:| |:::����| �!::::::�!:::::l:li:::�gl:l��v� �@���@|/| ނx
�@�@�@�@�@ �@�@/ �n::::!::!:l:|::!�y,�ț~�` �S�S�R�@,�7=!���:l::|:l:i (���@j�@j/}|�@| �@
�@�@ �@ �@ �@ / /�@ �S�:l::|�SY��h ::::::} �@ �@�@�@�Pi�@.::::�R!:|:��i ��,� /�@!Y::|�@|
�@�@�@ �@ �@ �R/�@�@ �@l�M:::`:l|:���@��_''� �@ �@ �@�@�!�:;;;;::��i��/�@/i::i:l:|�@|
�@�@�@�@�@ �@ �@�@�@�@.�b:: ::j:!:kXxx�@�@. �@�@�@�@`�--'/,';!::!j�Y,/�@/::|::��:|:| �b
�@�@�@�@�@ �@ �@ �@ �@ �b:: :l:��:��l�R�A�@�@�@� �@ �@ xXxx//// }j"l�R/ :::��::l:|:L_�
�@�@ �@ �@ �@ �@ �@ �@ �b:: :l:|:l:|:{:{�� � �@ �@�@�@ ,.�@�' /�ܱ��-<|:: i::::|::l:|l
�@ �@ �@ �@ �@ �@ �@ �@ | :: :l:|:l:|:}�~<�܂�` �� ' �@,���7�]�~ <,r��t:�::::|::l:|l
�@�@�@�@�@�@ �@ �@ �@�@j :: :l:|:l:Ɂ@�@ �R l _/�v�@,��܂� ���@�@�@ �S�@�@�:l:::|::::|l�@�@�@
�@�@�@�@�@�@�@�@�@�@�@,' ::;:'i'��~�@�R��@ �!�m�@�,�V������ �@ �@ �@�{�P �o:l::|::::l:l�A
����������@�@�@�@�@/ :;:'/j�j ��@�@)�' `�@�V/� ^Y�� �@ �@ �@ �@˓� Y::|::::l::��i�@
�@ �@ �@ �@ �@�@�@�@/::;:'/:;��._��r',r��__,//,f'�O݁� ! �@ �@�@�@�@�k.__��::l::::|::l:i�A�@
.�@�@�@�@�@�@�@ �@ /:;:'/::;r'�-{�PY^y-�]�]��� }�m�o�@ �Rl�@�@�@�@�@�@�g��@�M)!| ::|::l::l�@
�@�@�@ �@ �@�@�@�@l::;'/::;�Y�@ ,ݰ��́A__� ,�j�] �j�@�@�!�@�@�@ �@�@|/`y{ |::| ::|::|::|�@�@�@�@
�@ �@ �@ �@ �@ �@ �/�Y �@�^�@ / j �@ |�@| l �Ɂi�@�@�@�� �@�@�@�@�@|�Rj | l:::| ::|::|::|
�@ �@ �@ �@ �@ �@ ˂x �@ �@�__,/�@{_�Q��@�!{ �g�_}�@�@�@l �@ �@ �@�@!'�L//j � !j }l/ �@
�@�@�@�@�@ �@ �@ �@˂�. �@ �@ �@ �@ �@�@�@�@�@�x__���@�@�@���@�@�@�@�@|�V/ / �V/ �@ �@
�@�@�@�@�@�@�@�@�@�@���@�@�@�@�@�@�@�@ �@ �@ �_ �j �@ �@�! �@ �@ �@ ! / / �@ /
�@�@�@ �@�@�@�@�@�@�@`�S_�@�@�@�@�@�@�@�@�@�@�R-}�@_�^ ,� �@ �@ �@l �@ �@ �@
�@ �@ �@ �@ �@ �@ �@ �@ �@ `�]�� � _�@�@�@�@_ _�@}'��� �@ /�@_! �@ �@�@�g
���ɂ�ɂ�̂�age
550 �F���J�����������F2006/03/29(��) 20:03:33 ID:vo5yQ9v6
�l�Ԃ̓������@�B�Œ����ɍČ�����ɂ�600�̃��[�^�[���K�v�炵���ł��B
�������������E�̃q���[�}�m�C�h�E���{�b�g�̃��[�^�[����30�`40���x�B
�F�����I�ł����[�^�[���g���Ă�炵���i�����{���琄���j�B
����MS��600�̃��[�^�[���g�p���Ă���v�Z�ɂȂ�܂��B
3000�����̃��[�^�[1�̒l�i��4���~�Ȃ̂�600�Ōv2400���~�B
3000�����~600�ōő�o��180�������̃W�F�l���[�^�𓋍ڂ��Ȃ���Ȃ�Ȃ��B
100���������̌���1��̌������3000���~������100�������~2��Ōv6000���~�B
�{�f�B�����\�����R���s���[�^����уZ���T���̓d����p�A�X�ɂ����̉��H����܂߂�ƍŒ�ł�1���~�͕K�v�B
�������������E�̃q���[�}�m�C�h�E���{�b�g�̃��[�^�[����30�`40���x�B
�F�����I�ł����[�^�[���g���Ă�炵���i�����{���琄���j�B
����MS��600�̃��[�^�[���g�p���Ă���v�Z�ɂȂ�܂��B
3000�����̃��[�^�[1�̒l�i��4���~�Ȃ̂�600�Ōv2400���~�B
3000�����~600�ōő�o��180�������̃W�F�l���[�^�𓋍ڂ��Ȃ���Ȃ�Ȃ��B
100���������̌���1��̌������3000���~������100�������~2��Ōv6000���~�B
�{�f�B�����\�����R���s���[�^����уZ���T���̓d����p�A�X�ɂ����̉��H����܂߂�ƍŒ�ł�1���~�͕K�v�B
551 �F ��6TVUOx5OTQ �F2006/03/30(��) 00:31:12 ID:moRJ2ZTk
����
552 �F ��Zm73mIa6sE �F2006/03/30(��) 00:32:25 ID:moRJ2ZTk
����
553 �F���J�����������F2006/04/08(�y) 21:32:20 ID:bmyZsZ6T
���������r�Ń��f���E�I�[�N�����Ȃ₩�������{�b�g�J���|���唭�x���`���[
�E���s��ɋ��_��u���x���`���[��Ɓu���{�E�K���[�W�v�i���s�s������A�����q����\�j��
�@7���A���{�b�g���L�̂������Ȃ��������������A�_�炩�ȕ����̏����^���{�b�g�uFT�v
�@�i�G�t�e�B�j���J�������Ɣ��\�����B�t�@�b�V�����V���[�^���ōs��ꂽ����I�ڂł́A
�@�����ƐL�т��r�ł��Ȃ₩�ɕ����p����ەt�����B
�@FT�͐g��35�Z���`��6���g�A�̏d��800�O�����B���i�̔z�u���H�v���Ď��̂Ƀ����n����
�@�������A�����̑@�ׂȂ��������v���O���~���O�B�]���̓��s���{�b�g�͂Ђ����Ȃ���
�@�����ɂȂ������s�p������ʓI�����A�Ǝ��Z�p�ɂ���āA�܂������ȋr�⍘�̂Ђ˂��
�@�\�������B
�@�J��������������́A�����ւ��l�`�u�o�[�r�[�v�̕��s������ڎw���ă��[�J�[��
�@�\�z�ɒ��ځB�v���̃��f���̕��������������A�X�����Ȃ�������芴���������邽�߁A
�@�X�������m���Ď�������邷��Z���T�[�𓋍ڂ����B
�@FT�Љ�i���{�E�K���[�W�j
�@http://www.robo-garage.com/robo/ft.html
�@FT�摜
�@http://flash24.kyodo.co.jp/photo/PN20060407/PN2006040701002014.-.-.CI0002.jpg
{kind=link}
�@http://www.robo-garage.com/robo/ft_image1.jpg
{kind=link}
554 �F���J�����������F2006/04/11(��) 00:50:18 ID:s3SmQrcK
�ǂ�����ē��ٓ_�����������B�_������Ȃ��Ă��ǂ�����Z�p���łĂ��Ȃ����ȁH
555 �F���J�����������F2006/04/11(��) 23:52:13 ID:FqFgBl3v
>>554
if���P��
if���P��
556 �F���J�����������F2006/04/12(��) 00:21:07 ID:B4c+N0yc
>1
�u�J�[���N�v����ʖڂł��H�i�ցE
�u�J�[���N�v����ʖڂł��H�i�ցE
557 �F���J�����������F2006/04/12(��) 01:19:35 ID:sfiEGK+H
>>554
�Z���T������A�O���O�����Ă邵�A�܂Ƃ��Ȍv�Z�Ȃ��ĂȂ��ł��傤�B
�Z���T������A�O���O�����Ă邵�A�܂Ƃ��Ȍv�Z�Ȃ��ĂȂ��ł��傤�B
558 �F���J�����������F2006/04/12(��) 02:38:41 ID:BlgDUDAe
�����ƌ����͈͂ʼn����������Ȃ炠�̃��{�b�g�͕��ʂɌ����Ƃ���̐���}�g���N�X���g���Ă��Ȃ��B
�܂��d���Ȃ���ȁB6���R�x�r��1���R�x�E���Ă����B
�Ȃ̂ʼn����s���Ă��邩�ƌ����ƁA�̊��̋O�������������x�������āA
��ɓ��̂̌X�����x���]���ɂ��邱�ƂŁA�r�L�������̏d�S�ʒu������������Ă�킯���ȁB
�������̕��@���Ɨ��r�x�����̐��䂪�ł��Ȃ��킯�ŁB
������Ƃ��ŋz��������Ȃ��덷�͑����̃K�^�ƃX���b�v�ʼn������Ă���Ǝv����B
��������s���ł͂Ȃ��ĐÎ~�����Ƃ���ɃK�^�K�^�Ɛk��������ł͂Ȃ����ȁB
�����̃R���p�N�g���̂��߂ɃT�[�{���\���]���ɂ��Ă�����ē_�����邩������B
�܂��d���Ȃ���ȁB6���R�x�r��1���R�x�E���Ă����B
�Ȃ̂ʼn����s���Ă��邩�ƌ����ƁA�̊��̋O�������������x�������āA
��ɓ��̂̌X�����x���]���ɂ��邱�ƂŁA�r�L�������̏d�S�ʒu������������Ă�킯���ȁB
�������̕��@���Ɨ��r�x�����̐��䂪�ł��Ȃ��킯�ŁB
������Ƃ��ŋz��������Ȃ��덷�͑����̃K�^�ƃX���b�v�ʼn������Ă���Ǝv����B
��������s���ł͂Ȃ��ĐÎ~�����Ƃ���ɃK�^�K�^�Ɛk��������ł͂Ȃ����ȁB
�����̃R���p�N�g���̂��߂ɃT�[�{���\���]���ɂ��Ă�����ē_�����邩������B
559 �F���J�����������F2006/04/12(��) 23:25:44 ID:1Z2m1qww
>554
ROBO-ONE�����y�[�W
��5�� ROBO-ONE Technical Conference
CHROINO�ɔ�߂�ꂽ�Z�p�Ƃ́^�����@�q��
ROBO-ONE�����y�[�W
��5�� ROBO-ONE Technical Conference
CHROINO�ɔ�߂�ꂽ�Z�p�Ƃ́^�����@�q��
560 �F���J�����������F2006/04/13(��) 00:16:09 ID:MxDUhyRJ
>559
�ǂB
���S�ɋ����x�[�X�ŁA�w�I�ɕG�L�W���ɗV�r��n�ʂɓ͂����邱�Ƃ����l���Ă��Ȃ��B
����}�g���N�X�H�d�S�O������H�Ȃɂ���H�Ȑ��E�B
��̓I�ɂ͌Ҋ߃��[������������߃��[���������ɂ���z�u�ɂȂ��Ă���̂�
�d�S���x���r�������ς��܂ŏo���Ƃ���2�������ԃ��C�����傫���X������
�V�r��n�ʂɋ߂Â��邱�Ƃ��o����Ƃ������@�B
�Ȃ̂ŁA�d�S�����E�ɑ傫���U���āA���̃s�[�N�ň�u�Î~���V�r�𒅒n�����铮���ɂȂ�B
���ꂪ�uSHIN-WALK�v���Õ��s�I�Ȃ��������������s�����ł��Ȃ����R�B
���Ȃ��Ƃ��N���C�m�̒i�K�ł͊��S�ɃI�[�v�����[�v�œ��삵�Ă��āA
�W���C���ɂ��o�����X����̗]�n�͂Ȃ��B
FT�łǂ�����ăo�����X���䂵�Ă邩�͕s������
�����炭>558�ɂ���悤�ȍ��x�Ȃ��Ƃ͂���ĂȂ��Ǝv���B
���Ȃ݂ɓ�������o����Ă���悤�������[�����������[�����̓����ɔz����
���s���{�b�g�͂͂邩�ȑO�ɑ��݂���̂ŁA
�@�\�������ɐV�K�����咣�ł��邩�ǂ����͉�����
�ǂB
���S�ɋ����x�[�X�ŁA�w�I�ɕG�L�W���ɗV�r��n�ʂɓ͂����邱�Ƃ����l���Ă��Ȃ��B
����}�g���N�X�H�d�S�O������H�Ȃɂ���H�Ȑ��E�B
��̓I�ɂ͌Ҋ߃��[������������߃��[���������ɂ���z�u�ɂȂ��Ă���̂�
�d�S���x���r�������ς��܂ŏo���Ƃ���2�������ԃ��C�����傫���X������
�V�r��n�ʂɋ߂Â��邱�Ƃ��o����Ƃ������@�B
�Ȃ̂ŁA�d�S�����E�ɑ傫���U���āA���̃s�[�N�ň�u�Î~���V�r�𒅒n�����铮���ɂȂ�B
���ꂪ�uSHIN-WALK�v���Õ��s�I�Ȃ��������������s�����ł��Ȃ����R�B
���Ȃ��Ƃ��N���C�m�̒i�K�ł͊��S�ɃI�[�v�����[�v�œ��삵�Ă��āA
�W���C���ɂ��o�����X����̗]�n�͂Ȃ��B
FT�łǂ�����ăo�����X���䂵�Ă邩�͕s������
�����炭>558�ɂ���悤�ȍ��x�Ȃ��Ƃ͂���ĂȂ��Ǝv���B
���Ȃ݂ɓ�������o����Ă���悤�������[�����������[�����̓����ɔz����
���s���{�b�g�͂͂邩�ȑO�ɑ��݂���̂ŁA
�@�\�������ɐV�K�����咣�ł��邩�ǂ����͉�����
561 �F���J���������� �F2006/05/01(��) 10:03:38 ID:zvriyOGj
�l�Ԃ̑����͂ǂ̂悤�ɂ��Ēn�ʂ���̏Ռ����z�����Ă���
�̂��A�ǂȂ��������Ă��������B
�悭�y���܂��ȂK�v�Ȃ��B�Ε����ł��������炾�Ɉُ��
�N����Ȃ��A�ȂǂƂ����l�����܂����A�{���ł����B
�̂��A�ǂȂ��������Ă��������B
�悭�y���܂��ȂK�v�Ȃ��B�Ε����ł��������炾�Ɉُ��
�N����Ȃ��A�ȂǂƂ����l�����܂����A�{���ł����B
562 �F���J�����������F2006/05/01(��) 11:08:01 ID:mg2/sSEs
>>561
�����̃o�l�͕G���炾��B
�����̃o�l�͕G���炾��B
563 �F���J�����������F2006/05/01(��) 12:26:46 ID:zvriyOGj
564 �F���J�����������F2006/05/01(��) 14:14:17 ID:mg2/sSEs
>>563
���s�E���s���̋r�̒��n��������ł���B
�y���܂��Ƃ������A�ܐ悪�Ȃ�̂��߂ɂ��Ă邩���ȁB
�y���܂��́A�V���b�N�A�u�\�[�o�Ƃ��ẮA�R��r�̏R��̏Ռ����ɘa������̂��Ǝv���B
�ܐ�́A
�P�D�������̑O�㓮�h�ɑ��ăo�����X�����
�y���܂��������o�������Ă�ƒ�������̓����B
�ŁA�ܐ悪����ƘR��Ȃ��y���܂��Ƃ������A�������Ƀt���[��������ƁB
�Q�D���s���̑��̒��������ɕۂ���
���邢�́A�R����Ԃ����čs�������
���s�E���s���̋r�̒��n��������ł���B
�y���܂��Ƃ������A�ܐ悪�Ȃ�̂��߂ɂ��Ă邩���ȁB
�y���܂��́A�V���b�N�A�u�\�[�o�Ƃ��ẮA�R��r�̏R��̏Ռ����ɘa������̂��Ǝv���B
�ܐ�́A
�P�D�������̑O�㓮�h�ɑ��ăo�����X�����
�y���܂��������o�������Ă�ƒ�������̓����B
�ŁA�ܐ悪����ƘR��Ȃ��y���܂��Ƃ������A�������Ƀt���[��������ƁB
�Q�D���s���̑��̒��������ɕۂ���
���邢�́A�R����Ԃ����čs�������
565 �F���J�����������F2006/05/01(��) 15:46:36 ID:zvriyOGj
>>564
���肪�Ƃ��������܂��B
�ł��A�܂��킩��܂���B
�P�j�u�R��r�̏R��̏Ռ����ɘa����v�Ƃ����̂͂ǂ��������Ƃł����H
�Q�j�u���s���̑��̒��������ɕۂ���
�@�@���邢�́A�v�Ƃ����̂͂ǂ��������Ƃł����H
�@�@�u�r�v�ł͂Ȃ��u���i�����j�v�ł����H
�@�@���s���ɑ��̒������ς��̂ł����H
�@�@�u�R����Ԃ����čs������ʁv���Ăǂ������Ӗ��ō������H
���肪�Ƃ��������܂��B
�ł��A�܂��킩��܂���B
�P�j�u�R��r�̏R��̏Ռ����ɘa����v�Ƃ����̂͂ǂ��������Ƃł����H
�Q�j�u���s���̑��̒��������ɕۂ���
�@�@���邢�́A�v�Ƃ����̂͂ǂ��������Ƃł����H
�@�@�u�r�v�ł͂Ȃ��u���i�����j�v�ł����H
�@�@���s���ɑ��̒������ς��̂ł����H
�@�@�u�R����Ԃ����čs������ʁv���Ăǂ������Ӗ��ō������H
566 �F���J�����������F2006/05/01(��) 22:05:24 ID:uCxpRxvm
>>565
�P�D�R��r�ɏ���Ă��鎞�Ԃ̉d�̕ϓ����ɘa�������
�Q�D����B���̍��������ɕۂ���
�@�@�r�͌Ҋ߂𒆐S�ɉ~�ʂ�`���킯�ŁA������Ԃ��炻�̂܂܌��ɏR�肾������
�@�@���̈ʒu���������Ă��܂��B�����炻��E����悤�������オ��킯���B
�ܐ悪�������{�b�g�ł́A�ŏ��ɕG���Ȃ��Ă���B
������ɂ́A�t�^���w�ɂ�������ٓ_�̉���Ƃ����ʂ̖ړI�����邯�ǁB
�P�D�R��r�ɏ���Ă��鎞�Ԃ̉d�̕ϓ����ɘa�������
�Q�D����B���̍��������ɕۂ���
�@�@�r�͌Ҋ߂𒆐S�ɉ~�ʂ�`���킯�ŁA������Ԃ��炻�̂܂܌��ɏR�肾������
�@�@���̈ʒu���������Ă��܂��B�����炻��E����悤�������オ��킯���B
�ܐ悪�������{�b�g�ł́A�ŏ��ɕG���Ȃ��Ă���B
������ɂ́A�t�^���w�ɂ�������ٓ_�̉���Ƃ����ʂ̖ړI�����邯�ǁB
567 �F���J�����������F2006/05/02(��) 01:34:36 ID:ReVm6i2m
�y���܂��Ƃ������́A���̍������Ǝw�̕t�����ƂŃA�[�`��ɂȂ��Ă�Ƃ���ɏՌ��z�����ʂ�����B
�����瑫�̗����ׂ̂͂ɂւ���łȂ��Ă������B
���ʂ̐l�Ԃ͋ؓ������̂�����������i���Ă��邩��ւ����`�ɂȂ��Ă邯��
�C�`���[�Ȃ͋ؓ����肷���ĝG���ɂȂ�������Ă�炵����
�����瑫�̗����ׂ̂͂ɂւ���łȂ��Ă������B
���ʂ̐l�Ԃ͋ؓ������̂�����������i���Ă��邩��ւ����`�ɂȂ��Ă邯��
�C�`���[�Ȃ͋ؓ����肷���ĝG���ɂȂ�������Ă�炵����
568 �F���J�����������F2006/05/02(��) 08:51:11 ID:C1bYWq1N
569 �F���J�����������F2006/05/02(��) 19:03:22 ID:uw5B3zV9
570 �F���J�����������F2006/05/05(��) 22:03:42 ID:7Pq/jjqr
�����ۍ���
���s���{�b�g�u���[���E�H�[�J�[�Q�v���J��
���s���x�̍������Ƌ@�̂̍����x��������
�܂��A���s�@�ɔ�ׁA�啝�Ƀo�b�e���[�쓮���Ԃ������B
���s���{�b�g�u���[���E�H�[�J�[�Q�v���J��
���s���x�̍������Ƌ@�̂̍����x��������
�܂��A���s�@�ɔ�ׁA�啝�Ƀo�b�e���[�쓮���Ԃ������B
571 �F���J�����������F2006/05/06(�y) 09:21:58 ID:hxrjvtb4
572 �F���J�����������F2006/09/07(��) 14:36:37 ID:mLbk0YhW
����age
573 �F���{�����Д��g�Ɉꔭ���{�b�g��s�ƃ��{�b�g���ʂƃV�����������F2006/09/07(��) 20:10:56 ID:Y94CLNgL
���O�F ���ʃ^�C�vASIMO��NASAi-BOTO
http://i-bbs.sijex.net/imageDisp.jsp?id=test&file=1157175894054o.jpg
���{�c�Z�������������s���{�b�gASIMO���ʑΉ��^�C�v���J���B
���y�m�[�}���E�A�V���z �{�NASIMO�ł� ... �A�M�R�̃A�V���͉���������?!!
���y�O�V�� (MS-07Bsimo ... www.dfnt.net/t/photo/column/asimo.shtml
��STOP! ASIMO �����A�V�����C���N�h���� - ����� ... �����A�V�����C���N�h����
��http://www.e22.com/ahoo/index.htm
��
���l�ތ��ʊ����͉�����40�N�O�̘b�B50���N�L�O�̈�,�\���\�����������c ���{�L�l�T���Ȃ�Ĕn���n�������B
������Ȃ��Ƃ�������l�^���{�b�g�� ���p�����x���܂Ŋ��������Č��ɂP�O�O�̂قǏ풓�B
���n������̎w�߂ŐF�X�d���� ���Ă��炤���������B������̃u���O�����M�����悤�B
������ȃV�[���𐢊E�ɔ��M��������{�ɂ͓G��Ȃ��Ǝv������B �Z�p�ʂ͕ʂɂ���
http://i-bbs.sijex.net/imageDisp.jsp?id=test&file=1157175894054o.jpg
{kind=link}
���{�c�Z�������������s���{�b�gASIMO���ʑΉ��^�C�v���J���B
���y�m�[�}���E�A�V���z �{�NASIMO�ł� ... �A�M�R�̃A�V���͉���������?!!
���y�O�V�� (MS-07Bsimo ... www.dfnt.net/t/photo/column/asimo.shtml
��STOP! ASIMO �����A�V�����C���N�h���� - ����� ... �����A�V�����C���N�h����
��http://www.e22.com/ahoo/index.htm
��
���l�ތ��ʊ����͉�����40�N�O�̘b�B50���N�L�O�̈�,�\���\�����������c ���{�L�l�T���Ȃ�Ĕn���n�������B
������Ȃ��Ƃ�������l�^���{�b�g�� ���p�����x���܂Ŋ��������Č��ɂP�O�O�̂قǏ풓�B
���n������̎w�߂ŐF�X�d���� ���Ă��炤���������B������̃u���O�����M�����悤�B
������ȃV�[���𐢊E�ɔ��M��������{�ɂ͓G��Ȃ��Ǝv������B �Z�p�ʂ͕ʂɂ���
574 �F���J�����������F2006/09/08(��) 01:44:08 ID:cF92Ojs6
�����E����̒�`���ė�������u�ł������Ă�A������
���{�b�g�J�[�́c�����Ă邯�LjႤ��Ȃ�
�������{�b�g�J�[�Ȃ�ĂȂ����Ȃ�
���{�b�g�J�[�́c�����Ă邯�LjႤ��Ȃ�
�������{�b�g�J�[�Ȃ�ĂȂ����Ȃ�
���ځ[��
576 �F���J�����������F2006/11/23(��) 13:15:21 ID:UezZjc2l
577 �F���J�����������F2007/05/31(��) 08:53:27 ID:erYsBH4k
���܂���@
�U�u���O������@
�U�u���O������@
578 �F���J�����������F2007/05/31(��) 20:38:35 ID:VTc0qqLA
�ȑO�b�l�ŃA�V���炵�����{�b�g���q���ƈꏏ�ɏ�����
���Ă���̂��������ǂ��ꂶ�Ⴞ�߂Ȃ́H
���Ă���̂��������ǂ��ꂶ�Ⴞ�߂Ȃ́H
579 �F���J�����������F2007/06/07(��) 19:05:54 ID:n8E10nNX
�܂��A�ȂA���̃X���������� 04/08/28 ����͂��R�N���x�Ń��{�b�g�Z�p���i���������Ď�����B
580 �F���J�����������F2007/07/23(��) 06:03:25 ID:pgeEPJ6L
�C�f�I���t�@����K���_�����^�������X���Ȃ̂Ō��ė~�����@
�T�U�r�[�̓����̒E�o�|�b�h�̑傫����ǂ����Ă������������@
�j���[�K���_�����E�o�|�b�h�����傫����ǂ����Ă������������@�@
����ăT�U�r�[�͑傫���ċ����̂��@
http://inuyoubi.cocolog-nifty.com/inuyoubi/images/1124279905281.jpg
�T�U�r�[�̓����̒E�o�|�b�h�̑傫����ǂ����Ă������������@
�j���[�K���_�����E�o�|�b�h�����傫����ǂ����Ă������������@�@
����ăT�U�r�[�͑傫���ċ����̂��@
http://inuyoubi.cocolog-nifty.com/inuyoubi/images/1124279905281.jpg
{kind=link}
581 �F���J�����������F2007/07/25(��) 13:15:21 ID:3eKWEruF
�����͒n�̉ʂā@������ĉ�
�����������炢�@�܂��͂��
�u���[�Q�C���@�ܕ�����
�u���[�Q�C���@����߂�������
�C��ڎw���ā@�����L��
�|�̋@�́@��S���悹��
���������@���M��
�����̂悤�Ɂ@�U�u���O���U�u���O��
�����������炢�@�܂��͂��
�u���[�Q�C���@�ܕ�����
�u���[�Q�C���@����߂�������
�C��ڎw���ā@�����L��
�|�̋@�́@��S���悹��
���������@���M��
�����̂悤�Ɂ@�U�u���O���U�u���O��
582 �F�����G���[�g ��H5wAVi2uhY �F2007/10/07(��) 14:45:27 ID:XXV8hW2W
�Q�����˂�łh�c��ς���ɂ̓t���b�c����I�Ԃ̂͗�����������
�h�R�̃v���o�C�_��I�ׂ����̂ł��傤���H
�n�b�m���ƃj���[���Œn�悪�o����̂őʖڂ��Ǝv���܂��B�@
�h�c���ȒP�ɕς������@��@�ނ��Љ�ĉ������B
���肢���܂��B
�ł���P���ɂP�O��ވȏ�̂h�c��ς��đP�l���[�h�∫�l���[�h���g�����������ł��B
�ڂ������@���肢���܂��B
�h�R�̃v���o�C�_��I�ׂ����̂ł��傤���H
�n�b�m���ƃj���[���Œn�悪�o����̂őʖڂ��Ǝv���܂��B�@
�h�c���ȒP�ɕς������@��@�ނ��Љ�ĉ������B
���肢���܂��B
�ł���P���ɂP�O��ވȏ�̂h�c��ς��đP�l���[�h�∫�l���[�h���g�����������ł��B
�ڂ������@���肢���܂��B
583 �F���J�����������F2007/10/08(��) 04:39:58 ID:I8WPC5q5
���^���M�A�̌��������z�I�ȑ�������Ă�
��������ȃ��{�b�g�ł��邩��
��������ȃ��{�b�g�ł��邩��
584 �F���J�����������F2007/10/23(��) 17:07:25 ID:ljrBF213
���傢�X������Ă邩������Ȃ�����
���̃��{�b�g���ĕ��s������Ƃ���Ă�݂����Ȋ���������
���삾���Ō�������������Ȃ�̏�������Ǝv������
����ς�������̔F�������肳������A����͂ǂ��Ƃł��Ȃ�C�������ł���
�O�̉f�����R�����ŃX�L�������āA���g�Ȃōގ��Ƃ����ׂ�Α����肻���ȋC�������ł���
���������̂��ē����ł�����
���̃��{�b�g���ĕ��s������Ƃ���Ă�݂����Ȋ���������
���삾���Ō�������������Ȃ�̏�������Ǝv������
����ς�������̔F�������肳������A����͂ǂ��Ƃł��Ȃ�C�������ł���
�O�̉f�����R�����ŃX�L�������āA���g�Ȃōގ��Ƃ����ׂ�Α����肻���ȋC�������ł���
���������̂��ē����ł�����
585 �F���J�����������F2008/01/23(��) 00:56:22 ID:hVFrWGnh
>>584
�R�E�����݂����ɒ����g�o���Ē��˕Ԃ��ė����̂���M����
�n�`���f�ɗ��p����Ώo���������ȁB
�n�`�c������̂ɃJ�����ł���K�v���Ȃ���
�����g�ɂ�锻�f�Ȃ���������ꏊ�ł����v����
�R�E�����݂����ɒ����g�o���Ē��˕Ԃ��ė����̂���M����
�n�`���f�ɗ��p����Ώo���������ȁB
�n�`�c������̂ɃJ�����ł���K�v���Ȃ���
�����g�ɂ�锻�f�Ȃ���������ꏊ�ł����v����
586 �F���J�����������F2008/04/27(��) 22:08:17 ID:p2GP5GLs
>>582
B�t��+�r�b�O���[�u�ł����A���[�^�̍ċN�����Ƃ�IP���ς��܂��B
B�t��+�r�b�O���[�u�ł����A���[�^�̍ċN�����Ƃ�IP���ς��܂��B
587 �F���J�����������F2008/05/13(��) 03:48:23 ID:VJE4jJi3
�X�y�[�X�E�����i�E�F�C�@�C�f�I���@�C�f�I��
�@ �@ �@ �@ �@ �@ �@ �@ �@ �@ �@ �@ �Q�@�@�@|
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@_��|���==�,|
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@_/����jr��RĤ
�@�@�@�@�@�@�@�@�@�@ �@ �@ �Q|:::::::::::::::|:::|, jj!i�@�@�@�@�Q�Q
�@�@�@�@�@�@�@�@�@�@�@�@�W|�dl|:::::::::::::::|:::/��|�Wi�@ �^',.�@�@ �M',
�@�@�@�@�@�@�Q�Q�@�@�@ ',|�dl.����';::|l��|���^ �@ ', �R�-,',
�@�@�@�@�@/�_ ,,,,,,�__ /�P�P|���׃t=���^�@�@�@�@', �RV�n
�@�@�@�@ /�@�@�__,,-''/ �@ �@ .�� '�L�@ ,-'�L� ( )�@�@�@�@',.�@�u�@',
�@�@�@�@/�@ �i�^�@�@ r ===�^�@_ ,-'�L�@/�@�M�q�M�R�.�@�@',.�@�@�@',
�@�@�@ /�@, ��[�_�^�O �� - '�L�@�R�@ /�@�@�@�@',�@�M�R�_',.�Q�@ ',
�@�@�@/�C�@ �R�O �r====�q�R�O�O�r',__j�Q�Q�Q_',�@�@�@l _�@ �M�A
�@�@�@�@|�@�@�@˓�j.',�@�@�@�R- ' ; 'l |�@�@ �@ �@ �@ 'r=-'�L_,,�M=_'�Q
�@�@ �-L �Q_j�Q_l�R',�@�@�@', ��__i_.!�Q�Q�Q�Q��- '�L�@7�@�@�@j
�@ _�'= '�_.ʰ--� r�]/�] �]/�] �] �] �] - - -_-L_ i( )�@�@ ( �j �j{
�@ l� O/�@| L�@�/�@ |��|�@�@�@�@�@|�Q_f�L ',- -',ā_�@ ,'�@�@ �@ i
�@ || .,��@�!� �/--/- -/- �] �] '�L_�@�@',�@ ',- -'�--�Ɂ@�@ �@ ,'
�@ l�' .|�@ .j�@ �.--�q�| �q�] �] �] ' �L �R�Q',�@ ',- -� _ _ !�@�@�@ /
�@ r ! .�� �m |�@�_�@',�@�@',�@�@�@�@�^�@�@ �R�!�Q.L�Q_j_�@�@ /
�@ | |__�Rr==<|__//�_',�Q_',�@, -���@�@�@�@�@ ',�@V !�@�@�@�Mr-'
�@ ',.Ĥ_ |�@�@�R�@i�@�@ i�R�__','�Q__j,�@�@ �@ �@ ',r�/�@�@�@�@|
�@�@ |��!�@rq �r |�@�@ |�@ �@ �@ �@�n�@�@�@�@�@ V) / / / /
�@�@ | |�@�R�~���@i�@�@ i�@�@�@�@ �@���@',�@ r===�-',-'-'-'-'
�@�@ | |�@�@ r=�_ |�@�@ !�@�@�@ �@ i�@�@V || �@ !l�@�R, ',
�@ �@ �@ �@ �@ �@ �@ �@ �@ �@ �@ �@ �Q�@�@�@|
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@_��|���==�,|
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@_/����jr��RĤ
�@�@�@�@�@�@�@�@�@�@ �@ �@ �Q|:::::::::::::::|:::|, jj!i�@�@�@�@�Q�Q
�@�@�@�@�@�@�@�@�@�@�@�@�W|�dl|:::::::::::::::|:::/��|�Wi�@ �^',.�@�@ �M',
�@�@�@�@�@�@�Q�Q�@�@�@ ',|�dl.����';::|l��|���^ �@ ', �R�-,',
�@�@�@�@�@/�_ ,,,,,,�__ /�P�P|���׃t=���^�@�@�@�@', �RV�n
�@�@�@�@ /�@�@�__,,-''/ �@ �@ .�� '�L�@ ,-'�L� ( )�@�@�@�@',.�@�u�@',
�@�@�@�@/�@ �i�^�@�@ r ===�^�@_ ,-'�L�@/�@�M�q�M�R�.�@�@',.�@�@�@',
�@�@�@ /�@, ��[�_�^�O �� - '�L�@�R�@ /�@�@�@�@',�@�M�R�_',.�Q�@ ',
�@�@�@/�C�@ �R�O �r====�q�R�O�O�r',__j�Q�Q�Q_',�@�@�@l _�@ �M�A
�@�@�@�@|�@�@�@˓�j.',�@�@�@�R- ' ; 'l |�@�@ �@ �@ �@ 'r=-'�L_,,�M=_'�Q
�@�@ �-L �Q_j�Q_l�R',�@�@�@', ��__i_.!�Q�Q�Q�Q��- '�L�@7�@�@�@j
�@ _�'= '�_.ʰ--� r�]/�] �]/�] �] �] �] - - -_-L_ i( )�@�@ ( �j �j{
�@ l� O/�@| L�@�/�@ |��|�@�@�@�@�@|�Q_f�L ',- -',ā_�@ ,'�@�@ �@ i
�@ || .,��@�!� �/--/- -/- �] �] '�L_�@�@',�@ ',- -'�--�Ɂ@�@ �@ ,'
�@ l�' .|�@ .j�@ �.--�q�| �q�] �] �] ' �L �R�Q',�@ ',- -� _ _ !�@�@�@ /
�@ r ! .�� �m |�@�_�@',�@�@',�@�@�@�@�^�@�@ �R�!�Q.L�Q_j_�@�@ /
�@ | |__�Rr==<|__//�_',�Q_',�@, -���@�@�@�@�@ ',�@V !�@�@�@�Mr-'
�@ ',.Ĥ_ |�@�@�R�@i�@�@ i�R�__','�Q__j,�@�@ �@ �@ ',r�/�@�@�@�@|
�@�@ |��!�@rq �r |�@�@ |�@ �@ �@ �@�n�@�@�@�@�@ V) / / / /
�@�@ | |�@�R�~���@i�@�@ i�@�@�@�@ �@���@',�@ r===�-',-'-'-'-'
�@�@ | |�@�@ r=�_ |�@�@ !�@�@�@ �@ i�@�@V || �@ !l�@�R, ',
588 �F���J�����������F2008/05/14(��) 13:07:28 ID:hOpjtqsj
>>587
�_�O������I
�_�O������I
589 �F���J�����������F2008/05/27(��) 19:06:22 ID:2iF/J9w+
���s���{�b�g���ăC���`�L����ˁ[���B
�Ȃ��̂ł������́A
���������ł�����Ⴑ������������Ȃ����H
����ɂ�����ƃE�F�C�g�d���߂Γd�����Ă��|��Ȃ�����B
�����������Ɏ��ł��d�������P���ˁH
�Ȃ��̂ł������́A
���������ł�����Ⴑ������������Ȃ����H
����ɂ�����ƃE�F�C�g�d���߂Γd�����Ă��|��Ȃ�����B
�����������Ɏ��ł��d�������P���ˁH
590 �F���J�����������F2008/05/28(��) 00:05:34 ID:PBV4T3Pe
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �Q�Q��-�\�\�]-���Q�Q
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ ,�B"�L:::::::::::::::::::::::::::::�M�R�A
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@/:Ҥ:_:_:_:_:_:_:_:_:_:_:_:_:_:�m�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@|_||::::::::::::::::::::::::::::::::::::::::::|!|
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@|:|{�O��` �\�\�\�\�];=�!
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@|:|!�м�@ r���@�@ r�� �S_||
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@}:|!�~'�@�@_,...,�@�@�@,...._�@ �||
�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ fWЁ@ :.;�t��';} f�Lrt��,�@}|!
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �SV!�@�@�M""�L,! :. �M"ށL�@jj|�@�@�@����ȃG�T����ނ�Ȃ�
�@�@�@�@�@�@�@�@�@�@/|�P�P�P�P| ��i!�@�@�@ ,r,�__,�)�@ �@ l�
�@�@�@�@�@�@�@�@�@ /,'| �@ �@ �@ �@| �@V� �@ ,.'__..:_:.._�R�@ /�L
�@�@�@ �@ �@ �@ �@ `L| �@ �@ �@ �@|�@/�R�R�A' ��M���` �^
�@�@�@ �@ �@ �@ �@ �@ | �@ �@ �@ �@|/.:.:.:.�_���A�Q_,.�"| Ĥ�A
�@�@�@ �@ �@ �@ �@ �@ |�@�@ 10�@�@|�:.:.:.:.:.:.:�_/���R__//.:.:�r�M��-- ��Q
�@�@�@ �@ �@ �@ �@ �@ |.�@ �@�_ �@.|:::�M::��j�||�u||�H�Ɠ�::�m::::::::::::::::::::�M���A
�@�@�@�@�@�@�@�@�@�@(_�j�@�@�@�@�@.|:_:_:_:{����||:::||:::|Ĥ:_:_:_:_:_>�:::::::::::::::::::::::::�R�A
�@�@�@�@�@�@ ,. -�]:�L,�B"�M)�@�@ �@ !�]�::::�R::::::::�:::||:::�:l|::::::::::::::::::�R::::::::::::::::::::{::::i:�_
�@�@�@�@�@�^::::::::::::�T=�..�A�@ �@ ! /::::::::�R::/::::::||:r'�!�A::::::::::::::::::�R::::::::::::::::::|:::l:::::::�_
�@�@�@ �@ }::::::::::::::::�R �-���@ �@ !':::::::::::::::|:|:::::::F�iiiiii|�R::::::::::::::::::|::::::::::::::::::|:::|:::::::::::�M�R
�@�@�@�@/::::::::::::::::::::(�L ,�C �@ �@ .!::::::::::::::::|:�R:__|iiii|llllll|:||::::::::::::::::::|::::::::::::::::::|:::|:::::::::/:::/`
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ ,�B"�L:::::::::::::::::::::::::::::�M�R�A
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@/:Ҥ:_:_:_:_:_:_:_:_:_:_:_:_:_:�m�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@|_||::::::::::::::::::::::::::::::::::::::::::|!|
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@|:|{�O��` �\�\�\�\�];=�!
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@|:|!�м�@ r���@�@ r�� �S_||
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@}:|!�~'�@�@_,...,�@�@�@,...._�@ �||
�@�@�@�@�@�@�@�@�@�@�@�@ �@ �@ �@ fWЁ@ :.;�t��';} f�Lrt��,�@}|!
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@ �SV!�@�@�M""�L,! :. �M"ށL�@jj|�@�@�@����ȃG�T����ނ�Ȃ�
�@�@�@�@�@�@�@�@�@�@/|�P�P�P�P| ��i!�@�@�@ ,r,�__,�)�@ �@ l�
�@�@�@�@�@�@�@�@�@ /,'| �@ �@ �@ �@| �@V� �@ ,.'__..:_:.._�R�@ /�L
�@�@�@ �@ �@ �@ �@ `L| �@ �@ �@ �@|�@/�R�R�A' ��M���` �^
�@�@�@ �@ �@ �@ �@ �@ | �@ �@ �@ �@|/.:.:.:.�_���A�Q_,.�"| Ĥ�A
�@�@�@ �@ �@ �@ �@ �@ |�@�@ 10�@�@|�:.:.:.:.:.:.:�_/���R__//.:.:�r�M��-- ��Q
�@�@�@ �@ �@ �@ �@ �@ |.�@ �@�_ �@.|:::�M::��j�||�u||�H�Ɠ�::�m::::::::::::::::::::�M���A
�@�@�@�@�@�@�@�@�@�@(_�j�@�@�@�@�@.|:_:_:_:{����||:::||:::|Ĥ:_:_:_:_:_>�:::::::::::::::::::::::::�R�A
�@�@�@�@�@�@ ,. -�]:�L,�B"�M)�@�@ �@ !�]�::::�R::::::::�:::||:::�:l|::::::::::::::::::�R::::::::::::::::::::{::::i:�_
�@�@�@�@�@�^::::::::::::�T=�..�A�@ �@ ! /::::::::�R::/::::::||:r'�!�A::::::::::::::::::�R::::::::::::::::::|:::l:::::::�_
�@�@�@ �@ }::::::::::::::::�R �-���@ �@ !':::::::::::::::|:|:::::::F�iiiiii|�R::::::::::::::::::|::::::::::::::::::|:::|:::::::::::�M�R
�@�@�@�@/::::::::::::::::::::(�L ,�C �@ �@ .!::::::::::::::::|:�R:__|iiii|llllll|:||::::::::::::::::::|::::::::::::::::::|:::|:::::::::/:::/`
591 �F���J�����������F2008/05/29(��) 07:25:18 ID:3S+3Rzk3
���Ƀ}�O�_���̐�`�����Ă���̂�������Ȃ�
592 �F���J�����������F2008/08/01(��) 11:19:03 ID:lboPvHuc
>>584�q���g�F�����@
�Ƃ̘b�Ƃ����ߑ��Ƃ����Ȃ����̂������Ƃ��B�ډ������Ɍq����Ȃ����猤�������Ȃ��Ƃ�
�߂����Ƀg���^���������̂\���邩���m��Ȃ����ǁB�Ƃ�
>>589�傫���E�ʐς͂Ƃ������A�ǂ̓��{�b�g���d���͂Ȃ��͂��B���悪�d���Ȃ�ƁA�d�肪�U��邱�ƂɂȂ��Đ��䂪����Ȃ�̂ł�
�Ƃ̘b�Ƃ����ߑ��Ƃ����Ȃ����̂������Ƃ��B�ډ������Ɍq����Ȃ����猤�������Ȃ��Ƃ�
�߂����Ƀg���^���������̂\���邩���m��Ȃ����ǁB�Ƃ�
>>589�傫���E�ʐς͂Ƃ������A�ǂ̓��{�b�g���d���͂Ȃ��͂��B���悪�d���Ȃ�ƁA�d�肪�U��邱�ƂɂȂ��Đ��䂪����Ȃ�̂ł�
593 �F���J�����������F2009/07/21(��) 10:19:22 ID:73AV+V/G
�����������s�Ȃ�ĉ��ł���Ȍ���ɂȂ��Č������Ă�̂��Ӗ��������B
���ʂ̎��p���l������
http://www.youtube.com/watch?v=ToL3egTOahg
�݂����ȑ��^�C���ŏ㔼�g�̘r���A�w�̋Z�I�A����Z�p��������������ۂnj����I���낤�B
�n�ʂ�����ȑO��Ȃ炻�������n�������o����ē��s�@�\����K�v�ȂȂ�����B
�d������̂͌��Ǐ㔼�g�����A���s�͑��^�C�����{�b�g�����y������̉ۑ肾��B
�펯�I�ɍl���āB���s�����Ȃ�ăA�j�I�^�����҂���ł���Ă�Ƃ����v����ȁB
���ʂ̎��p���l������
http://www.youtube.com/watch?v=ToL3egTOahg
�݂����ȑ��^�C���ŏ㔼�g�̘r���A�w�̋Z�I�A����Z�p��������������ۂnj����I���낤�B
�n�ʂ�����ȑO��Ȃ炻�������n�������o����ē��s�@�\����K�v�ȂȂ�����B
�d������̂͌��Ǐ㔼�g�����A���s�͑��^�C�����{�b�g�����y������̉ۑ肾��B
�펯�I�ɍl���āB���s�����Ȃ�ăA�j�I�^�����҂���ł���Ă�Ƃ����v����ȁB
594 �F���J�����������F2009/07/25(�y) 12:23:56 ID:0tq/WPI5
�^�C���ł͈ړ��ł��Ȃ��Ƃ��낪�����ƌ����Ȃ�^�C���Ŏ�����镽�R�Ȋ���
���₷�ׂ����낤�Ƃ͎v���ˁB
�Ԉ֎q�����g���Đ������Ă�l������킯�����B
�����Ƃŗ��p����Ȃ�X�y�[�X�̓s���œ���Ȃ��ƌ����������B
���₷�ׂ����낤�Ƃ͎v���ˁB
�Ԉ֎q�����g���Đ������Ă�l������킯�����B
�����Ƃŗ��p����Ȃ�X�y�[�X�̓s���œ���Ȃ��ƌ����������B
595 �F���J�����������F2009/08/01(�y) 07:13:05 ID:d4WX3lQy
http://www.youtube.com/watch?v=sv35ItWLBBk&eurl=http%3A%2F%2Fwww.engadget.com%2F2009%2F07%2F31%2Ftoyotas-humanoid-robot-was-born-to-run%2F&feature=player_embedded
�g���^�̑����Ă܂���
�g���^�̑����Ă܂���
596 �F���J�����������F2009/08/01(�y) 17:43:13 ID:Se6UX+3K
>>594
�����Ƃŗ��p����̂ɑ���̂͌��������낗
�����Ƃŗ��p����̂ɑ���̂͌��������낗
597 �F���J�����������F2010/02/06(�y) 09:31:10 ID:1SCP8UvA
���Ȃ�ď���ł��I�I�G�����l�ɂ̓\�����������̂ł��I�I
2010�N2�� 5��NASA��GM���J���A�l�Ԃɋ߂����{�b�gR2
http://wiredvision.jp/news/201002/2010020523.html
���͖����炵��
2010�N2�� 5��NASA��GM���J���A�l�Ԃɋ߂����{�b�gR2
http://wiredvision.jp/news/201002/2010020523.html
���͖����炵��
598 �F���J�����������F2010/05/20(��) 17:14:25 ID:+jvXVj+Z
���{���{�b�g�w�2008�N10�����ɁA���c�G�i���i�Y�ƋZ�p�����������j�A�����m�����i�����A��B��w�A���E����w�j�ɂ�����L���u�����̃q���[�}�m�C�h�v���f�ڂ���Ă��܂��B
������̕\�u�\�������i���v�ɂ��ƁA2008�N�i���݁j�̃q���[�}�m�C�h�͏d��50kg�A���s���x7km/h�A�ߔʏd��10kg�ƋL����Ă��܂��B
2050�N�̗\���ł͂��ꂪ�d��30kg�A���s���x60km/h�A�ߔʏd��100kg�ƂȂ�悤�ł��B
������̕\�u�\�������i���v�ɂ��ƁA2008�N�i���݁j�̃q���[�}�m�C�h�͏d��50kg�A���s���x7km/h�A�ߔʏd��10kg�ƋL����Ă��܂��B
2050�N�̗\���ł͂��ꂪ�d��30kg�A���s���x60km/h�A�ߔʏd��100kg�ƂȂ�悤�ł��B